西安工程大學(xué) 謝檬
現(xiàn)今社會,自動化裝置無所不在,在控制技術(shù)需求的推動下,控制理論本身也取得了顯著的進(jìn)步。水塔水位的監(jiān)測和控制,再也不需要人工進(jìn)行操作。實(shí)踐證明,自動化操作,具有不可替代的應(yīng)用價(jià)值。水塔水位自動控制器,具有適應(yīng)各種液體液位的檢測和控制的功能,設(shè)計(jì)中分析了利弊,考慮了各種液體的阻值大小,是可以投入實(shí)際生產(chǎn)的產(chǎn)品。
1 設(shè)計(jì)分析:
“水塔水位自動控制系統(tǒng)”的控制對象為水泵,容器為水塔或儲液罐。水位高度正常情況下控制在C、D之間,如圖1(a)。當(dāng)水位在低于C點(diǎn)時(shí),水泵開始進(jìn)水,如圖1(b)。當(dāng)水位高于D點(diǎn)時(shí),水泵停止進(jìn)水,如圖1(c)。當(dāng)水位低于C點(diǎn)并到達(dá)B點(diǎn)時(shí)就報(bào)警,采取手動啟動水泵,如圖1(d)。當(dāng)水位超過D點(diǎn)并到達(dá)E點(diǎn)時(shí)上限報(bào)警,采取強(qiáng)制停止水泵,水位從溢流口流出,如圖1(e)。
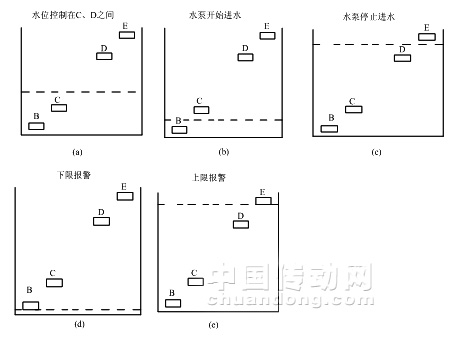
圖1 設(shè)計(jì)分析示意圖
為了精確的實(shí)現(xiàn)對水位的控制,必須建立閉環(huán)控制系統(tǒng)。根據(jù)水塔中的進(jìn)、出水的水位可以自動控制水泵,使水位處于動態(tài)的平衡狀態(tài)。
2 現(xiàn)有設(shè)計(jì)方案的分析:
(1) 555定時(shí)器組成的水位自動控制器。圖2可以看出,電路設(shè)計(jì)過于簡單化,沒有考慮異常情況的排除方法。例如:探頭發(fā)生故障,則此系統(tǒng)無法檢測,導(dǎo)致水位控制器操作異常;沒有設(shè)計(jì)報(bào)警電路,無法方便地讀取水位實(shí)際數(shù)值。

圖2 水位自動控制系統(tǒng)
(2) 用51單片機(jī)設(shè)計(jì)的水位自動控制系統(tǒng)。51單片機(jī)實(shí)際是個(gè)小的微型機(jī),除了硬件電路的搭接外,還需要軟件的開發(fā)和應(yīng)用。這樣會使設(shè)計(jì)變得很繁瑣,同時(shí)從電磁兼容方面考慮,軟件設(shè)計(jì)存在系統(tǒng)地不穩(wěn)定性。在實(shí)際應(yīng)用中,為了滿足工廠的實(shí)際條件,大部分自動化控制裝置采用純硬件的電路設(shè)計(jì)。此外,該電路不能檢測液體的電導(dǎo)率,不適用水塔中液體性質(zhì)改變的情況。
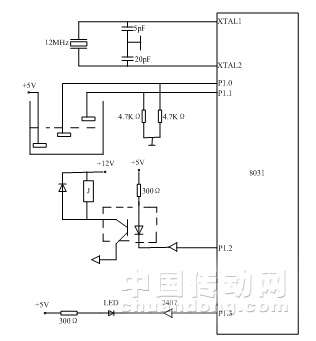
圖3 水塔水位控制電路
3 最優(yōu)方案:
3.1系統(tǒng)框圖
控制系統(tǒng)主要分為模擬檢測和邏輯判斷兩大塊。如圖4所示,模擬檢測實(shí)際上測量的是B、C、D、E四個(gè)探頭相對于A點(diǎn)(即地)電位的高低,在水塔中清水里的四個(gè)探頭B、C、D、E各點(diǎn)和探頭A點(diǎn)之間實(shí)際上相當(dāng)于一個(gè)可變電阻。當(dāng)電阻值發(fā)生變化時(shí),各點(diǎn)的電位值不同,通過邏輯判斷,就得到不同的輸出,即操作控制不同的動作。

圖4 系統(tǒng)框圖
3.2原理圖
圖5為最優(yōu)方案的原理圖。如圖所示:水位正常情況下應(yīng)處于C、D之間,此時(shí),BCDE四個(gè)探頭的邏輯電平為0011,即保持狀態(tài);當(dāng)水位低于C點(diǎn),處于B、C之間時(shí),BCDE四個(gè)探頭的邏輯電平為0111,即進(jìn)水狀態(tài);當(dāng)水位高于D點(diǎn),處于D、E之間時(shí),BCDE四個(gè)探頭的邏輯電平為0001,即停進(jìn)狀態(tài);當(dāng)水位低于B點(diǎn)或水位高于E點(diǎn),此時(shí),BCDE四個(gè)探頭的邏輯電平為1111或0000時(shí),水塔水位的報(bào)警電路開始工作,產(chǎn)生下限報(bào)警或上限報(bào)警,即低報(bào)和高報(bào)。這時(shí),需要工作人員進(jìn)行手動關(guān)閉報(bào)警設(shè)備才可以解除警報(bào)。

圖5 水塔供水系統(tǒng)的最終連線圖
3.3系統(tǒng)優(yōu)化
從圖5中可以看出,B、C、D、E四個(gè)探頭每個(gè)都接有一個(gè)運(yùn)算放大器。實(shí)際運(yùn)行中,當(dāng)某個(gè)探頭出現(xiàn)故障時(shí),系統(tǒng)可以及時(shí)檢測到,不會造成誤動作的產(chǎn)生。同時(shí),新增了報(bào)警確認(rèn)電路。這樣,當(dāng)誤動作產(chǎn)生以及水塔內(nèi)水位的過低或者過高,都會啟動報(bào)警裝置。一旦系統(tǒng)發(fā)生報(bào)警,就可以及時(shí)去處理問題。問題處理完畢之后,工作人員可以手動關(guān)閉報(bào)警裝置。因此,優(yōu)化的方案增強(qiáng)了系統(tǒng)的可靠性、穩(wěn)定性和實(shí)用性。
4 水塔水位控制器的可行性試驗(yàn)
4.1可行性試驗(yàn)
圖6為水塔水位控制器的外觀正視圖,由電源指示燈、報(bào)警確認(rèn)燈、水位指示燈以及報(bào)警確認(rèn)開關(guān)組成。接通電源時(shí),電源指示燈亮,當(dāng)水塔中水深處于不同位置時(shí),水位指示燈B、C、D、E情況不同。

圖6 水塔水位控制器外觀圖
①當(dāng)水位處于B點(diǎn)之下,指示燈B、C、D、E全亮,報(bào)警電路開始報(bào)警,即下限報(bào)警。
②當(dāng)水位處于B、C之間,指示燈B滅,C、D、E亮,水泵開始進(jìn)水。
③當(dāng)水位處于C、D之間,指示燈B、C滅,C、D亮,保持狀態(tài),即保持進(jìn)水。
④當(dāng)水位處于D、E之間,指示燈B、C、D滅,E亮,停進(jìn)狀態(tài),即水泵不工作。
⑤當(dāng)水位處于E點(diǎn)之上,指示燈B、C、D、E全滅,水泵不工作,報(bào)警電路開始溢出報(bào)警,即上限報(bào)警。
⑥報(bào)警電路可以手動關(guān)閉,只要按下報(bào)警確認(rèn)開關(guān),就可以解除報(bào)警的蜂鳴聲。此時(shí),報(bào)警確認(rèn)燈亮起。處理完故障時(shí),必須關(guān)閉報(bào)警確認(rèn)燈,報(bào)警確認(rèn)電路復(fù)位,恢復(fù)其監(jiān)測故障的功能。
4.2可行性分析
此方案采用純硬件電路設(shè)計(jì),避免了軟件程序設(shè)計(jì)中的不穩(wěn)定因素,提高了實(shí)際運(yùn)用中的可靠性。同時(shí),對于不同類型的液體,此系統(tǒng)均有良好的兼容性。當(dāng)水塔中液體改變時(shí),只需要將電位器中的阻值和該液體的阻值調(diào)節(jié)到一個(gè)數(shù)量級上就可以很方便的實(shí)現(xiàn)此液體的水位控制操作。試驗(yàn)證明,此水塔水位控制器不僅實(shí)現(xiàn)了對水塔水位的精確控制,而且,此系統(tǒng)更具有工業(yè)生產(chǎn)的實(shí)際性。
5 結(jié)束語
本文通過介紹自行設(shè)計(jì)的水塔水位控制器,系統(tǒng)地闡述了設(shè)計(jì)方案及成品試驗(yàn)。試驗(yàn)證明,該系統(tǒng)在運(yùn)行期間穩(wěn)定性高,完全符合預(yù)先規(guī)定的標(biāo)準(zhǔn),是可以投入生產(chǎn)的水塔水位控制器。
參考文獻(xiàn):
(1)胡壽松主編.自動控制原理.第四版.北京:科學(xué)出版社,2001年
(2)劉豹主編.現(xiàn)代控制理論.第二版.北京:機(jī)械工業(yè)出版社,2004年
(3)Gene F.Franklin,J.David Powell,Abbas.Emami-Naeini,Feedback Control of Dynamic Systems,Publishing House of Electrronics Industry
(4)朱曉青主編.過程檢測控制技術(shù)與應(yīng)用.北京:冶金工業(yè)出版社,2002年
(5)姚伯威,孫銳主編.控制工程基礎(chǔ).北京:國防工業(yè)出版社,2002年
(6)李朝青編著.單片機(jī)原理及接口技術(shù).簡明修訂版.北京:北京航天航空大學(xué)出版社,1998年
(7)戴文進(jìn),章衛(wèi)國主編.自動化專業(yè)英語.武漢:武漢理工大學(xué)出版社,2001年
(8)談?wù)穹帲詣涌刂茖I(yè)英語.哈爾濱:哈爾濱工程大學(xué)出版社,1999年
