
1 引言
隨著電池的容量確實(shí)得到了大幅度增加,伴隨著也產(chǎn)生了一個(gè)新的問題——如果智能手機(jī)和平板電腦在應(yīng)用過程中發(fā)生軟件系統(tǒng)卡機(jī)的情況,如何進(jìn)行系統(tǒng)的復(fù)位操作?
與產(chǎn)品的主要功能相比,解除卡機(jī)狀況的機(jī)械復(fù)位裝置通常比較落后。為防止設(shè)備意外復(fù)位,大多數(shù)手動(dòng)復(fù)位鍵(如果有的話)都掩藏在機(jī)身內(nèi)。因?yàn)閺?fù)位鍵很難觸及,所以拆卸電池成為非常普遍的解決辦法。但是,這種做法不僅用戶感受度較差,并且增加了成本,還可能會(huì)損壞系統(tǒng),例如,使重要的數(shù)據(jù)丟失。
那么,在內(nèi)置電池設(shè)計(jì)的智能手機(jī)和平板電腦中,如何進(jìn)行系統(tǒng)的硬件復(fù)位呢?本文介紹了一種硬件智能復(fù)位的解決方案,不僅可以在智能手機(jī)和平板電腦設(shè)計(jì)中實(shí)現(xiàn)雙鍵長(zhǎng)按的智能復(fù)位,還可以實(shí)現(xiàn)在智能手機(jī)和平板電腦中流行的單鍵開/關(guān)機(jī)和復(fù)位的智能方案。
本文首先介紹了智能手機(jī)和平板電腦平臺(tái)上AP+PMU硬件架構(gòu)的復(fù)位機(jī)制和存在的隱患,然后闡述了采用意法半導(dǎo)體STM6513和STM6519智能復(fù)位芯片,實(shí)現(xiàn)雙鍵長(zhǎng)按復(fù)位,特別是在智能手機(jī)和平板電腦中流行的單鍵開/關(guān)機(jī)和復(fù)位的智能方案。
2 智能手機(jī)和平板電腦應(yīng)用平臺(tái)的開/關(guān)機(jī)和復(fù)位的機(jī)制和隱患
在當(dāng)今智能手機(jī)和平板電腦的主流平臺(tái)中,通常都存在應(yīng)用處理器(Application Process / Baseband, 下簡(jiǎn)稱AP)加電源管理芯片(Power Management Unit, 下簡(jiǎn)稱PMU)的架構(gòu),如圖1所示。
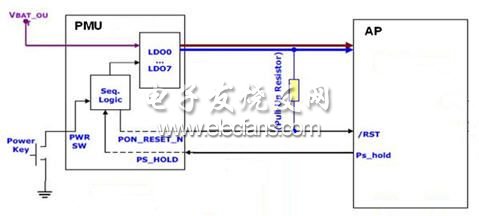
圖1. 智能手機(jī)和平板電腦中AP + PMU的硬件架構(gòu)
在這種硬件架構(gòu)中,在PMU上設(shè)置有一個(gè)電源開關(guān)管腳與一個(gè)機(jī)身上的一個(gè)機(jī)械開關(guān)相連(下簡(jiǎn)稱Power_Key)。
當(dāng)手機(jī)處于關(guān)機(jī)狀態(tài)的時(shí)候,按下Power_Key將PMU的電源開關(guān)管腳拉到地,將啟動(dòng)PMU上電過程:PMU啟動(dòng)LDO為AP供電,同時(shí)發(fā)出硬件復(fù)位信號(hào)給AP,當(dāng)AP軟件系統(tǒng)啟動(dòng)完畢后,回送一個(gè)PS_HOLD信號(hào)將PMU的PS_HOLD管腳拉高,并且在工作狀態(tài)一直維持為高電平;如果在一定的時(shí)間內(nèi)(Tpshold時(shí)間),AP沒有能將PS_HOLD管腳拉高,則表明AP啟動(dòng)失敗,PMU自動(dòng)進(jìn)行下電過程。通常要求Power_Key和PS_HOLD信號(hào)之間存在一定的關(guān)系,即Power_Key信號(hào)必須保持為低電平直至PS_HOLD信號(hào)被AP驅(qū)動(dòng)為高,如圖2所示。這是因?yàn)椋绻l(fā)生了AP上電初始化失敗而沒能在設(shè)置的時(shí)間Tpshold內(nèi)將PS_HOLD信號(hào)拉高,Power_Key仍然維持為低能夠確保PMU將被觸發(fā)再一次上電過程,從而確保上電成功。
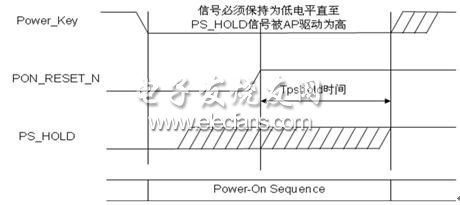
圖2. PMU的Power_Key和PS_HOLD信號(hào)的時(shí)序關(guān)系
當(dāng)手機(jī)處于開機(jī)狀態(tài)的時(shí)候,按下Power_Key將PMU的電源開關(guān)管腳拉到地,PMU將發(fā)送中斷給AP,AP將根據(jù)中斷請(qǐng)求進(jìn)行響應(yīng),將PS_HOLD管腳拉到地,PMU自動(dòng)進(jìn)行下電過程。
在這個(gè)機(jī)制中,存在一個(gè)顯見的隱患:當(dāng)AP的系統(tǒng)軟件卡機(jī)的時(shí)候,它將無法響應(yīng)PMU發(fā)送的下電中斷請(qǐng)求,也就無法進(jìn)行關(guān)機(jī)或復(fù)位操作了。可能的解決方法如下:在PMU的PS_HOLD管腳輸入端設(shè)置一個(gè)按鍵開關(guān)S1,當(dāng)S1被按下,PS_HOLD信號(hào)被拉低到地,觸發(fā)PMU的下電過程,如圖3所示。
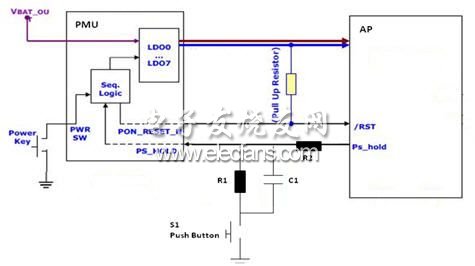
圖3. AP + PMU的硬件架構(gòu)中的手工復(fù)位方案
這個(gè)方案固然可行,但是需要將S1隱藏在不易觸發(fā)的小孔中,平時(shí)用戶是不能夠觸碰這個(gè)復(fù)位開關(guān)S1的。除了用戶感受不好和增加了設(shè)計(jì)成本與風(fēng)險(xiǎn)外,這個(gè)方案還存在一個(gè)問題——當(dāng)下流行的智能手機(jī)或平板電腦的設(shè)計(jì)只有一個(gè)機(jī)械按鍵,也就是連接到PMU電源開關(guān)管腳的開關(guān)Power_Key。在這種設(shè)計(jì)中,Power_Key和S1是不能夠設(shè)置在一起的。原因如圖4所示。
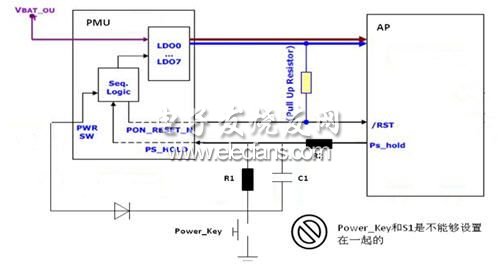
圖4. AP + PMU的硬件架構(gòu)中開/關(guān)機(jī)按鍵和復(fù)位按鍵不能合二為一的原理圖
當(dāng)系統(tǒng)處于關(guān)機(jī)狀態(tài)時(shí),如果Power_Key被短按,PMU將觸發(fā)上電過程,當(dāng)AP上電啟動(dòng)完畢后將PS_HOLD信號(hào)拉高——此時(shí)不管按鍵是按下還是松開的狀態(tài),PMU的PS_HOLD都可以在Tpshold時(shí)間內(nèi)經(jīng)過R2/C1/R1被及時(shí)拉高,系統(tǒng)上電成功不存在問題。當(dāng)系統(tǒng)處于開機(jī)工作狀態(tài)時(shí),如果Power_Key被按下,由于PS_HOLD信號(hào)立即被拉低,PMU將進(jìn)入下電過程。按鍵釋放的時(shí)刻,系統(tǒng)可能處于下電過程或者上電過程的某個(gè)階段,最終導(dǎo)致有可能關(guān)機(jī)和有可能系統(tǒng)復(fù)位的不可以預(yù)測(cè)的結(jié)果,這是產(chǎn)品設(shè)計(jì)所不可以接受的,如圖5所示。更重要的是,采用這樣的設(shè)計(jì),系統(tǒng)也就根本無法實(shí)現(xiàn)軟件關(guān)機(jī)功能了。所以,在這種電路設(shè)計(jì)中,Power_Key和S1是不能夠設(shè)置在一起的。
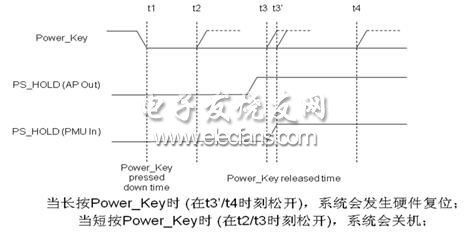
圖5. AP + PMU的硬件架構(gòu)中開/關(guān)機(jī)按鍵和復(fù)位按鍵不能合二為一的時(shí)序
為了校正PMU自身沒有專門的硬件復(fù)位輸入管腳,而需要借助PS_HOLD信號(hào)拉低進(jìn)行復(fù)位的這個(gè)缺陷,新的PMU中開始引入了專門的RESET_IN的復(fù)位管腳,允許外部電路通過這個(gè)管腳硬件復(fù)位PMU。但是,這里仍然存在的問題是——PMU的規(guī)格要求開/關(guān)機(jī)按鍵和復(fù)位按鍵必須在物理上分開,不能設(shè)置在同一個(gè)按鍵上,需要將復(fù)位按鍵隱藏在機(jī)身上的檢修孔中,無法實(shí)現(xiàn)單鍵開/關(guān)機(jī)和復(fù)位的方案。
那么,有沒有一個(gè)硬件方案能夠使開/關(guān)機(jī)按鍵和復(fù)位按鍵合二為一,實(shí)現(xiàn)智能手機(jī)和平板電腦設(shè)計(jì)中的單鍵開/關(guān)機(jī)和復(fù)位的智能方案呢?
3 智能手機(jī)和平板電腦設(shè)計(jì)中的單鍵開/關(guān)機(jī)和復(fù)位智能方案
意法半導(dǎo)體STM65xx系列智能復(fù)位芯片系列有兩個(gè)或者一個(gè)輸入,可以連接設(shè)備上的兩個(gè)或者一個(gè)功能鍵。如果這兩個(gè)鍵被同時(shí)或單個(gè)鍵被按住一定時(shí)間(時(shí)間長(zhǎng)短可以設(shè)置或根據(jù)型號(hào)進(jìn)行選擇),復(fù)位芯片將向主處理器發(fā)送一個(gè)復(fù)位信號(hào)。復(fù)位芯片的兩個(gè)或者一個(gè)輸入和延時(shí)設(shè)定功能,使按鍵的“普通功能”和按鍵的“系統(tǒng)復(fù)位功能”合二為一,同時(shí)能有效地防止設(shè)備被意外復(fù)位。
在智能手機(jī)和平板電腦設(shè)計(jì)中,當(dāng)下流行單鍵開/關(guān)機(jī)和復(fù)位的設(shè)計(jì),即整個(gè)機(jī)身上只有一個(gè)機(jī)械按鍵,該按鍵盤承載了開/關(guān)機(jī)和卡機(jī)復(fù)位的功能。STM65xx智能復(fù)位芯片系列中的STM6513能夠非常圓滿地實(shí)現(xiàn)這個(gè)功能。設(shè)計(jì)者只要將STM6513的SR0和SR1輸入管腳可以連接在Power_Key上(需要雙鍵長(zhǎng)按復(fù)位的設(shè)計(jì),則只需要將/SR0和/SR1分別連接到不同的功能按鍵上即可),/RST2連接到AP的復(fù)位輸入管腳,而RST1連接到PMU的PS_HOLD管腳上,這樣就可以輕松地實(shí)現(xiàn)智能手機(jī)和平板電腦設(shè)計(jì)中的單鍵開/關(guān)機(jī)和復(fù)位的智能方案,如圖6所示的方案1。
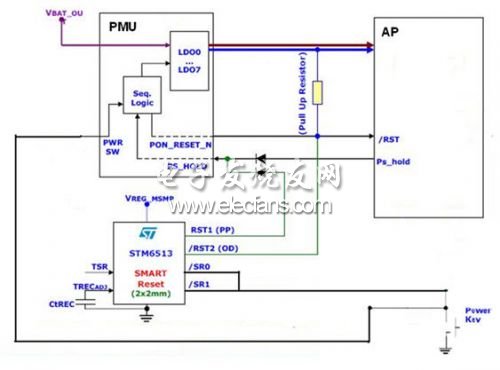
圖6. 采用STM6513的單鍵開/關(guān)機(jī)和復(fù)位的智能方案1
當(dāng)系統(tǒng)處于關(guān)機(jī)狀態(tài)時(shí),如果Power_Key被短按,PMU將觸發(fā)上電過程,當(dāng)AP上電啟動(dòng)完畢后將PS_HOLD信號(hào)拉高,系統(tǒng)上電成功不存在問題。由于設(shè)計(jì)中Power_Key被短按,不會(huì)觸發(fā)STM6513的延時(shí)復(fù)位功能(可選,例如8秒鐘)。
當(dāng)系統(tǒng)處于開機(jī)工作狀態(tài)時(shí),如果Power_Key被按下,超過一個(gè)的時(shí)間(可選,例如8秒鐘),/RST2輸出低電平有效的復(fù)位信號(hào)給AP,同時(shí)RST1管腳輸出高電平信號(hào)。由于PMU 的PS_HOLD輸入管腳上兩個(gè)二極管組成的線與功能電路的存在,在AP進(jìn)行復(fù)位的時(shí)候,STM6513輸出的RST1將保持為高(RST1的trec,可以根據(jù)需要通過STM6513的外接電容管腳進(jìn)行設(shè)置),直到AP將PS_HOLD管腳驅(qū)動(dòng)為高。這樣一來,在進(jìn)行系統(tǒng)復(fù)位的時(shí)候,只是AP被STM6513進(jìn)行了復(fù)位,而PMU實(shí)際沒有下電過程,可以確保系統(tǒng)復(fù)位成功。另外,由于系統(tǒng)復(fù)位過程中PMU沒有下電,緩存數(shù)據(jù)不丟失,還可以實(shí)現(xiàn)死機(jī)時(shí)用戶應(yīng)用數(shù)據(jù)保存的功能。
有些設(shè)計(jì)者可能傾向于在系統(tǒng)重啟過程中,PMU也能夠進(jìn)行重啟。對(duì)于這類設(shè)計(jì)者,也可以只使用STM6513的/RST2管腳連接到PMU的PS_HOLD管腳上(對(duì)于存在RESET_IN的PMU,可以連接在RESET_IN管腳上),如圖7所示的方案2。當(dāng)系統(tǒng)處于開機(jī)工作狀態(tài)時(shí),如果Power_Key被按下,超過一個(gè)的時(shí)間(可選,例如8秒鐘),/RST2輸出低電平有效的復(fù)位信號(hào)將PMU的PS_HOLD信號(hào)拉低。由于/RST2的trec為固定的(例如210ms),也就是說,/RST2在復(fù)位信號(hào)維持210ms低電平之后將后變?yōu)檩敵龈咦锠顟B(tài),從而釋放了PMU的PS_HOLD信號(hào),PMU的PS_HOLD將完全由AP的PS_HOLD輸出管腳的狀態(tài)控制。由于此時(shí)Power_Key仍然為低電平,PMU將被觸發(fā)再一次的上電過程,最終上電成功。

圖7. 采用STM6513的單鍵開/關(guān)機(jī)和復(fù)位的智能方案2對(duì)于采用方案2的設(shè)計(jì)者,一個(gè)成本更優(yōu)的方案是采用意法半導(dǎo)體公司新推出的STM6519芯片,該芯片是單鍵延時(shí)復(fù)位芯片,復(fù)位延遲時(shí)間通過型號(hào)選擇,只有一個(gè)/RST復(fù)位輸出信號(hào),采用UDFN6或UDFN4 1.0x1.45mm封裝,如圖8所示。
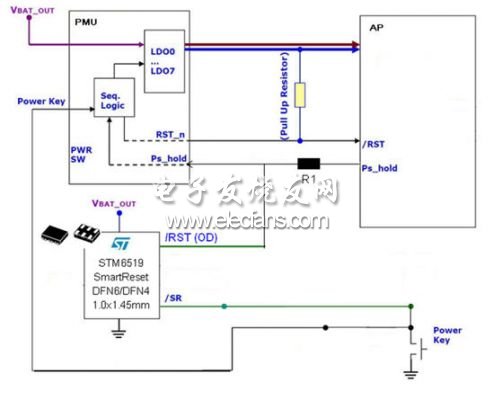
圖8. 采用STM6519的單鍵開/關(guān)機(jī)和復(fù)位的智能方案
采用意法半導(dǎo)體STM6513或STM6519智能復(fù)位產(chǎn)品,都可以實(shí)現(xiàn)以下單鍵開/關(guān)機(jī)和系統(tǒng)復(fù)位過程:
在關(guān)機(jī)狀態(tài),短按鍵,上電開機(jī);在開機(jī)工作狀態(tài),在AP系統(tǒng)軟件沒有卡機(jī)的前提下,短按鍵,AP對(duì)應(yīng)在顯示屏上顯示“返回?關(guān)機(jī)?”供用戶選擇——如果確認(rèn)返回,則返回;如果確認(rèn)關(guān)機(jī),則AP將PS_HOLD拉低,PMU進(jìn)入下電過程,最后關(guān)機(jī)。在AP系統(tǒng)軟件卡機(jī)的情況下,長(zhǎng)按鍵(可選,例如8秒鐘),系統(tǒng)進(jìn)行硬件復(fù)位,重啟開機(jī)。
4 小結(jié)
意法半導(dǎo)體公司STM65xx智能復(fù)位芯片系列使產(chǎn)品設(shè)計(jì)人員能夠去除傳統(tǒng)復(fù)位鍵以及機(jī)身上隱藏復(fù)位鍵的檢修孔,不僅節(jié)省了成本,降低了設(shè)計(jì)風(fēng)險(xiǎn),并且提升了用戶使用滿意度。