
光電編碼器在現(xiàn)代電機控制系統(tǒng)中常用以檢測轉(zhuǎn)子的位置與速度,是通過光電轉(zhuǎn)換將輸出軸上的機械幾何位移量轉(zhuǎn)換成脈沖或數(shù)字量的高精度角位置測量傳感器,。由于其具有分辨率高,、響應速度快、體積小,、輸出穩(wěn)定等特點,,被廣泛應用于電機伺服控制系統(tǒng)中。
編碼器按信號輸出形式分為絕對式編碼器和增量式編碼器,。絕對式光電編碼器具有輸出數(shù)字量可與PC機,、ARM或FPGA等器件直接接口,無累積誤差等優(yōu)點,,但價格高、制造工藝復雜,,不宜實現(xiàn)小型化,。增量式光電編碼器不具有計數(shù)和接口電路,一般輸出A,、B,、Z脈沖信號,價格較低,,在實際工程中比較常用,。
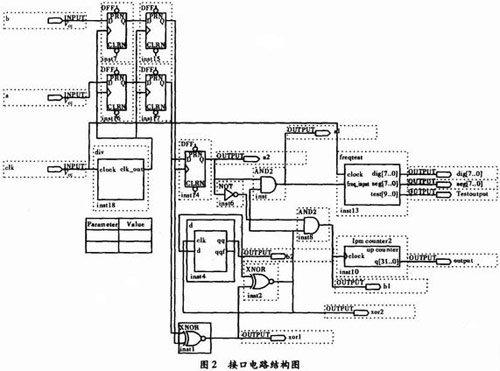
文中設計了一個基于FPGA的簡單且精度高的接口電路,其結(jié)構(gòu)簡單,、性能可靠,。具有濾波、硬件辨向,、4倍頻計數(shù)和數(shù)據(jù)鎖存等功能,。計數(shù)結(jié)果以并口輸出,可與PC機,、ARM或FPGA等部件進行并行通信,。同時在并口之前,用鎖存電路來消除硬件電路延時所可能引起韻計數(shù)錯誤,,減輕了后續(xù)微機的負擔,,可提高被控對象的測量和控制精度。
1 4倍頻電路設計原理
增量式光電編碼器實際是一種旋轉(zhuǎn)式角位移檢測裝置,,它根據(jù)軸所轉(zhuǎn)過的角度,,輸出一系列脈沖,能將機械轉(zhuǎn)角變換成電脈沖,,輸出信號如圖1所示,。A,、B兩相信號是相位相差90°的正交方波脈沖串,每個脈沖代表被測對象旋轉(zhuǎn)了一定的角度,,A,、B之間的相位關系則反映了被測對象的旋轉(zhuǎn)方向,即當A相超前B相,,轉(zhuǎn)動方向為正轉(zhuǎn),;當B相超前A相,轉(zhuǎn)動方向為反轉(zhuǎn),。Z信號是一個代表零位的脈沖信號,,可用于調(diào)零、對位和重置計數(shù)器,。
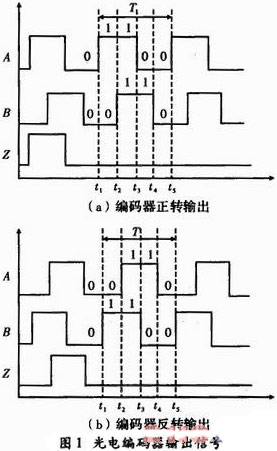
對于每個確定的編碼器,,每轉(zhuǎn)過固定角位移θ,就對應一個脈沖信號,,故其量化誤差為θ/2,。若將A或B信號4倍頻,則在此θ角位移內(nèi),,就會產(chǎn)生4個脈沖信號,,其量化誤差下降為0/8,光電編碼器的角位移測量精度提高4倍,。由于伺服系統(tǒng)中編碼器的轉(zhuǎn)速具有不可預見性,,造成脈沖周期r具有不確定的特點,從而無法使用鎖相環(huán)等常用倍頻方案,。由圖1可知,,在脈沖周期內(nèi),A,、B兩相信號共產(chǎn)生4次變化,,盡管T不確定,但由于A,、B兩相方波信號之間相位關系確定,,使這4次變化在相位上平均分布。如果利用這4次變化產(chǎn)生4倍頻信號,,則可以實現(xiàn)光電編碼器測量精度的提高,。
分析發(fā)現(xiàn),4倍頻設計的關鍵在于鑒別出A,、B信號的上升沿和下降沿,。輸入信號與其延時信號異或后,就可得到倍頻信號,。
2 接口電路的FPGA總體方案及設計實現(xiàn)
光電編碼器的可靠性與精度直接決定了控制系統(tǒng)的可靠性與控制精度,??刂葡到y(tǒng)精度不會高于檢測元件的精度,也就是說檢測元件的誤差是決定控制系統(tǒng)穩(wěn)態(tài)誤差的關鍵,,這種誤差也是控制系統(tǒng)無法克服的,。因此,選擇和設計高精度的光電編碼器固然重要,,但后續(xù)電路對光電編碼器輸出脈沖的處理精度也不容忽視,。因此,一方面要選擇精度高的光電編碼器,;另一方面要重視對光電編碼器輸出脈沖的處理,,傳統(tǒng)的處理方法有3種:(1)通過74LS193、74LS171,、RC等搭建一個硬件電路實現(xiàn)脈沖的倍頻和鑒相的判斷,。(2)直接將光電編碼器的A、B信號送至微處理器,,進行純軟件的倍頻和鑒相的判別,。(3)通過硬件電路和軟件結(jié)合的方法進行光電編碼器脈沖的處理,一般是指上述兩種方法的結(jié)合,。
對以上3種計數(shù)方法進行分析可知,用純軟件計數(shù)雖然電路簡單,,但是計數(shù)速度慢,,微處理器工作量大,難以滿足實時性要求,,想得到更高的指標,,只能不斷地更換高性能微處理器,而且由于光電編碼器的轉(zhuǎn)速具有不可預見性,,采用鎖相環(huán)進行倍頻的話會造成數(shù)據(jù)的不精確,;而純硬件電路體積大且穩(wěn)定性、可靠性差,、調(diào)試煩瑣,,而且當電阻、電容等組件參數(shù)變化時,,會導致脈寬發(fā)生變化或不能產(chǎn)生具有穩(wěn)定寬度的脈沖,。此外,RC電路抗干擾能力差,,反饋部分易受外界干擾,,在實際應用中會出現(xiàn)丟失脈沖現(xiàn)象,以至影響控制系統(tǒng)的精度和可靠性,。
對于濾波,、延時的處理方法很多,,如微分型電路其信噪比小、抗干擾性差,,積分型電路可以提高信噪比,,但和微分型電路一樣有缺點:當輸入信號頻率高時,電容充放電不及時,,導致輸出信號嚴重變形,;對于各路倍頻電路來說,電阻和電容的參數(shù)不可能完全一致,,所以倍頻后的各路脈沖寬度不等,,而且寬度的調(diào)節(jié)也比較困難。設計采用的數(shù)字型延時電路可以很好地克服以上延時電路的缺點,,延時的時間和各路倍頻的脈沖寬度由時鐘控制,,倍頻后的脈沖寬度均勻一致。
運用FPGA實現(xiàn)4倍頻,、鑒相電路,,采用全數(shù)字反饋電路的設計方法,由于倍頻,、鑒相電路設計在同一芯片上,,一方面,F(xiàn)PGA門電路高數(shù)量較大,,時鐘頻率可達上百MHz的可編程邏輯器件,,可以把他設計成所需的各種邏輯器件,可并行處理多項任務,。因此處理速度比單片機或DSP快得多,;另一方面,芯片內(nèi)部的門電路,、觸發(fā)器的參數(shù)特性完全一致,,能保證在相同轉(zhuǎn)速下4倍頻脈沖信號的周期保持一致。作為板級芯片,,電路做在芯片內(nèi)部,,其抗干擾能力比分離器件有很大提高。同時,,由于現(xiàn)場可編程,,可以方便地實現(xiàn)對電路的重新設計或修改,增強了系統(tǒng)的靈活性,、通用性和可靠性,。
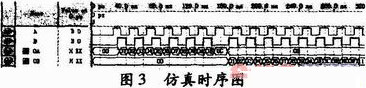
3 仿真波形
用Verilog HDL語言完成電路描述,各功能模塊運用原理圖方式進行描述,芯片采用Ahera公司Cyclone系列的EP1C12Q240C8N,。在Quart-usII10.0環(huán)境下進行功能和時序仿真,。編譯后結(jié)果如圖3所示,A,、B即為差分整形電路的輸出,,當A相超前B相時,輸出正向4倍頻脈沖,,OA[7..0]為編碼器正轉(zhuǎn)時4倍頻脈沖個數(shù),;反之,輸出反向4倍頻脈沖,,OB[7..0]為反轉(zhuǎn)時4倍頻脈沖個數(shù),。利用OA[7..0]與OB[7..0]可以方便地實現(xiàn)編碼器的可逆計數(shù)。
4 結(jié)束語
設計了增量式光電編碼器的一種簡單且高精度的鑒相,、計數(shù)和接口電路,,可根據(jù)光電編碼器的轉(zhuǎn)向進行遞增或遞減計數(shù),并可與PC機,、DSP,、ARM等器件直接進行并行通訊。實驗結(jié)果驗證了設計的正確性,??梢钥闯觯肍PGA設計光電編碼器信號處理模塊,,無論是設計過程,,還是電路結(jié)構(gòu)、都變得更加簡潔,。另外,在應用中注意FPGA的時鐘周期應小于編碼器脈沖的1/4,,通常FPGA的時鐘已遠遠小于編碼器脈沖周期,,故在FPGA中進行處理與計數(shù)是沒問題的。
文中FPGA實現(xiàn)的編碼器倍頻,、鑒相電路,,已經(jīng)在激光跟蹤系統(tǒng)的項目中得到驗證,在系統(tǒng)中存在抖動及毛刺等干擾的情況下,,仍能獲得穩(wěn)定可靠的測量結(jié)果,,并且可根據(jù)需要,任意改變參數(shù)以達到目的,,這對正確和合理地使用編碼器,,提高功能效益,從而在數(shù)控及機器人的死循環(huán)位置和速度控制系統(tǒng)中,提高位置調(diào)節(jié)精度,、擴大速度調(diào)節(jié)范圍,,都有良好的效果,是一種提高編碼器分辨率,、實現(xiàn)角位移或轉(zhuǎn)速測量的優(yōu)選電路,。