
溫度遙控遙測是遠(yuǎn)程實(shí)現(xiàn)對溫度的測量與控制,特別適合那些環(huán)境惡劣,測量人員不容易接近的場合,近年來在工農(nóng)業(yè)生產(chǎn)中應(yīng)用廣泛。根據(jù)遙控遙測系統(tǒng)的特點(diǎn),提出了對水溫遙控遙測的設(shè)計(jì)方案。
1 總體方案設(shè)計(jì)
溫度遙控遙測系統(tǒng)主要由微處理器系統(tǒng)、測溫模塊、加熱模塊、通信模塊、液位模塊以及上位機(jī)軟件等組成。系統(tǒng)構(gòu)成如圖1所示。
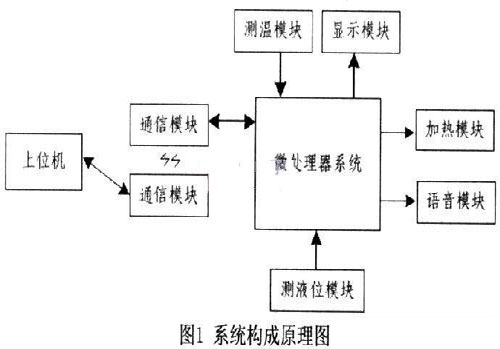
測溫模塊測量液體溫度后,把溫度數(shù)值發(fā)送給微處理器,當(dāng)溫度變化達(dá)到一定值后,加熱模塊開始加熱,首先可以在設(shè)定的時間內(nèi),加熱到設(shè)定的溫度并穩(wěn)定在該溫度一段時間。系統(tǒng)還可以按照設(shè)計(jì)好的各溫度節(jié)點(diǎn)進(jìn)行分段折線加熱,精度很高。測液位模塊實(shí)時測量液體液位,并傳給微處理器。系統(tǒng)通過兩個通信模塊實(shí)現(xiàn)遙測遙控,上位機(jī)設(shè)好溫度參數(shù)后,通過通信模塊傳給遠(yuǎn)處的微處理器,微處理器按照上位機(jī)設(shè)定好的溫度控制加熱模塊進(jìn)行加熱,同時微處理器把液體溫度和液位高度通過通信模塊傳給上位機(jī)軟件,通過上位機(jī)軟件界面可以實(shí)時顯示和監(jiān)測液體溫度和高度。顯示模塊把系統(tǒng)的溫度、高度等各項(xiàng)數(shù)據(jù)實(shí)時顯示在液晶屏幕上。
程序采用PID算法,建立比例、積分、微分?jǐn)?shù)學(xué)模型,控制TCA785移相觸發(fā)器正負(fù)觸發(fā)可控硅BAT-20對受熱物質(zhì)加熱。移相觸發(fā)雙向可控硅調(diào)壓精準(zhǔn),無級調(diào)壓,較好地融合了超調(diào)和加熱時間之間的矛盾;遙感遙測使用PTR-2000與上位機(jī)通信,在0到100℃范圍內(nèi)可任意設(shè)定、控制水溫。PTR- 2000通信距離遠(yuǎn),準(zhǔn)確率高,PC機(jī)界面實(shí)時顯示溫度曲線,溫度、液位上下限設(shè)定。并具有溫度曲線采樣率設(shè)定、溫度曲線打印功能。
2 硬件設(shè)計(jì)
系統(tǒng)硬件主要由C8051F040單片機(jī)最小系統(tǒng)、PTR2000無線通信模塊、TCA785移相調(diào)壓控制模塊、Ptl00測溫模塊、WDK505測液位模塊等組成。
2.1 C8051F040單片機(jī)最小系統(tǒng)
最小系統(tǒng)以單片機(jī)C8051F04O為核心,包括晶體振蕩電路、復(fù)位電路、抗干擾電路、電壓基準(zhǔn)電路和電源部分。C805lF040單片機(jī)是美國 Cygnal公司生產(chǎn)的完全集成的混合信號系統(tǒng)級芯SoC。它具有64kB Flash、4352BRAM、CAN控制器2.0、兩個串行接口、5個16位定時器、12位A/D轉(zhuǎn)換器、8位A/D轉(zhuǎn)換器及12位D/A轉(zhuǎn)換器等,它內(nèi)部還帶有JTAG接口,使調(diào)試變得非常方便。
2.2 PTR2000無線通信模塊
該器件將接收和發(fā)射合接為一體,工作頻率為國際通用的數(shù)傳頻段433MHz;采用FSK調(diào)制/解調(diào),可直接進(jìn)入數(shù)據(jù)輸入/輸出,抗干擾能力強(qiáng)。該模板塊在內(nèi)部集成了高頻接收、PLL合成、FSK調(diào)制/解調(diào)、參量放大、功率放大、頻道切換等功能。通信距離可以滿足設(shè)計(jì)要求,設(shè)計(jì)電路中將PTR2000的一部分通過MAX232進(jìn)行電平轉(zhuǎn)換后與計(jì)算機(jī)串口連接,另一部分與最小系統(tǒng)連接。
2. 3 TCA 785移相調(diào)壓控制模塊
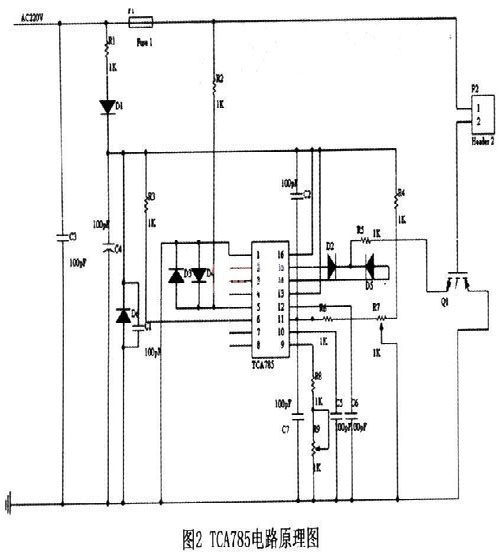
加熱模塊采用移相觸發(fā)集成觸發(fā)器來實(shí)現(xiàn)。觸發(fā)器TCA785過零點(diǎn)的識別能力高,移相范圍更寬,輸出脈沖的整齊度更好,可使受控元件在0V到220V無級改變,常用于對精度要求高,受控環(huán)境惡劣的條件下。移相觸發(fā)是通過改變電壓調(diào)節(jié)導(dǎo)通角來實(shí)現(xiàn)調(diào)壓,負(fù)載兩端的電壓及平均功率是隨移相觸發(fā)角的變化而變化的。在可控硅的每個正或負(fù)的周期中都有保持通、斷的部分,即輸出連續(xù)可調(diào),能適應(yīng)各種性質(zhì)的負(fù)載。本系統(tǒng)為加熱單元設(shè)置了總控開關(guān),上位機(jī)可直接控制開關(guān)的通斷,用燈泡顯示開關(guān)狀態(tài)。其控制原理圖見圖2。
2.4 Ptl00測溫模塊
Ptl00溫度傳感器為正溫度系數(shù)熱敏電阻傳感器,具有抗振動、穩(wěn)定性好、準(zhǔn)確度高、耐高壓等優(yōu)點(diǎn)。鉑熱電阻的線性較好,在0到100℃之間變化時,最大非線性偏差小于0.5℃。鉑熱電阻阻值與溫度關(guān)系為:
![]()
式中,A=0.00390802;B=-0.000000580;其阻值表達(dá)式可近似簡化為:Rpt00=100×(1+At),當(dāng)溫度變化 1℃,Ptl00阻值近似變化0.39 Ω。
2.5 WDK505測液位模塊
采用WDK505壓力變送器測量液位。該儀器具有防結(jié)露、防雷擊設(shè)計(jì),抗干擾能力強(qiáng),長期穩(wěn)定性好等優(yōu)點(diǎn)。芯片置于全不銹鋼殼體內(nèi)堅(jiān)固密封,可靠性好,精度高。
3 軟件設(shè)計(jì)
此系統(tǒng)的主要任務(wù)是對C8051F040芯片的初始化和各種參數(shù)的設(shè)置和通信,并顯示。重點(diǎn)是超調(diào)量控制、溫度控制PID實(shí)現(xiàn)以及上位機(jī)軟件的編寫。
3.1 超調(diào)量控制
實(shí)驗(yàn)表明,水溫控制系統(tǒng)中,采用一般的控制始終具有較大的超調(diào),只能靠自然冷卻,這就使得調(diào)節(jié)時間大大延長。因此,在水溫控制系統(tǒng)中要縮短調(diào)節(jié)時間,就必須做到基本無超調(diào)。通過反復(fù)實(shí)驗(yàn),采用在程序中加入PID算法以及模糊控制方法進(jìn)行溫度控制。實(shí)踐證明,這種控制方式可以加快系統(tǒng)階躍響應(yīng),減小超調(diào)量,并且具有較高的溫度控制精度。
3.2 上位機(jī)軟件
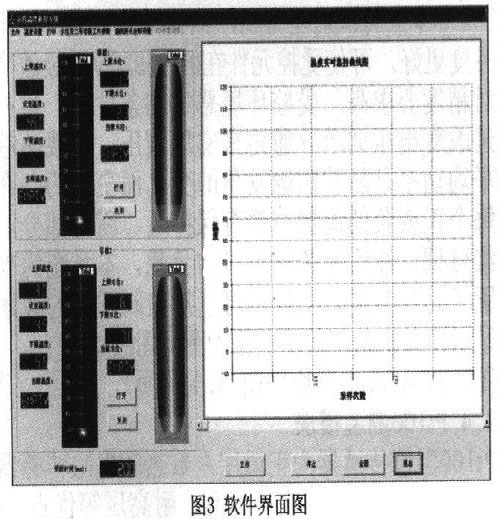
上位機(jī)軟件利用VC++編寫,可以設(shè)置2個通道的上、下限溫度和液位,以及溫度和液位的實(shí)時顯示和溫度隨時間變化曲線。上位機(jī)軟件可以打印溫度曲線,可以全圖打印,也可以局部打印,還可以隨時查看歷史數(shù)據(jù)。其界面如圖3所示。
3.3 溫度控制PID實(shí)現(xiàn)
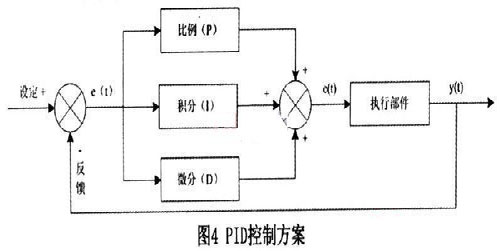
PID控制是控制工程中技術(shù)成熟、應(yīng)用廣泛的一種控制策略,經(jīng)過長期的工程實(shí)踐,已形成了一套完整的控制方法和典型的結(jié)構(gòu)。PID的工作基理是:由于來自外界的各種擾動不斷產(chǎn)生,要想達(dá)到現(xiàn)場控制對象值保持恒定的目的,控制作用就必須不斷地進(jìn)行。若擾動出現(xiàn)使得現(xiàn)場控制對象值發(fā)生變化,現(xiàn)場檢測元件就會將這種變化采集后經(jīng)變送器送至PID控制器的輸入端,并與其給定值進(jìn)行比較得到偏差值,調(diào)節(jié)器按此偏差并以我們預(yù)先設(shè)定的整定參數(shù)控制規(guī)律發(fā)出控制信號,去改變調(diào)節(jié)器的開度,使之增加或減少,從而使現(xiàn)場控制對象值發(fā)生改變,并趨向于給定值,從而達(dá)到控制目的。其實(shí)PID的實(shí)質(zhì)就是對偏差進(jìn)行比例、積分、微分運(yùn)算,根據(jù)運(yùn)算結(jié)果控制執(zhí)行部件的過程。控制方案如圖4所示。
PID控制器的控制規(guī)律可以描述為:

本設(shè)計(jì)利用了上面所介紹的位置式PID算法,將溫度傳感器采樣輸入作為當(dāng)前輸入,然后與設(shè)定值進(jìn)行相減得偏差,再對偏差值進(jìn)行PID運(yùn)算產(chǎn)生輸出結(jié)果,最后控制定時器的時間進(jìn)而控制加熱器。
4 結(jié)束語
溫度遙控遙測是工業(yè)上使用比較多的一種控制技術(shù),本文就是針對溫度遙控遙測所進(jìn)行的探討與實(shí)踐。設(shè)計(jì)采用PID控制算法大大減少超調(diào)量,提高控制精度。由于傳感器和其它器件本身并非理想線性,程序中對實(shí)測數(shù)據(jù)進(jìn)行了線性補(bǔ)償。經(jīng)過大量的實(shí)驗(yàn),觀測數(shù)據(jù),優(yōu)化系統(tǒng),最終得到的實(shí)驗(yàn)結(jié)果精度較高。水溫控制準(zhǔn)確,雙向通信良好,上位機(jī)界面完整、優(yōu)美。希望本文提出的方案能對大家在溫度遙控遙測的設(shè)計(jì)與應(yīng)用方面有所幫助和啟示。