
1 引言
傳統(tǒng)的十字路口交通控制燈,通常是事先經(jīng)過交通流量的調(diào)查,運用統(tǒng)計的方法將兩個方向紅綠燈的延時預(yù)先設(shè)置好,然后實際的變化卻是未知的,所以常常出現(xiàn)綠燈方向幾乎沒有什么車輛,而紅燈方向卻排著長隊等候通過的調(diào)度失控。本文據(jù)此提出模糊智能交通路口指揮調(diào)度控制系統(tǒng)。
2 交通十字路口傳感器的設(shè)置
在十字路口的四個方向(e、s、w、n)的近端j(斑馬線附近)和遠(yuǎn)端y(距斑馬線約100米處)各設(shè)置一個傳感器,分別統(tǒng)計通過該處的車輛數(shù)。如圖1所示。

圖1 傳感器的設(shè)置
近端的傳感器用于記錄綠燈期間通過路口的車輛數(shù)(記為x);遠(yuǎn)端的傳感器用于記錄紅燈期間進(jìn)入路口排隊等候的車輛數(shù)(記為y)。為了簡化運算,可以將兩個相對的方向(n與s、w與e)的x、y值合并為一組,分別取兩個方向之最大者。
3 模糊控制器的設(shè)計
本模糊控制系統(tǒng)設(shè)計的核心是模糊控制器的設(shè)計,設(shè)計模糊控制器主要是求取模糊控制表。
3.1 系統(tǒng)分析
確定控制器的輸入變量和輸出變量以及它們的數(shù)值變化范圍。輸入變量為x、y,輸出變量為t。綠燈期間車輛通過路口的速度不超過20公里/小時,則在15秒時間內(nèi)通過的最大車輛數(shù)約為15輛。則x的變化范圍為0~15。當(dāng)遠(yuǎn)端和近端傳感器之間距離約為100米時,考慮一般車輛車身長度連同兩車輛間距平均5米左右,所以100米內(nèi)可能停留等待的車輛數(shù)最多可達(dá)到100/5=20輛,于是紅燈方向排隊等待的車輛數(shù)y變化范圍為0~20。本系統(tǒng)的輸出就是兩個方向的紅黃綠燈,還有斑馬線處人行橫道的紅綠燈以及按前進(jìn)方向分得更細(xì)的綠燈相互間關(guān)系及兩個方向的輸出關(guān)系最終歸結(jié)到對當(dāng)前綠燈的延時t。根據(jù)現(xiàn)場測試,輸出變量t的變化范圍為15~60。
3.2 模糊化方法的選擇與確定
為了實現(xiàn)模糊控制,需要將綠燈時間分為兩部分:其一是固定的1o秒作為路口車輛狀態(tài)參數(shù)的采集時間t1;其二是根據(jù)兩個方向車輛流量變化進(jìn)行模糊決策的延時t2。綠燈期間車輛通過路口的速度不超過10m/s,則在10s內(nèi)通過的最大車輛數(shù)約為l5。以紅綠燈轉(zhuǎn)換瞬間為計時起點,記錄10s內(nèi)通過的車輛數(shù)作為變量x的論域,取(0-15),并將它分為三個模糊子集:少、中等、多。其從屬函數(shù)設(shè)計如圖2所示。
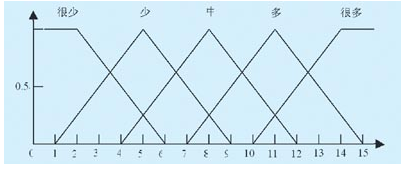
圖2 綠燈期間通過路口車輛數(shù)(x)從屬函數(shù)設(shè)計
紅燈期間排隊等候車輛數(shù)(y)的模糊化, 輸出量模糊分類都采用三角形屬函數(shù)的設(shè)計。
1 引言
傳統(tǒng)的十字路口交通控制燈,通常是事先經(jīng)過交通流量的調(diào)查,運用統(tǒng)計的方法將兩個方向紅綠燈的延時預(yù)先設(shè)置好,然后實際的變化卻是未知的,所以常常出現(xiàn)綠燈方向幾乎沒有什么車輛,而紅燈方向卻排著長隊等候通過的調(diào)度失控。本文據(jù)此提出模糊智能交通路口指揮調(diào)度控制系統(tǒng)。
2 交通十字路口傳感器的設(shè)置
在十字路口的四個方向(e、s、w、n)的近端j(斑馬線附近)和遠(yuǎn)端y(距斑馬線約100米處)各設(shè)置一個傳感器,分別統(tǒng)計通過該處的車輛數(shù)。如圖1所示。
圖1 傳感器的設(shè)置
近端的傳感器用于記錄綠燈期間通過路口的車輛數(shù)(記為x);遠(yuǎn)端的傳感器用于記錄紅燈期間進(jìn)入路口排隊等候的車輛數(shù)(記為y)。為了簡化運算,可以將兩個相對的方向(n與s、w與e)的x、y值合并為一組,分別取兩個方向之最大者。
3 模糊控制器的設(shè)計
本模糊控制系統(tǒng)設(shè)計的核心是模糊控制器的設(shè)計,設(shè)計模糊控制器主要是求取模糊控制表。
3.1 系統(tǒng)分析
確定控制器的輸入變量和輸出變量以及它們的數(shù)值變化范圍。輸入變量為x、y,輸出變量為t。綠燈期間車輛通過路口的速度不超過20公里/小時,則在15秒時間內(nèi)通過的最大車輛數(shù)約為15輛。則x的變化范圍為0~15。當(dāng)遠(yuǎn)端和近端傳感器之間距離約為100米時,考慮一般車輛車身長度連同兩車輛間距平均5米左右,所以100米內(nèi)可能停留等待的車輛數(shù)最多可達(dá)到100/5=20輛,于是紅燈方向排隊等待的車輛數(shù)y變化范圍為0~20。本系統(tǒng)的輸出就是兩個方向的紅黃綠燈,還有斑馬線處人行橫道的紅綠燈以及按前進(jìn)方向分得更細(xì)的綠燈相互間關(guān)系及兩個方向的輸出關(guān)系最終歸結(jié)到對當(dāng)前綠燈的延時t。根據(jù)現(xiàn)場測試,輸出變量t的變化范圍為15~60。
3.2 模糊化方法的選擇與確定
為了實現(xiàn)模糊控制,需要將綠燈時間分為兩部分:其一是固定的1o秒作為路口車輛狀態(tài)參數(shù)的采集時間t1;其二是根據(jù)兩個方向車輛流量變化進(jìn)行模糊決策的延時t2。綠燈期間車輛通過路口的速度不超過10m/s,則在10s內(nèi)通過的最大車輛數(shù)約為l5。以紅綠燈轉(zhuǎn)換瞬間為計時起點,記錄10s內(nèi)通過的車輛數(shù)作為變量x的論域,取(0-15),并將它分為三個模糊子集:少、中等、多。其從屬函數(shù)設(shè)計如圖2所示。
圖2 綠燈期間通過路口車輛數(shù)(x)從屬函數(shù)設(shè)計
紅燈期間排隊等候車輛數(shù)(y)的模糊化, 輸出量模糊分類都采用三角形屬函數(shù)的設(shè)計。
3.3 模糊規(guī)則的設(shè)計
當(dāng)兩個方向的狀態(tài)處于同一量級時,如同為多,或同為中等,或同為少時,綠燈的延時t2均取“短”,如表1所示,其目的是保證雙方流量相差不多的情況下,盡快地均衡疏散。
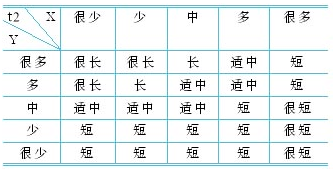
表1 模糊規(guī)則表
3.4 模糊推理算法與解模糊
從模糊規(guī)則得到的結(jié)果仍然是模糊量,還要經(jīng)過模糊推理算法還原為精確量才能輸出。本設(shè)計采用當(dāng)今模糊控制算法的主流算法—簡易模糊推理算法。對于每個確定的輸入x和y值對應(yīng)不同的模糊子集,具有不同的從屬度。由此而激活的多條模糊規(guī)則以取小的策略求出各輸出于模糊集的從屬度,然后再采用重心法(加權(quán)平均法)解模糊,求出t2的精確值:
![]()
式中:μi為確定的x、y輸入值所對應(yīng)的不同模糊子集的從屬度;ti為輸出各模糊子集所對應(yīng)的重心值。
4 系統(tǒng)設(shè)計
4.1 系統(tǒng)硬件設(shè)計
模糊控制器采用三菱的fx2n型plc,通過編程來實現(xiàn)交通調(diào)度過程控制。圖3所示的模糊控制系統(tǒng)數(shù)據(jù)采集及a/d轉(zhuǎn)換由模擬量輸入模塊fx2n-2ad完成,d/a轉(zhuǎn)換由模擬量輸出模塊fx2n-2da完成。
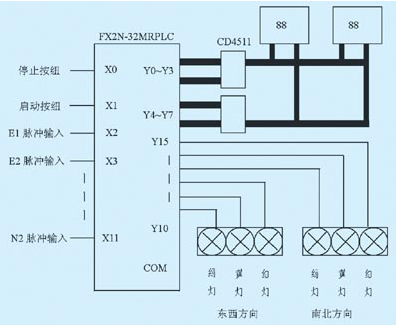
圖3 plc實現(xiàn)模糊控制的硬件連接
其中y10-y12是東西方向紅綠燈的控制線路,y13-y15則是南北方向的控制線路,yo-y7則是控制7段顯示器的控制線路。
4.2 軟件設(shè)計
plc編程能力強(qiáng),可以將模糊化.模糊決策和解模糊方便地用軟件來實現(xiàn),基于交叉路口車輛等待長度的變周期交通模糊控制器模糊判決子程序的算法流程如圖4所示。

首先分別讀入紅綠燈方向檢測區(qū)中各檢測器顯示值,計算最大車輛數(shù)x和y然后將x和y分別乘以量化因子,求得相應(yīng)論域元素表征的查找控制表所需的x和y,并根據(jù)表4模糊控制規(guī)則表查得輸出控制量的論域值t最后將其代入公式15+ki×t, 可計算出實際換向后綠燈的時間長度t。
5 運行測試及結(jié)果分析
本文設(shè)計的基于plc的模糊交通控制系統(tǒng),在某路口經(jīng)過了試運行并現(xiàn)場測試,并與傳統(tǒng)的定時控制方法進(jìn)行了比較(見表2所示),比較結(jié)果表明:在交通流較小或接近定時配時的預(yù)期量時,模糊控制與定時控制方法并無太大差別,而當(dāng)交通量逐漸增大時,本系統(tǒng)的模糊控制的優(yōu)勢就明顯起來,可以有效地減少延誤車隊長和車輛平均延誤時間,其中南北方向和東西方向的平均延誤分別較定時控制的減少6.74%和5.32%。
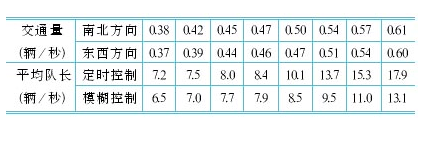
表2 模糊控制與定時控制方案效果比較對照表
6 結(jié)束語
理論與實踐證實,應(yīng)用可編程控制器plc對十字路口交通信號燈進(jìn)行模糊控制,其控制效果要比定周期方法的控制效果明顯,尤其適用在車輛信息量比較大的交叉路口。由于使用plc作為本系統(tǒng)控制器的核心,系統(tǒng)編程簡單。操作方便,具有較好的應(yīng)用推廣價值,適合目前我國交通控制與管理的現(xiàn)狀。