
引 言
R,L,C是電子電路及系統(tǒng)的主要元件,R,L,C參數(shù)的測(cè)量方法有電橋法、諧振法、伏安法。伏安法測(cè)量中,有固定軸法和自由軸法兩種,固定軸法要求相敏檢波器的相位參考基準(zhǔn)嚴(yán)格地與標(biāo)準(zhǔn)阻抗電壓的相位相同,對(duì)硬件要求很高,并且存在同相誤差,已很少使用。自由軸法中相敏檢波器的相位參考基準(zhǔn)可以任意選擇,只要求保持兩個(gè)坐標(biāo)軸準(zhǔn)確正交(相差90°),從而使硬件電路簡(jiǎn)化。常見的自由軸法RLC測(cè)試儀采用模擬相敏檢波器,測(cè)量精度低,速度慢。本文介紹一種基于數(shù)字鑒相的自由軸法RLC測(cè)量電路設(shè)計(jì)。
1 系統(tǒng)組成及測(cè)量原理
基于數(shù)字鑒相的自由軸法RLC測(cè)量系統(tǒng)構(gòu)成如圖1所示,主要由正弦信號(hào)源U0、前端測(cè)量電路、相敏檢波器、A/D轉(zhuǎn)換器、微處理器、基準(zhǔn)相位發(fā)生器以及鍵盤、顯示電路等組成。

為了提高信號(hào)源精度,正弦信號(hào)源U0采用直接數(shù)字頻率合成信號(hào)源(DDS)。R0為信號(hào)源內(nèi)阻,RS是標(biāo)準(zhǔn)電阻,Zx為被測(cè)阻抗,A為高輸入阻抗、高增益放大器,主要完成電流一電壓變換功能。測(cè)量時(shí),開關(guān)S通過程控置于Ux或US端。由圖1有:UX=IOZX,US=-IORS,被測(cè)阻抗ZX為:
由式(1)可知,只要測(cè)出UX,US在直角坐標(biāo)系中兩坐標(biāo)軸x,y上的投影分量,經(jīng)過四則運(yùn)算,即可求出測(cè)量結(jié)果。
圖1中,被測(cè)信號(hào)與相位參考基準(zhǔn)信號(hào)經(jīng)過相敏檢波器后,輸出就是被測(cè)信號(hào)在坐標(biāo)軸上的投影分量。相位參考基準(zhǔn)代表著坐標(biāo)軸的方向,為了得到每一被測(cè)電壓(US或UX)在兩坐標(biāo)軸上的投影分量,基準(zhǔn)相位發(fā)生器需要提供兩個(gè)相位相差90°的相位參考基準(zhǔn)信號(hào)。需要指出的是在自由軸法中,相位參考基準(zhǔn)與US沒有確定關(guān)系,可以任意選擇,即x,y坐標(biāo)軸可以任意選擇,只需保持兩坐標(biāo)軸準(zhǔn)確正交90°。UX,US和坐標(biāo)軸的關(guān)系如圖2所示。
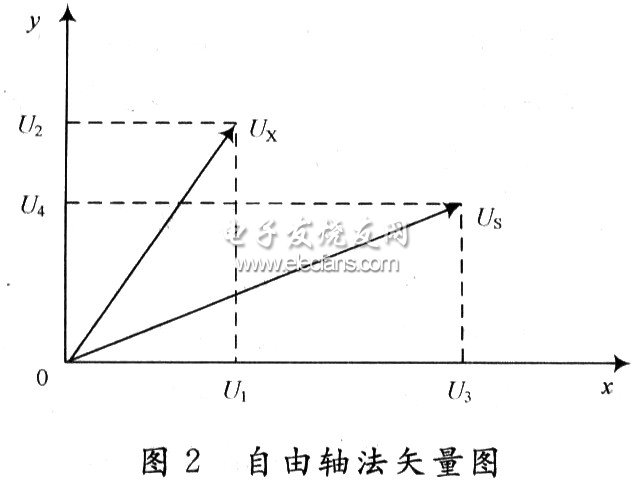
應(yīng)用圖1測(cè)量時(shí),通過開關(guān)S選擇某一被測(cè)量(如UX),基準(zhǔn)相位發(fā)生器依次送出兩個(gè)相位相差90°的相位參考基準(zhǔn)信號(hào),經(jīng)相敏檢波器后分別得到UX在兩坐標(biāo)軸上的投影分量U1,U2。類似,當(dāng)開關(guān)S選擇US時(shí),可分別得到US在兩坐標(biāo)軸上的投影分量U3,U4。各投影分量經(jīng)A/D轉(zhuǎn)換器可得對(duì)應(yīng)的數(shù)字量,再經(jīng)微處理器計(jì)算便得到被測(cè)元件參數(shù)值。
下面以電容并聯(lián)電路的測(cè)量為例,推導(dǎo)RLC參數(shù)的數(shù)學(xué)模型。
由圖2可得:

式中:Ni為Ui對(duì)應(yīng)的數(shù)字量,e為A/D轉(zhuǎn)換器的刻度系數(shù),即每個(gè)數(shù)字所代表的電壓值。
由式(2),式(3)可知:
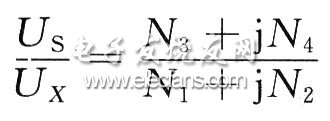

直接通過對(duì)N1~N4數(shù)值的運(yùn)算,即可完成矢量除法運(yùn)算。
由式(1),式(4)可求得被測(cè)阻抗中的電容值CX及損耗角正切值DX。
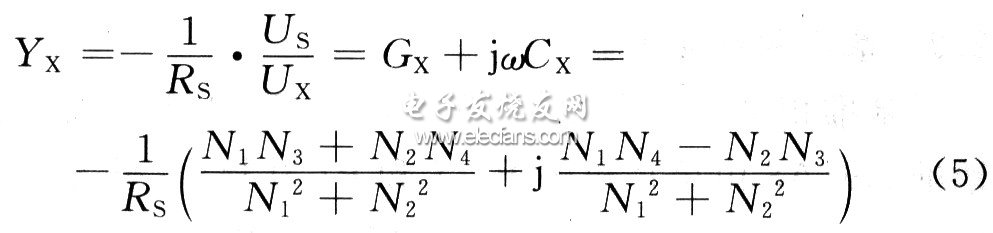
式中:GX為介質(zhì)損耗電導(dǎo)。
進(jìn)而有:

同理可以導(dǎo)出被測(cè)參數(shù)R,C的計(jì)算公式。
2 正弦信號(hào)源與相敏檢波器
在自由軸法測(cè)量RLC原理電路(圖1)中,正弦信號(hào)發(fā)生器、相敏檢波器及基準(zhǔn)相位發(fā)生器是RLC測(cè)量?jī)x的關(guān)鍵部分。
2.1 正弦信號(hào)源
為了保證RLC測(cè)試儀的精度,要求信號(hào)源U0產(chǎn)生的正弦信號(hào)波形失真小,幅值穩(wěn)定。自由軸法中,還要求信號(hào)源頻率和相敏檢波器相位基準(zhǔn)信號(hào)的頻率相同。所以正弦信號(hào)源與基準(zhǔn)相位發(fā)生器在電路上密切相關(guān)。為了保證測(cè)試精度,采用直接數(shù)字頻率合成DDS技術(shù)產(chǎn)生正弦信號(hào)激勵(lì)源。DDS具有系統(tǒng)穩(wěn)定性強(qiáng),以及相位、頻率精確可調(diào)的優(yōu)點(diǎn)。圖3所示為采用DDS的正弦信號(hào)源及相敏檢波器原理圖。
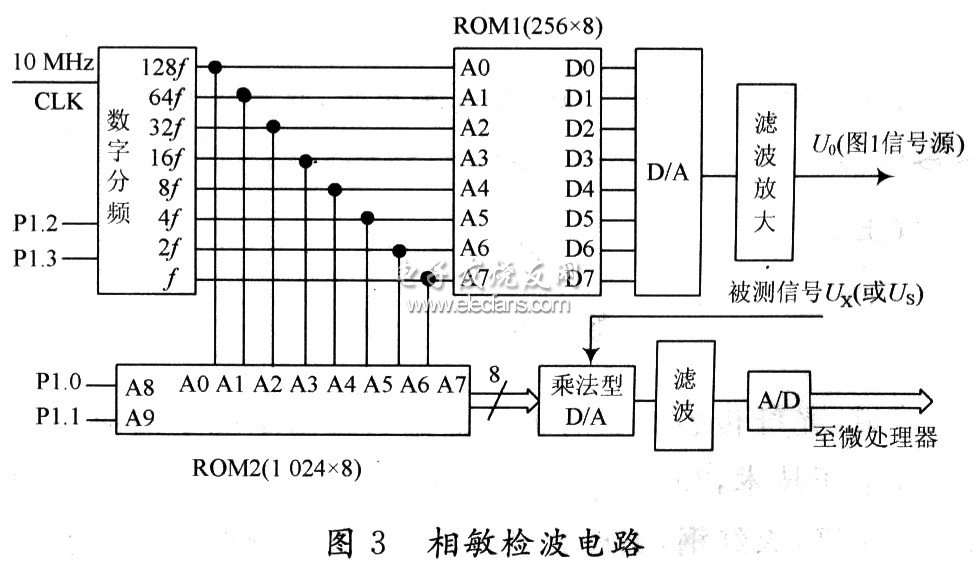
圖3中時(shí)鐘信號(hào)CLK經(jīng)分頻器后,得到依次二倍頻率關(guān)系的8路信號(hào),作為ROM1的地址輸入,ROM1存放有256個(gè)按正弦規(guī)律變化的數(shù)據(jù),即每一個(gè)存儲(chǔ)單元存儲(chǔ)的樣點(diǎn)數(shù)據(jù)與其地址之間的關(guān)系和正弦波的幅值與時(shí)間軸的關(guān)系一致。在分頻器輸出8路信號(hào)作用下,ROM1依次輸出正弦曲線樣點(diǎn)數(shù)據(jù),經(jīng)D/A轉(zhuǎn)換器后輸出階梯正弦波,再經(jīng)濾波、放大,就得到了測(cè)試用的正弦激勵(lì)信號(hào)。信號(hào)基礎(chǔ)頻率由單片機(jī)的P1.2和P1.3控制,若P1.2,P1.3分別為00,10,01,則基礎(chǔ)頻率廠依次為100 Hz,1 kHz,10 kHz。2.2 基準(zhǔn)相位發(fā)生器
基準(zhǔn)相位發(fā)生器由ROM2實(shí)現(xiàn),ROM2的高兩位地址A9,A8由單片機(jī)的P1.1和P1.0提供,低8位地址A7~A0與ROM1地址對(duì)應(yīng)相連。ROM2分為4個(gè)區(qū),每區(qū)有64個(gè)數(shù)據(jù),分別代表了4組相差90°的正弦波信號(hào)值。由P1.0,P1.1選擇不同的區(qū)域。當(dāng)P1.1,P1.0分別為00,01,10,111,ROM2依次輸出相位相差90°的正弦信號(hào)(相位參考基準(zhǔn)信號(hào))。
2.3 相敏檢波器
相敏檢波器由乘法型D/A轉(zhuǎn)換器和低通濾波器構(gòu)成。乘法型D/A轉(zhuǎn)換器用于實(shí)現(xiàn)數(shù)字鑒相。ROM2輸出的8位數(shù)字式基準(zhǔn)正弦信號(hào)送到8位乘法型D/A轉(zhuǎn)換器,與加至D/A轉(zhuǎn)換器參考電壓VREF端的被測(cè)電壓UX(或US)相乘,再經(jīng)低通濾波便得到被測(cè)信號(hào)UX(或US)在坐標(biāo)軸上的投影分量。分析如下,先使P1.1,P1.0=00,設(shè)ROM2輸出正弦信號(hào)為cos(ωt),被測(cè)信號(hào)UX=Umcos(ωt+ψ),經(jīng)乘法型D/A后輸出為:
再經(jīng)低通濾波器后輸出為Umcosψ,它是被測(cè)信號(hào)UX在x坐標(biāo)軸上的投影。然后使P1.1,P1.0=01,實(shí)現(xiàn)90°移相操作,此時(shí)ROM2輸出為cos(ωT+π/2),被測(cè)信號(hào)UX仍然為Umcos(ωt+ψ),D/A轉(zhuǎn)換器輸出為:

經(jīng)低通濾波可以得到UX在y坐標(biāo)軸上的投影分量Umsin ψ信號(hào)。
同理,可以得到US在x,y坐標(biāo)軸上的投影分量。
3 結(jié) 語
本電路通過乘法型D/A轉(zhuǎn)換器進(jìn)行數(shù)字鑒相,減少了傳統(tǒng)模擬鑒相器開關(guān)動(dòng)作過程中出現(xiàn)的尖脈沖,提高了測(cè)量精度;兩個(gè)相互垂直的相位參考基準(zhǔn)信號(hào)通過ROM2準(zhǔn)確獲得,相位參考基準(zhǔn)信號(hào)電路比模擬相敏檢波器大大簡(jiǎn)化;此外鑒相器使用D/A轉(zhuǎn)換器后電路的溫度系數(shù)進(jìn)一步減小。