
在使用相移顯微干涉法對(duì)MEMS/NEMS結(jié)構(gòu)表面進(jìn)行測(cè)量時(shí),先通過(guò)驅(qū)動(dòng)電路驅(qū)動(dòng)參考鏡產(chǎn)生次波長(zhǎng)量級(jí)的光程變化,,即可由電荷耦合器件攝像機(jī)(CCD)和圖像采集卡獲得一組時(shí)間序列上的相關(guān)干涉圖像,,然后由干涉圖的光強(qiáng)信息解算出被測(cè)表面的相位值,提取包裹的相位信息,,最后通過(guò)一定的相位解包裹算法得到被測(cè)表面真實(shí)的相位信息和相應(yīng)的表面高度,,從而得到被測(cè)結(jié)構(gòu)表面的3-D輪廓[5-6]。由此可見(jiàn),,相位解包裹,,也就是相位展開(kāi)是微結(jié)構(gòu)表面3-D輪廓測(cè)量中至關(guān)重要的一步.用于相位展開(kāi)的方法很多,但通常都具有很強(qiáng)的針對(duì)性和局限性.而微納結(jié)構(gòu)的表面輪廓復(fù)雜,,并且經(jīng)常含有孔洞,、溝槽、突起等特征形狀,,傳統(tǒng)的解包裹算法不能繞過(guò)這些非理想數(shù)據(jù)區(qū)域,,并且導(dǎo)致的誤差會(huì)在被測(cè)面內(nèi)傳播,以致影響整個(gè)相位展開(kāi)的結(jié)果,。這里提出一種基于模板的廣度優(yōu)先搜索的相位解包裹方法,,它通過(guò)模板的使用來(lái)剔除對(duì)相位展開(kāi)有影響的非理想數(shù)據(jù)區(qū)域,使解包裹算法能夠繞過(guò)這些區(qū)域進(jìn)行,,從而得到比較可靠的結(jié)果,。
1 基于模板的相位解包裹
1.1 相位解包裹
通過(guò)相位提取算法,包含在光強(qiáng)中的代表被測(cè)物表面高度信息的相位值被提取出來(lái),。但在實(shí)際測(cè)量中,,由于物體表面高度的相位變化通常都遠(yuǎn)遠(yuǎn)超出一個(gè)波長(zhǎng)周期。因此,各種相位提取算法計(jì)算出來(lái)的相位值均是以反正切函數(shù)的形式表示,,即得到的相位分布被截?cái)喑蔀槎鄠€(gè)2π范圍內(nèi)變化的區(qū)域,,形成包裹相位。為最終得到被測(cè)表面真實(shí)的高度信息,,必須將多個(gè)截?cái)嘞辔坏膮^(qū)域拼接展開(kāi)成連續(xù)相位,,這個(gè)過(guò)程稱為相位解包裹,或相位展開(kāi)[6],。干涉測(cè)量中要求相鄰兩像素點(diǎn)的相位差小于2π,,否則無(wú)法恢復(fù)其真實(shí)相位。當(dāng)滿足這個(gè)要求時(shí),,真實(shí)相位的差值則與包裹相位間差值再進(jìn)行包裹運(yùn)算W2的結(jié)果相等,,即:
Δφ(n) = W2{ΔW1[φ(n)]} (n =1,2,,…,,N) (1)
式中Δ為差值運(yùn)算,φ(n)是第n個(gè)像素點(diǎn)對(duì)應(yīng)其包裹相位W1[φ(n)]的真實(shí)相位,,N為像素點(diǎn)數(shù),。因此,通過(guò)對(duì)包裹的反正切函數(shù)主值差進(jìn)行求和運(yùn)算即可實(shí)現(xiàn)相位展開(kāi)[7]:
φ(m) =φ(0)+∑mn=1W2{ΔW1[φ(n)]}(2)
MEMS/NEMS表面3-D輪廓測(cè)量針對(duì)的通常都是連續(xù)變化的結(jié)構(gòu)表面,,符合相鄰像素點(diǎn)相位差小于2π的要求,,因此依據(jù)式(2)所示的原理即可逐點(diǎn)實(shí)現(xiàn)相位展開(kāi)。
1.2 基于模板的相位解包裹
隨著相位展開(kāi)技術(shù)的深入發(fā)展,,相位解包裹算法層出不窮[7-8],。如果僅僅應(yīng)用于簡(jiǎn)單區(qū)域(未展開(kāi)相位圖中不存在非理想數(shù)據(jù)點(diǎn))的相位展開(kāi),使用普通的基于深度的優(yōu)先搜索算法即可達(dá)到目的,。它通過(guò)使用閾值來(lái)判斷2π相位跳變,,然后建立補(bǔ)償函數(shù),最后將未展開(kāi)相圖與補(bǔ)償函數(shù)相加,,得到展開(kāi)后的相位圖,。此算法非常簡(jiǎn)單快捷,圖1是應(yīng)用于一個(gè)簡(jiǎn)單區(qū)域的相位展開(kāi)結(jié)果,,左邊為被測(cè)表面的包裹相位圖,,右邊為其相位解包裹后的表面輪廓圖。

圖1 使用傳統(tǒng)相位解包裹算法對(duì)簡(jiǎn)單區(qū)域進(jìn)行相位展開(kāi)的結(jié)果
然而,,MEMS/NEMS結(jié)構(gòu)經(jīng)常具有比較復(fù)雜的輪廓,,含有孔洞、溝槽,、突起等特征形狀,被測(cè)表面也可能存在缺陷,例如表面鍍膜脫落或者粘附上灰塵等,,再加上陰影和噪聲等的影響,,用普通的相位展開(kāi)方法就可能引入誤差,并且誤差會(huì)傳播到在當(dāng)前像素點(diǎn)之后展開(kāi)的所有點(diǎn),。圖2為使用傳統(tǒng)相位解包裹算法對(duì)含有非理想數(shù)據(jù)點(diǎn)的圓形薄膜進(jìn)行相位展開(kāi)的結(jié)果,,左邊為薄膜表面的包裹相位圖,右邊為其相位解包裹后的表面輪廓圖,。
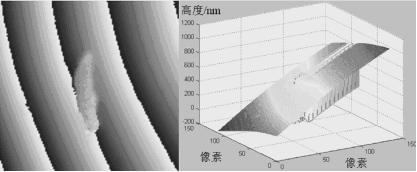
圖2 使用傳統(tǒng)相位解包裹算法對(duì)含有非理想數(shù)據(jù)區(qū)域進(jìn)行相位展開(kāi)的結(jié)果
為了能在相位展開(kāi)過(guò)程中繞過(guò)非相容點(diǎn)(包裹相位圖中的非數(shù)據(jù)點(diǎn)和進(jìn)行相位展開(kāi)運(yùn)算時(shí)可能產(chǎn)生誤差的非理想數(shù)據(jù)點(diǎn)的總稱),,引入基于模板的廣度優(yōu)先搜索算法,它是一種逐點(diǎn)展開(kāi)的生長(zhǎng)算法.在相位展開(kāi)運(yùn)算之前,,先用模板將非相容點(diǎn)標(biāo)記出來(lái),。相位展開(kāi)過(guò)程是從任意的一個(gè)相容點(diǎn)開(kāi)始,然后均勻地向其鄰域彌散生長(zhǎng),,得出其鄰域的展開(kāi)相位值,,再一周一周擴(kuò)大,直至整幅圖像,。在其遍歷過(guò)程中,,遇到由模板標(biāo)記的非相容點(diǎn)時(shí),就暫時(shí)繞過(guò)而不做處理,。用此方法處理的像素點(diǎn)都是相容點(diǎn),,即好的數(shù)據(jù)點(diǎn),因而能夠大幅度地提高相位展開(kāi)的質(zhì)量,。
2 標(biāo)記模板的方法及實(shí)驗(yàn)結(jié)果
用以標(biāo)記非相容點(diǎn)的模板可以通過(guò)多種途徑獲得,。根據(jù)不同應(yīng)用的需要,可以選擇實(shí)現(xiàn)不同功能的不同復(fù)雜程度和不同靈敏程度的模板標(biāo)記方法.本文提出三種不同類型的模板標(biāo)記方法,,用以在不同的應(yīng)用需求下選擇使用:1,、子區(qū)域相容性判斷法;2,、邊緣檢測(cè)法,;3、干涉圖灰度差值提取法.對(duì)應(yīng)于不同標(biāo)記模板的方法,,我們給出了它們應(yīng)用于相位解包裹算法中的具體應(yīng)用實(shí)例,,各方法均由MATLAB編程實(shí)現(xiàn)。
2.1 子區(qū)域相容性判斷法
2.1.1 方法
這種方法在包裹相位圖的基礎(chǔ)上進(jìn)行判斷,。判斷一個(gè)像素點(diǎn)是否相容,,需要利用其周?chē)牧硗馊齻€(gè)像素點(diǎn)的信息。這四個(gè)像素點(diǎn)組成一個(gè)2×2的子區(qū)域(圖3),。按順時(shí)針?lè)较蛴?jì)算這四個(gè)像素點(diǎn)兩兩之間的灰度值之差,,得到Δ1、Δ2、Δ3,、Δ4,;然后確定一個(gè)閾值T(如T=π),該閾值就是用來(lái)判斷相位條紋跳變邊界的那個(gè)“固定閾值”,,并由此閾值判斷Δk,,(k=1,2,,3,,4):如果|Δk|>T,即可認(rèn)為路徑穿過(guò)了跳變的界線,,此時(shí),,若Δk>0,則Δk=Δk-2π,,若Δk<0,,則Δk=Δk+2π,目的是將Δk限定在-π到π之間,;最后求ΣΔk,,再次作判斷:如果ΣΔk=0,,則該點(diǎn)定義為相容點(diǎn),,如果ΣΔk≠0,則該點(diǎn)定義為非相容點(diǎn)[6],。

圖3 標(biāo)記2×2區(qū)域相容性示意圖
2.1.2 實(shí)驗(yàn)結(jié)果
圖4是一幅通過(guò)模擬得到的包裹相位圖(左)及使用子區(qū)域相容性判斷法得到的模板圖(右),。包裹相位圖中的黑色小方塊是加入的非相容區(qū)域,從模板圖可以看出,,使用子區(qū)域相容性判斷法可以將此非相容區(qū)域很好地提取出來(lái),,然而,它在識(shí)別出噪聲點(diǎn)的同時(shí),,一部分相位跳變邊緣也被識(shí)別成了非相容點(diǎn),,以至于相位解包裹之后一些原本好的數(shù)據(jù)點(diǎn)也被繞過(guò),見(jiàn)圖5,。

圖4 模擬的包裹相位圖(左)及使用子區(qū)域相容性判斷法得到的模板圖(右)
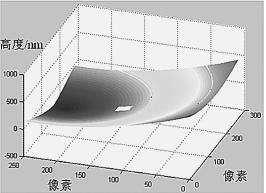
圖5 使用子區(qū)域相容性判斷法獲取模板得到的相位展開(kāi)結(jié)果
子區(qū)域相容性判斷法理論上可行,,但實(shí)驗(yàn)結(jié)果證明其不太適合用于實(shí)際應(yīng)用,特別是噪聲多,,結(jié)構(gòu)復(fù)雜的測(cè)試.但由于此方法運(yùn)算速度非??欤覍?duì)噪聲,、斷點(diǎn)等靈敏度很高,,所以當(dāng)圖像區(qū)域小,,噪聲點(diǎn)遠(yuǎn)離相位跳變邊緣時(shí),仍可以考慮使用,。
2.2 邊緣檢測(cè)法
2.2.1 方法
此方法在由干涉圖合成的亮場(chǎng)圖像上運(yùn)用邊緣檢測(cè)算法來(lái)提取非相容區(qū)域的邊緣.在五步相移干涉測(cè)量中,,由得到的五幅干涉圖像可以合成為被測(cè)表面的亮場(chǎng)圖像[9],,公式為:

式中的Ii為第i幅干涉圖中一個(gè)像素點(diǎn)的灰度值(i=1,,2,3,,4,,5),Ibf為對(duì)應(yīng)像素點(diǎn)亮場(chǎng)圖像的灰度值,。得到整個(gè)待測(cè)區(qū)域的亮場(chǎng)圖像之后,,接下來(lái)選擇合適的邊緣檢測(cè)算法得到非相容區(qū)域模板。應(yīng)用于邊緣檢測(cè)的算子有很多,,最常用的有Sobel,,Prewitt,Roberts,,Canny和Laplacian ofGaussian(Log)等幾種,。由于它們使用不同的梯度算子和檢測(cè)法則來(lái)確定邊緣區(qū)域,因此具有不同的特點(diǎn).Sobel算子和Prewitt算子類似,,對(duì)噪聲有一定的抑制作用,,但容易檢測(cè)出偽邊緣并丟失有用的邊緣信息;Roberts算子的檢測(cè)定位精度比較高,,但對(duì)噪聲敏感,;Canny算子的最優(yōu)化逼近算子和雙閾值的使用使其能有效抑制噪聲,并能精確確定邊緣位置,;Laplacian of Gaussian(LoG)算子選擇濾波的尺度參數(shù)是關(guān)鍵,,小尺度的LoG算子可以得到比較準(zhǔn)確的邊緣定位,但對(duì)噪聲較為敏感,,大尺度的LoG算子濾波效果較好,,但過(guò)度平滑圖像,容易丟失如角點(diǎn)這樣的邊緣信息[10-11],。
2.2.2 實(shí)驗(yàn)結(jié)果
圖6為圖2所示的圓形薄膜部分的一幅干涉圖像(左)和由五幅干涉圖像合成的亮場(chǎng)圖像(右),。使用MATLAB中的edge函數(shù),可以很方便地得到使用不同邊緣檢測(cè)算法得到的邊緣提取結(jié)果,,如圖7(閾值均為缺省設(shè)置),。

圖6 圓形膜部分的干涉圖及亮場(chǎng)圖像

圖7 使用不同算法得到的邊緣檢測(cè)結(jié)果
從上圖結(jié)果可以看出,只有使用Canny算子的結(jié)果得到了非理想數(shù)據(jù)區(qū)完整閉合的邊緣,。圖8是對(duì)Canny算法的閾值進(jìn)行改變得到的結(jié)果,??梢?jiàn),當(dāng)閾值設(shè)定為(0.3,,0.6)時(shí)可得到所需剔除區(qū)域的完整邊緣,。將相應(yīng)的標(biāo)記有非相容點(diǎn)邊緣的模板代入到生長(zhǎng)法程序中,得到解包裹結(jié)果如圖9,。

圖8 更改Canny算法的閾值得到的結(jié)果

圖9 使用邊緣檢測(cè)法獲取模板得到的相位展開(kāi)結(jié)果
使用邊緣檢測(cè)來(lái)獲取相位解包裹模板的方法使用方便,,并且可以根據(jù)具體應(yīng)用選擇合適的閾值來(lái)進(jìn)行靈活控制,比較適合應(yīng)用于具有孔洞等非相容區(qū)域的被測(cè)表面的相位解包裹運(yùn)算中.然而,,由于干涉測(cè)量中噪聲的影響,,合成的亮場(chǎng)圖像本身已含有誤差,應(yīng)用于大范圍的比較復(fù)雜的表面時(shí)這種方法則較難在控制噪聲和精確定位邊緣之間找到平衡,。
2.3 干涉圖灰度差值提取法
2.3.1 方法
這種方法在原始干涉圖的基礎(chǔ)上得到相位解包裹的模板,。在五步相移干涉測(cè)量中,驅(qū)動(dòng)電路驅(qū)動(dòng)壓電陶瓷使得參考鏡步進(jìn)移動(dòng)從而產(chǎn)生步進(jìn)相移,,由此得到時(shí)間序列上的五幅干涉圖像,。參考光路的微小變化使得光程差發(fā)生相應(yīng)變化,致使各幅干涉圖上被測(cè)表面的條紋產(chǎn)生相對(duì)位移,。而由于非數(shù)據(jù)區(qū)沒(méi)有條紋,,或者非相容區(qū)域的條紋信息不夠理想,所以可以根據(jù)各幅干涉圖中對(duì)應(yīng)像素點(diǎn)灰度的差值來(lái)判斷哪些是相容區(qū)域,,從而將非相容區(qū)域提取出來(lái),,得到相位解包裹的模板。具體實(shí)施的方式為:先將各幅干涉圖對(duì)應(yīng)像素的灰度兩兩相減,,得到它們之間的灰度差值,,然后設(shè)定一個(gè)合適的閾值,當(dāng)所有的灰度差值都小于這個(gè)閾值時(shí),,此像素點(diǎn)即被判定為沒(méi)有發(fā)生干涉條紋相對(duì)變化的非相容點(diǎn),。
2.3.2 實(shí)驗(yàn)結(jié)果
如果想要對(duì)如圖10干涉圖所示的圓形薄膜進(jìn)行全視場(chǎng)范圍的解包裹運(yùn)算,由于其輪廓較為復(fù)雜,,并包含有相當(dāng)部分的非數(shù)據(jù)區(qū)和非理想數(shù)據(jù)區(qū),,所以使用干涉圖灰度差值提取的方法來(lái)獲得模板。設(shè)定合適的閾值得到的模板結(jié)果如圖11,,圖中白色區(qū)域?yàn)檩^為理想的條紋區(qū)域,,黑色區(qū)域?yàn)榻獍\(yùn)算中需要繞過(guò)的區(qū)域。圖12是將圖11所示的模板以及包裹圖像代入
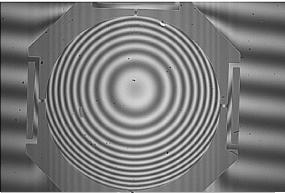
圖10 圓形膜五幅干涉圖中的一幅(1024x1528像素)

圖11 干涉圖灰度差值提取法獲得的解包裹模板圖

圖12 使用干涉圖灰度差提取法獲取模板得到的相位展開(kāi)結(jié)果
生長(zhǎng)算法得到的相位解包裹后并以圓形膜四周的基底區(qū)域作為基準(zhǔn)面調(diào)平后的圓形膜表面3-D輪廓圖像,??梢钥闯觯褂酶缮鎴D灰度差值提取法獲得模板并使用生長(zhǎng)算法在全視場(chǎng)范圍內(nèi)進(jìn)行相位展開(kāi)獲得干涉圖灰度差值提取法的計(jì)算相對(duì)較為復(fù)雜,,但是由于它在最原始的干涉圖像信息上進(jìn)行判斷,,所以成功率高,,也可以通過(guò)改變閾值靈活地控制模板的靈敏度,并且使用范圍很廣,,對(duì)于復(fù)雜輪廓,、溝槽、噪聲等提取都適用,。
3 結(jié)語(yǔ)
具體應(yīng)用實(shí)例的實(shí)驗(yàn)數(shù)據(jù)證明,,基于模板的廣度優(yōu)先搜索相位解包裹方法可以根據(jù)不同應(yīng)用的需要標(biāo)記模板,從而繞過(guò)非相容區(qū)域準(zhǔn)確地實(shí)現(xiàn)相位展開(kāi).如果有必要,,可以根據(jù)被繞過(guò)區(qū)域周?chē)袼攸c(diǎn)的灰度信息,,使用濾波,、插值等方法回添這些點(diǎn)的展開(kāi)相位數(shù)據(jù),。此方法能夠克服普通相位展開(kāi)方法的局限性,并因其簡(jiǎn)便,、靈活,、準(zhǔn)確的特點(diǎn)而能被廣泛應(yīng)用于EMS/NEMS結(jié)構(gòu)較為復(fù)雜的輪廓表面測(cè)量的相位展開(kāi)。其不足在于不能應(yīng)用于非連續(xù)表面輪廓的測(cè)量,。
致謝
感謝北京大學(xué)微米納米加工技術(shù)國(guó)家重點(diǎn)實(shí)驗(yàn)室的陳兢副教授和王莎莎同學(xué)等,,他們?yōu)楸疚牡难芯抗ぷ魈峁┝瞬糠譁y(cè)試結(jié)構(gòu)。
參考文獻(xiàn):
[1] Denhoff M W. A Measurement of Young’s Modulus and Re-sidual Stress in MEMS Bridges Using a Surface Profiler[J].Journal of Micromechanics and Microengineering,,2003,,13:686-692.
[2] Lafontan X,Pressecq F,,Beaudoin F,,et al. The Advent ofMEMS in Space[J]. Microelectronics Reliability,2003,,43:1061-1083.
[3] Jensen B D,,de Boer M P,Masters N D,,et al. Interferometryof Actuated Microcantilevers to Determine Material Propertiesand Test Structure Nonidealities in MEMS[J]. Journal of Mi-croelectromechanical Systems,,2001,10(3):336-346.
[4] Conor O’Mahony,,Martin Hill,,Magali Brunet et al,“Charac-terization of Micromechanical Structures Using White-Light Interferometry[J]”,,Measurement Science and Technology,,2003,14:1807?1814.
[5] Hu Xiaodong,,Hu Chunguang,,Guo Tong,,et al. Characteri-zing the Behaviour of Micro ElectroMechanical Structures by Optical Interferometry[C] // International Workshop on Mi-crofactories. Shanghai:2004:492-497.
[6] 胡春光.利用相移顯微干涉術(shù)和頻閃成像技術(shù)研究MEMS離面運(yùn)動(dòng)[J].天津:天津大學(xué),精密儀器與光電子工程學(xué)院,,2004.
[7] Dennis C. Ghiglia and Mark D. Pritt,,Two-Dimensional PhaseUnwrapping:Theory,Algorithms and Software[M],,John Wiley & Sons,,Inc.,New York 1998:1-58.
[8] 惠梅,,表面微觀形貌測(cè)量中相移干涉術(shù)的算法與實(shí)驗(yàn)研究[D],,博士學(xué)位論文,中國(guó)科學(xué)院西安光學(xué)精密機(jī)械研究所,,2001年.
[9] Hemmert W,,Mermelstein M S and Freeman D M. Nanometer Resolution of Three-Dimensional Motions Using Video Inter-ference Microscopy[C]//Twelfth IEEE International Confer-ence on Micro Electro Mechanical Systems.1999:302-308.
[10] 李弼程,彭天強(qiáng),,彭波等.智能圖像處理技術(shù)[M],,電子工業(yè)出版社,2004:149-160.
[11] 薛軍平,,何繼善.基于人體信息三維可視化的醫(yī)學(xué)圖像邊緣檢測(cè)算法研究[J].生物醫(yī)學(xué)工程研究. 2004,,23(1):7-10.