
1 引言
提高薄膜收卷質(zhì)量對(duì)塑料薄膜的二次加工至關(guān)重要;對(duì)于薄而易變形的薄膜的收卷,一個(gè)重要的方面就是要實(shí)現(xiàn)薄膜牽引和卷取過(guò)程當(dāng)中的恒線速度控制。我們建立了牽引和卷取的恒線速度控制圖,構(gòu)成了由計(jì)算機(jī)、可編程控制器、變頻器等組成的硬件系統(tǒng),實(shí)現(xiàn)了計(jì)算機(jī)和可編程控制器、可編程控制器和變頻器之間的通信。
2 恒線速度控制圖的建立
2.1 異步電機(jī)在兩相同步旋轉(zhuǎn)(M、T)坐標(biāo)系中的數(shù)學(xué)模型[1][2]
在同步旋轉(zhuǎn)坐標(biāo)軸系中,電壓方程式可用右式表示:[μ]MT =[Z]MT [ī]MT (1) ,
同步旋轉(zhuǎn)軸系上的數(shù)學(xué)模型為:
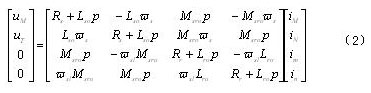
式中 分別為M、T同步旋轉(zhuǎn)軸系的定、轉(zhuǎn)子電壓和電流;ω3 為M、T軸系的同步旋轉(zhuǎn)角速度,即定子頻率角速度;
分別為M、T同步旋轉(zhuǎn)軸系的定、轉(zhuǎn)子電壓和電流;ω3 為M、T軸系的同步旋轉(zhuǎn)角速度,即定子頻率角速度; (轉(zhuǎn)差角頻率)。
(轉(zhuǎn)差角頻率)。
M、T坐標(biāo)軸系的力矩表達(dá)式為:
2.2 異步電機(jī)的狀態(tài)方程[1][2]
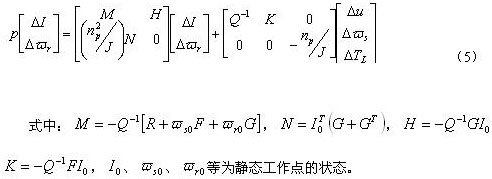
研究一個(gè)三相系統(tǒng)時(shí),采用同步旋轉(zhuǎn)坐標(biāo)軸系,其狀態(tài)方程中的系統(tǒng)矩陣A和輸入矩陣B與θr無(wú)關(guān),可以簡(jiǎn)化求解過(guò)程。如果取定子和轉(zhuǎn)子電流 I(t),轉(zhuǎn)速ωr(t)為狀態(tài)變量,定子電壓μ,頻率ω3(t)及負(fù)載轉(zhuǎn)矩TL(t)輸入量,則異步電機(jī)在同步旋轉(zhuǎn)軸系中的狀態(tài)方程為:


由式(4)可見,即使在同步旋轉(zhuǎn)坐標(biāo)系中,異步電機(jī)調(diào)速系統(tǒng)在一般情況下也是一個(gè)非線性系統(tǒng),應(yīng)用線性多變量系統(tǒng)理論對(duì)式(4)進(jìn)行線性化,可得線性化后的狀態(tài)方程:
2.3 牽引和卷取恒線速度控制系統(tǒng)示意框圖
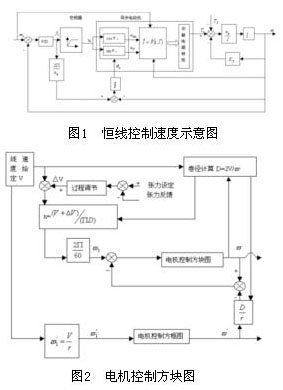
根據(jù)吹塑薄膜牽引和卷取的實(shí)際情況[3][4],可畫出恒線速度控制示意圖,如圖1所示。其中 為角速度計(jì)算值[5],保證電機(jī)按計(jì)算出的卷徑調(diào)節(jié)轉(zhuǎn)速并加入張力調(diào)節(jié)的影響;ω為最終實(shí)際輸出角速度,反饋至卷徑計(jì)算單元參與卷徑計(jì)算。為了鎮(zhèn)定系統(tǒng)的張力,對(duì)△V 部分的運(yùn)算,采用了PI計(jì)算(過(guò)程調(diào)節(jié))。
為角速度計(jì)算值[5],保證電機(jī)按計(jì)算出的卷徑調(diào)節(jié)轉(zhuǎn)速并加入張力調(diào)節(jié)的影響;ω為最終實(shí)際輸出角速度,反饋至卷徑計(jì)算單元參與卷徑計(jì)算。為了鎮(zhèn)定系統(tǒng)的張力,對(duì)△V 部分的運(yùn)算,采用了PI計(jì)算(過(guò)程調(diào)節(jié))。
由異步電機(jī)的狀態(tài)方程可得異步電機(jī)的控制方塊圖,如圖2所示。其中 是異步電機(jī)在同步旋轉(zhuǎn)軸系中的狀態(tài)方程,ω1為給定的定子角頻率,ω為轉(zhuǎn)子角頻率,θμ為定子電壓矢量與t軸的夾角。為了消除穩(wěn)態(tài)誤差,減少速度跟隨誤差,改善系統(tǒng)的動(dòng)態(tài)特性,需加入比例、積分和微分校正環(huán)節(jié)。
是異步電機(jī)在同步旋轉(zhuǎn)軸系中的狀態(tài)方程,ω1為給定的定子角頻率,ω為轉(zhuǎn)子角頻率,θμ為定子電壓矢量與t軸的夾角。為了消除穩(wěn)態(tài)誤差,減少速度跟隨誤差,改善系統(tǒng)的動(dòng)態(tài)特性,需加入比例、積分和微分校正環(huán)節(jié)。
3 系統(tǒng)硬件設(shè)計(jì)
對(duì)于吹塑薄膜自動(dòng)生產(chǎn)線,一方面電機(jī)的數(shù)目較多,另一方面電機(jī)分布距離不是很近。卷取部分的控制系統(tǒng)采用計(jì)算機(jī)為上位機(jī),PLC為下位機(jī)來(lái)實(shí)現(xiàn)對(duì)整個(gè)系統(tǒng)的控制,PLC與變頻調(diào)速器可構(gòu)成多分支通訊控制網(wǎng)絡(luò)[6][7]。利用通信技術(shù),由計(jì)算機(jī)控制PLC,PLC直接控制變頻器完成多電機(jī)調(diào)速,其方法是將通訊模塊集成在變頻器中或利用通訊模塊與PLC連接,通過(guò)通訊接口控制變頻器帶動(dòng)電機(jī)調(diào)速。PLC采用三菱公司的FX2N-64MR-001,變頻器采用三菱公司的FR-A540,編碼器采用增量型編碼器。
計(jì)算機(jī)的通信接口RS232和PLC的通信功能擴(kuò)展板FX2N-485-BD之間通過(guò)RS232C/PLC 變換接口FX2N-485PC-IF連接[8],如圖3示。

PLC和下位器件之間關(guān)系如圖4所示。變頻器的通信連接單元為FR-CU03,符合RS-422/RS-485通信規(guī)范;3MD2系列PLC數(shù)字顯示器可以實(shí)時(shí)的顯示PLC中的數(shù)據(jù)。電機(jī)1、2轉(zhuǎn)速的計(jì)算和比較,張力反饋的PI調(diào)節(jié)等都由PLC來(lái)完成。
由圖3和圖4構(gòu)成整個(gè)控制系統(tǒng)硬件的連接,這樣的連接可以實(shí)現(xiàn)計(jì)算機(jī)對(duì)PLC遠(yuǎn)距離的調(diào)試與監(jiān)控、PLC的離線編程、PLC對(duì)變頻器的遠(yuǎn)距離監(jiān)控等操作,使對(duì)薄膜吹塑生產(chǎn)線的控制更靈活。
4 軟件實(shí)現(xiàn)
考慮到使用的方便,采用基于Windows操作系統(tǒng)的軟件包SWOPC-FXGP/WIN-C,可對(duì)FX全系列可編程控制器(FX0S、 FX2N、FX0N、FX2、FX2C)進(jìn)行編程和控制[9]。這種軟件可以實(shí)現(xiàn)寄存器數(shù)據(jù)的傳送、PLC存儲(chǔ)器清除、串行口設(shè)置(D8120)、運(yùn)行中程序更改、遙控運(yùn)行或停止、PLC診斷、采樣跟蹤和端口設(shè)置等操作;可讀取和顯示可編程控制器中的程序,實(shí)現(xiàn)文件的發(fā)送和接收;可監(jiān)控和測(cè)試可編程控制器,實(shí)現(xiàn)動(dòng)態(tài)監(jiān)視器、元件監(jiān)控和顯示監(jiān)控?cái)?shù)據(jù)的變化值(十六進(jìn)制)等功能;可以實(shí)現(xiàn)梯形圖、指令表和順序功能圖(SFC)程序的相互切換顯示,同時(shí)顯示多個(gè)功能窗口。
要實(shí)現(xiàn)對(duì)薄膜牽引和卷取的恒線速度控制,需要PC與PLC之間點(diǎn)對(duì)點(diǎn)的串行通信和PLC與下位器件之間進(jìn)行正確通信,這需要設(shè)定握手信號(hào)和數(shù)據(jù)傳送格式。為了避免發(fā)送與接收的幀錯(cuò),發(fā)送與接收采用相同的數(shù)據(jù)格式。
4.1 計(jì)算機(jī)和PLC的通信協(xié)議
為了使計(jì)算機(jī)和PLC進(jìn)行正確地通信,必須對(duì)PLC的特殊寄存器作相應(yīng)的設(shè)置[8]。D8120用來(lái)設(shè)置數(shù)據(jù)長(zhǎng)度、校驗(yàn)形式、波特率和協(xié)議方式;D8121用來(lái)設(shè)置站號(hào)(設(shè)置范圍為00H-0FH);D8122和D8123分別存儲(chǔ)待傳送數(shù)據(jù)和已傳送數(shù)據(jù)的長(zhǎng)度;D8124存儲(chǔ)數(shù)據(jù)開始位(初始值:STX);D8125存儲(chǔ)數(shù)據(jù)結(jié)束位(初始值:ETX);……D8129用來(lái)設(shè)置間歇校驗(yàn)時(shí)間。上位機(jī)和PLC的通信協(xié)議有多種格式,我們所使用的專用通信協(xié)議格式4如圖5、6、7所示,圖5和圖6中的和校驗(yàn)碼是從站號(hào)開始到數(shù)據(jù)結(jié)束的所有字節(jié)轉(zhuǎn)化為ASCII碼相加后的末兩個(gè)字節(jié)。
主要控制字符含義如下:ENQ:計(jì)算機(jī)的請(qǐng)求信號(hào)(05H);ACK:無(wú)校驗(yàn)錯(cuò)誤,PLC的應(yīng)答信號(hào)(06H);NAK:檢驗(yàn)到錯(cuò)誤時(shí),PLC的應(yīng)答信號(hào)(15H);STX:信息幀開始標(biāo)志(02H);ETX:信息幀結(jié)束標(biāo)志(03H);ETO:傳輸結(jié)束(04H);LF:數(shù)據(jù)供給(0AH);CL:清空初始化(0CH);CR:傳輸再次開始(0DH)。


4.2 PLC與變頻器之間的通信協(xié)議
在PLC與變頻器構(gòu)成的1:2通信網(wǎng)絡(luò)中,每個(gè)變頻器為一個(gè)子站,其站號(hào)由參數(shù)設(shè)定單元設(shè)定。工作過(guò)程中,PLC通過(guò)FX2N-485-BD發(fā)有關(guān)命令信息后,各個(gè)子站均收到該信息,然后每個(gè)子站判斷該信息的站號(hào)地址是否與本站站號(hào)一致。若一致則處理該信息并返回應(yīng)答信息;若不一致則放棄該信息的處理。這樣就保證了在網(wǎng)絡(luò)上同時(shí)只有一個(gè)子站與主站交換信息。通信協(xié)議仍采用專用通信協(xié)議格式4,如圖5、6、7所示。
4.3 PLC程序組成
PLC程序主要由主程序模塊,通信組織子程序,接收數(shù)據(jù)幀處理子程序,發(fā)送數(shù)據(jù)幀處理子程序,電機(jī)速度的計(jì)算和比較、卷徑計(jì)算子程序,故障處理子程序等組成。與PLC和PC機(jī)通信有關(guān)的主要功能指令如圖8所示。
5 結(jié)論
本控制系統(tǒng)應(yīng)用于吹塑薄膜生產(chǎn)線的牽引和卷取控制,避免了由于牽引速度和卷繞速度不同步而造成的薄膜在牽引輥上自卷或者薄膜厚度達(dá)不到要求等問(wèn)題,使生產(chǎn)更加穩(wěn)定,提高了薄膜收卷質(zhì)量。