
選擇最合適的LCD控制方法
摘要: 使用電流泵和梯形電阻的模擬LCD控制標準已經(jīng)在半導(dǎo)體行業(yè)存在20多年了,新一代數(shù)字控制方法將會證明其是一個可行的替代方案,因為它們實現(xiàn)的尺寸小,功耗低。
Abstract:
Key words :
摘要
LCD(很多種)已經(jīng)使用30多年了,其驅(qū)動方式已為大家所熟悉,并在過去的20年里一直保持不變。然而,LCD材料的進步以及對密度調(diào)制新的認識,使得可以有新的數(shù)字方法,其可以升級到芯片過程,可以有更具成本效益的設(shè)計。這篇文章將會介紹傳統(tǒng)的實現(xiàn)方式,將介紹兩種只需要數(shù)字信號來驅(qū)動LCD的方法。第一種方法依賴于不同頻率信號的相關(guān)與不相關(guān)性,而第二種方法是通過LCD玻璃的低通濾波屬性允許它由密度調(diào)制信號驅(qū)動。我們會介紹這兩種技術(shù)的優(yōu)點,如識別率、供電電壓的開關(guān)電壓極限,將會介紹多種電平,多種類型。我們還會示范三種常用的類型。
傳統(tǒng)上,LCD控制在微控制器中已經(jīng)完成,主要通過兩種不同方式,但只要是模擬方式實現(xiàn)。這些實現(xiàn)方式包括一個梯形電阻或電流泵,業(yè)界更常用的是梯形電阻。使用梯形電阻,一系列的電阻彼此堆疊,形成一個很大的分壓器,在這里可以獲得多個電平,然后在恰當?shù)臅r間集合到適當?shù)腉PIO,從而產(chǎn)生所需的LCD控制波形,這取決于LCD的MUX值。梯形電阻阻值的選定由芯片實現(xiàn),在功耗與圖象顯示品質(zhì)上都很有效。
LCD是一種理想的電容負載。通過選擇一個很大的電阻,由于電容負載不斷的充放電,所以會產(chǎn)生失真波形。這可能導(dǎo)致生成不恰當?shù)腖CD控制波形,這會影響LCD的顯示,因為某些segment可能顯得可定義的比其他的多。通過減少電阻值,波形失真可以減少,但代價是增加了功耗。關(guān)鍵是要找到節(jié)能和LCD控制波形完整性之間的平衡點。此外,實施LCD驅(qū)動模擬子系統(tǒng)需要的成本會變得非常昂貴(由于片內(nèi)子系統(tǒng)尺寸)。以PSoC 3控制器為例, LCD架構(gòu)會占用大約~350k平方微米。
當模擬LCD系統(tǒng)主導(dǎo)市場時,與新技術(shù)和LCD背后的制造過程相匹配的密度調(diào)制理解的增長,使得需要有一個有效驅(qū)動LCD的新方法。例如,純數(shù)字LCD控制技術(shù)可應(yīng)用于產(chǎn)生LCD控制信號,當察看LCD時,不能和模擬方法區(qū)分開來。與此同時,數(shù)字方式還可提供額外的好處。有兩個不同但類似的實現(xiàn)方式,包括數(shù)字相關(guān)和密度調(diào)制。
原理
傳統(tǒng)上,LCD電流泵或電阻分壓器可以產(chǎn)生多個偏置電壓,如而產(chǎn)生如圖1所示的梯形波形。
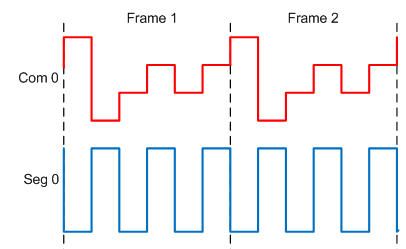
圖1 : 傳統(tǒng)的模擬控制波形
確切的電壓階數(shù)取決于期望的偏置電平。偏置是適用于LCD的電壓臺階數(shù)目。精確的數(shù)目依賴于Mux比率,即LCD中common數(shù)目的倒數(shù)。例如,一個4common的LCD mux比率是1/4。然后使用這些多重電壓來保持適當?shù)碾娖剑员3帜扯蔚拈_或關(guān)。每common所需的偏置數(shù)量可以通過方程1計算出來。
 方程1
方程1
這種方法的優(yōu)勢是可以產(chǎn)生高識別率,但它會造成潛在的功耗成本和芯片實現(xiàn)成本的提高。使用數(shù)字相關(guān)技術(shù),不是使用多個模擬電平,而是使用標準數(shù)字邏輯電平, LCD控制波形在合適的時候在Vdd和地之間切換。這種方法有兩個主要優(yōu)勢。首先,使用這種技術(shù),可以用非常有限的硬件實現(xiàn)(如定時器或PWM),使用DMA或微控制器控制固件和ISR。目前市場上可用的微控制器和FPGA具備實現(xiàn)這種控制技術(shù)所需的資源。這種方法的第二個主要優(yōu)勢是,這種實現(xiàn)也可以很容易地在低功率模式下使控制系統(tǒng)驅(qū)動LCD。當器件由定時器ISR觸發(fā)喚醒開始下一楨時,控制器件只需要調(diào)整GPIO到邏輯高電平或低電平,然后返回低功率模式。GPIO將會保持進入低功耗模式時的引腳狀態(tài),因此在低電源模式不需要大量的內(nèi)部部件處于active。由于數(shù)字相關(guān)的LCD控制所需的管理步驟很簡單,active模式需要的時間就很少,所以可以最大限度地節(jié)省功耗。下圖給出了使于數(shù)字相關(guān)控制波形的一個例子,見圖2。
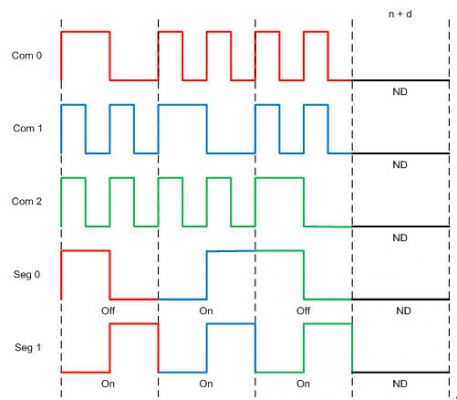
圖2 數(shù)字相關(guān)控制波形
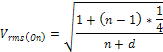
控制波形是這樣產(chǎn)生的,選中底板(common)時是segment波形相關(guān)信號,不選是不相關(guān)信號。在子楨周期結(jié)束的時候,實現(xiàn)停滯狀態(tài)。與傳統(tǒng)的模擬方法不同,可以用DAC產(chǎn)生各種偏置水平,需要調(diào)整LCD RMS的電壓來產(chǎn)生適當?shù)拈_關(guān)電平。由于經(jīng)過segment的電壓與的segment and common(Seg-Com)的電壓不同,通過驅(qū)動這兩條線到相同的電平, 5 V或0 V,就會產(chǎn)生一段時間的0 V,從而影響到經(jīng)過segment的RMS電壓。LCD的每一segment都有一個Von和Voff閾值電平。這些閾值電平可以通過下列方程計算,這里“ d”代表停滯狀態(tài)數(shù)目,“ n ”代表common數(shù)。

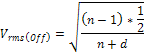
方程2


方程3
識別率是很重要的參數(shù),其定義為VRMS(On) 和VRMS(Off)之間的比率。其差距較大,將會顯示越多的定義了的開關(guān)segment。如果這兩個參數(shù)太接近,它就很難區(qū)分開和關(guān)的segment。計算數(shù)字相關(guān)識別率的方程如下。

方程4
從這個方程可以看出,隨著LCD common數(shù)量的增加,識別率會降低。在任何控制方法中識別率都是這樣的。識別率并不像理想的模擬控制方法那么有效率,不過對于當今的4common LCD來說已經(jīng)足夠了。
使用密度調(diào)制,由系統(tǒng)內(nèi)PWM組成,可以產(chǎn)生類似傳統(tǒng)模擬方法的波形。理想情況下,LCD模型是一個電容。然而,由于LCD玻璃的固有特性, LCD模型更像一個濾波器。LCD的這些固有特性在這種情況下是有利的。通過改變PWM參數(shù),LCD的濾波器特性可用于生產(chǎn)直流電壓。通過這種方法,產(chǎn)生的波形和圖1所示的傳統(tǒng)模擬方法非常相似。
該方法的最大優(yōu)勢是成本。由于是數(shù)字硬件來產(chǎn)生波形,數(shù)字元件比模擬硬件占用的die要小。開始PSoC3給出的值是近似~ 350 k 平方微米。通過切換到純粹的數(shù)字系統(tǒng),估計這個數(shù)字會降低到大約5.5 k平方微米。實現(xiàn)數(shù)字系統(tǒng)比相應(yīng)模擬器件來說還會明顯減少芯片設(shè)計風險。請注意,這一切隨之而來的代價是更高的功率消耗,這是由于PWM需要更高速度的時鐘。然而,在LCD管腳添加額外的外部電阻可以平衡這種實現(xiàn)的功耗。


方程5

方程6
這種方法的識別率比數(shù)字相關(guān)更高,可以產(chǎn)生更多的可定義的顯示,如方程7所示。

方程7
實現(xiàn)
下面的工程范例是使用PSoC 3/5在PSoC Creator環(huán)境中實現(xiàn)和配置的。這個項目配置為可以實現(xiàn)數(shù)字相關(guān)和密度調(diào)制兩種方法,1/2 和1/3偏置。在工程文件中通過簡單地改變一些參數(shù),工程文件就可以實現(xiàn)任何LCD控制技術(shù)。有兩個主要的LCD控制部分。第一個驅(qū)動控制排序,如圖3所示。第二部分是引腳驅(qū)動邏輯,見圖4,其獲得各種控制和驅(qū)動信號,并用適當?shù)倪壿嫿Y(jié)合來生產(chǎn)所需的驅(qū)動波形。

圖 3 數(shù)字LCD控制控制和驅(qū)動排序
序列器是用來指示正在生成控制波形子幀,同時決定波形信號是否需要倒置。這個模塊扮演了一個連續(xù)循環(huán)的狀態(tài)機角色。一旦整個LCD波形產(chǎn)生,它會翻轉(zhuǎn)并重新開始。圖3中所示為4 common 顯示配置。然而,通過增加SubFrame[0..1]的尺寸,這個序列器可以擴展到多達16common。
PWM的停滯狀態(tài)主要是用于控制差異,可以通過調(diào)整之前提到的RMS電壓實現(xiàn)。通過改變PWM停滯時間參數(shù),將common 和segment驅(qū)動為低的時間增加,從而降低LCD控制的RMS電壓。
PWM偏置產(chǎn)生了兩個PWM信號:一個高電平信號和一個低電平信號。當提到LCD為1/2, 1/3,或1/4偏置時,指的是結(jié)合系統(tǒng)的高、低電平產(chǎn)生所需的最終電平。


此內(nèi)容為AET網(wǎng)站原創(chuàng),未經(jīng)授權(quán)禁止轉(zhuǎn)載。