
0 引言
作為信息高速公路的載體,以及光纖通信系統(tǒng)的重要組成部分,光纖體現(xiàn)了非常優(yōu)越的信息傳輸特性,是構(gòu)成21世紀(jì)信息社會的一個不可或缺要素。在光纖通信中,光纖的活動連接都是通過光纖連接器實現(xiàn)的,光纖端面的潔凈程度對連接器的性能有決定性的影響。除了在拋光過程中或者在光纖插拔等在線業(yè)務(wù)操作過程中產(chǎn)生的光纖端面永久性損傷(如劃傷、裂痕)外,由于在平時使用中可能會與不潔凈的手、光纖帽邊緣、法蘭盤金屬邊緣、臟的光纖端面以及空氣中的顆粒接觸,光纖端面還會受到各種各樣的臨時性污染(如污垢、油漬、水或清洗劑的殘留),從而使得其性能受到影響,這不僅會使連接損耗變大、通信性能下降,嚴(yán)重時則纖芯被堵不能傳輸光,從而導(dǎo)致纖芯被高功率激光燒壞。為了保證光纖通信的穩(wěn)定與高效,每個光纖的端面必須保證一定程度上的清潔。
傳統(tǒng)的光纖端面缺陷檢測方法是采用人工檢測的方法,這種方法首先將光纖端面的圖像采集出來,然后用肉眼觀察臟污,再進(jìn)行人工判定。由于這種方法是檢查者肉眼連續(xù)觀察光纖的端面,容易使人感到視覺疲勞,所以效率比較低。而且每個人的經(jīng)驗和責(zé)任心不一樣,得到的產(chǎn)品質(zhì)量也會有相當(dāng)大的差異。為了提高產(chǎn)品的可靠性和生產(chǎn)效率,本文提出了一種拋棄人工肉眼檢測而使用機(jī)器視覺進(jìn)行檢測的方法。機(jī)器視覺主要用計算機(jī)來模擬人的視覺功能,從客觀事物的圖像中提取信息,進(jìn)行圖像處理并加以理解,然后用于光纖端面的缺陷檢測。與人工檢測相比,機(jī)器視覺檢測方法提高了檢測的準(zhǔn)確性,降低了測試成本,增強(qiáng)了測試能力,使得對生產(chǎn)線上操作人員的培訓(xùn)難度降低,而且能獲得更多的生產(chǎn)線監(jiān)測數(shù)據(jù)信息。
本文介紹了如何利用機(jī)器視覺進(jìn)行光纖端面的缺陷檢測,并使用美國國家儀器(NI)公司的VBAI視覺自動檢測開發(fā)環(huán)境完成了機(jī)器視覺系統(tǒng)的開發(fā)。VBAI(Vision Builder for Automated Inspection)是NI推出的一款視覺檢查軟件,作為自動檢測的視覺生成器。此工具是實驗室進(jìn)行快速視覺效果驗證的理想工具,也是很好的生產(chǎn)線簡易測試平臺。結(jié)果顯示,該系統(tǒng)能夠比較精確地檢測出缺陷所在位置及其大小,速度較快,達(dá)到了對光纖端面缺陷檢測的要求。
1 檢測系統(tǒng)
本文所提出的光纖端面缺陷機(jī)器視覺檢測系統(tǒng)由光纖端面檢測儀以及PC系統(tǒng)組成。檢測的時候?qū)⒐饫w活動連接器插入光纖端面檢測儀的固定測試平臺中,而光纖端面檢測儀通過USB線連接到PC系統(tǒng)上,這樣就能將圖像采集到電腦里。調(diào)整顯微鏡焦距,一旦得到了滿意的圖像,就啟動軟件對光纖端面進(jìn)行分析,與軟件預(yù)設(shè)的標(biāo)準(zhǔn)指標(biāo)進(jìn)行比較,從而定量地確定各區(qū)域信息,判斷該光纖端面合格與否。
該系統(tǒng)的檢測效果與軟件的能力、顯微鏡性能以及操作人員對焦圖像的技能有關(guān),已經(jīng)證明了其在準(zhǔn)確性、可重復(fù)性、再現(xiàn)性以及檢測效率等方面明顯優(yōu)于人工檢測。該方案還可以提供檢測結(jié)果的具體記錄,包括端面圖像和損傷檢測數(shù)據(jù)等,提高系統(tǒng)的自動化程度。
2 檢測過程
本系統(tǒng)所使用的檢測軟件是基于VBAI視覺自動檢測開發(fā)環(huán)境開發(fā)的,具備對光纖端面圖像進(jìn)行處理和分析的能力,其處理流程如圖1所示。
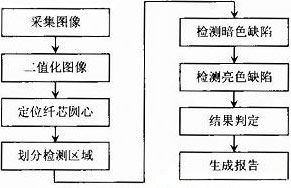
圖1 系統(tǒng)軟件處流程圖
在使用光纖端面檢測儀對光纖端面進(jìn)行圖像采集的時候,由于光纖端面每次出現(xiàn)在視野范圍中的位置都有所不同,所以首先要對光纖端面纖芯的位置進(jìn)行定位才能對其進(jìn)行一系列的檢測。要定位纖芯的位置,首先需要將采集到的圖像二值化。因為通過光纖端面檢測儀采集得到的初始圖像為32位的,而在VBAI中對圖像分析處理的函數(shù)模塊基本上都是不支持32位圖的,所以只有把32位圖轉(zhuǎn)化成二值圖像,才能對其進(jìn)行一系列精確的分析。使用VBAI的視覺助手(Vision Assistant)函數(shù)模塊對初始圖像進(jìn)行圖像處理,通過抽取色彩值(Extract HSL)的子函數(shù)即可得到灰度8位圖,然后使用閾值法將圖像二值化。
閾值法是一種簡單而且有效的圖像分割方法,此方法是用一個或幾個閾值將圖像的像素灰度級分為幾個級別,屬于一個級別的像素點被認(rèn)為是同一類物體。需要注意的是,在光纖端面檢測的過程中,由于包層可能會和包層外的臟污屬于同一個灰度級,所以在對包層外的臟污檢測的時候是不能同時對包層上的臟污進(jìn)行檢測的,需要將包層屏蔽以后再檢測。
在本系統(tǒng)中,設(shè)F(x,y)表示對圖像二值化的輸出,其像素灰度級范圍為[a,b],對同一類型的缺陷檢測時只需要設(shè)定一個a和b之間的閾值TH,把圖像的像素分成大于TH的像素群(缺陷)和小于TH的像素群(背景)兩部分。即:

圖像二值化將缺陷像素點的灰度值設(shè)為0,背景像素點的灰度值設(shè)為1。在VBAI的視覺助手函數(shù)模塊中就有設(shè)置閾值(Threshold)的函數(shù)子模塊,調(diào)用的時候只需要在閾值直方圖上根據(jù)雙峰法找到波峰與波谷,并手動調(diào)整閾值的大小,使其能將缺陷與背景區(qū)分開來即可,如圖2所示。

圖2 原始圖像及其閾值直方圖
2.1 纖芯的定位
本文定位光纖纖芯所使用的是方法是先找到光纖的整個包層,由于光纖包層的形狀是一個圓,而這個圓的圓心就是纖芯的中心了。光纖端面存在較大程度的污染的話,如果只是設(shè)置一定的閾值將圖像二值化,得到的二值圖像除了光纖包層外還可能會有很多臟污,這樣就會對光纖包層的定位產(chǎn)生很大的影響。所以二值化圖像后還需要使用視覺助手里的一些子函數(shù)模塊對圖像進(jìn)行一些形態(tài)學(xué)的處理,使用移除小顆粒(RemoveSmall Objeets)和移除大顆粒(Remove Large Objects)這兩種函數(shù)子模塊,調(diào)整迭代次數(shù)的大小,把比光纖包層小和比光纖包層大的顆粒都濾掉,從而除去對光纖包層定位的干擾,使得到的二值圖像里只有光纖包層的圖像,如圖3所示。
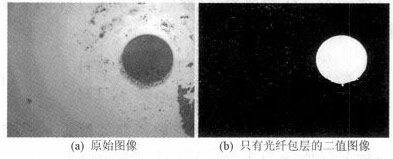
圖3 將原始圖像處理成只有光纖包層的二值圖像

圖4 不同位置纖芯的定位
得到光纖包層的二值圖像后,利用VBAI中尋找圓邊緣(Find Circular Edge)以及建立坐標(biāo)系(Set Coordinate System)的函數(shù)模塊,即能準(zhǔn)確地定位光纖纖芯的位置。尋找圓邊緣是為了尋找光纖包層圓的邊緣,從而尋找到光纖包層圓的圓心,這個圓心也是纖芯圓的圓心,然后以這個圓心為坐標(biāo)系原點建立坐標(biāo)系。在VBAI中,建立坐標(biāo)系這個函數(shù)的功能是定位特征,它能根據(jù)尋找到的包層圓自動定位圓心,即使包層在圖像中的位置改變,坐標(biāo)系原點也能準(zhǔn)確地定位在包層圓的圓心上,而包層圓的圓心就是纖芯圓的圓心。由圖4可見,坐標(biāo)系的原點可以很精確地定位在位置不同的纖芯圓的圓心上,即使是在不規(guī)則的包層面上。
2.2 檢測區(qū)域的劃分
在定位了光纖纖芯之后,由于在光纖端面上不同圓環(huán)范圍內(nèi)所用的檢測標(biāo)準(zhǔn)也不同,所以要以纖芯中心為圓心作不同區(qū)域的圓環(huán),再在每個圓環(huán)內(nèi)按規(guī)定的檢測標(biāo)準(zhǔn)進(jìn)行檢測。如果有任意一個圓環(huán)內(nèi)的檢測不能通過,則這個光纖就是有缺陷的,不能通過。在劃分區(qū)域的時候,由于通過光纖端面檢測儀采集得到的圖像在VBAI環(huán)境下是以像素(pix)為計量單位的,而一般檢測標(biāo)準(zhǔn)中給出的光纖端面檢測要求是以微米(μm)為計量單位的,所以要通過公式(2)進(jìn)行轉(zhuǎn)換將微米(μm)轉(zhuǎn)換成像素(pix)。轉(zhuǎn)換的時候需要知道一個參數(shù):dpi(每英寸多少點),知道了dpi就可以從公式(2)得到像素與微米的轉(zhuǎn)換關(guān)系。設(shè)P為像素,D為dpi,I為英尺,M為微米,則:
![]()
一張圖片的dpi可以通過一些常用的看圖軟件得到(如Acdsee,Photoshop等),平時所用的640×480或800×600等標(biāo)準(zhǔn)的分辨率的dpi是一個常數(shù):96。這樣在對光纖端面進(jìn)行區(qū)域劃分的時候,就能準(zhǔn)確地算出每個圓環(huán)的直徑,從而對整個光纖端面可以進(jìn)行細(xì)致并且精確的檢測。
2.3 缺陷的檢測
2.3.1 不同的閾值
光纖端面缺陷包括白點(崩缺)、黑點(臟污)、陰影(內(nèi)裂)以及劃痕。其中崩缺和劃痕是顏色亮于光纖端面的部分,而臟污和陰影是顏色暗于光纖端面的部分。要檢測出這些缺陷,對每個區(qū)域的每個亮部檢測前都要重新對原始圖像進(jìn)行一次圖像處理,同時對每個區(qū)域的每個暗部檢測前也要重新對原始圖像進(jìn)行一次圖像處理,以便設(shè)置不同的閾值以區(qū)分出比光纖端面亮的部分和比光纖端面暗的部分。這樣在檢測過程中就先后對暗部和亮部進(jìn)行了檢測,如果兩者中任何一種檢測不能通過,則這個區(qū)域的檢測就是不能通過的。
光纖端面需要進(jìn)行檢測的區(qū)域包含了光纖包層和光纖包層以外的陶瓷部分,所以亮色缺陷和暗色缺陷除了分布在光纖包層上外還有可能會分布在陶瓷面上。由于光纖包層在采集的圖像中是暗色的,與暗色的缺陷色度比較接近,而包層外的陶瓷部分色度則更接近于亮色的缺陷。所以檢測光纖包層上和包層外陶瓷面上的缺陷時,針對暗色缺陷和亮色缺陷都需要分別設(shè)定不同的閾值,才能準(zhǔn)確地檢測出整個端面的缺陷。因此利用VBAI檢測光纖包層外的陶瓷面區(qū)域時,需要重新根據(jù)雙峰法設(shè)定閾值,如圖5所示。
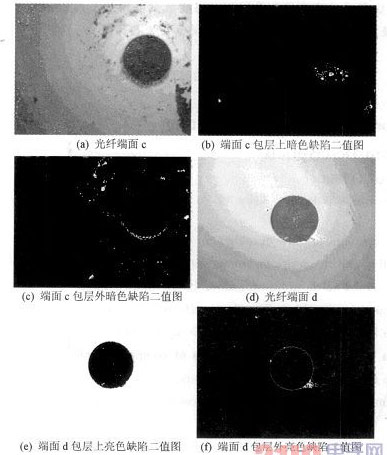
圖5 對包層內(nèi)和包層外暗色缺陷和亮色缺陷的不同二值化處理
由圖5可見,在檢測的過程中,必須要針對暗色缺陷和亮色缺陷在光纖端面包層內(nèi)外的不同分布,分別設(shè)定不同的閾值,否則會極大的影響檢測的精確度。需要注意的是,纖芯本身就是亮色的,所以亮色缺陷檢測過程中需要把纖芯忽略掉。
2.3.2 缺陷的判定
在光纖端面缺陷檢測中,既有不能接受的缺陷,也有可以接受的缺陷,對于崩缺、臟污、內(nèi)裂和劃痕這類缺陷顆粒,鑒定其能不能被接受就取決于它們的大小與長度。一般,評價它們的大小與長度主要是根據(jù)其費雷特直徑(Feret Diameter)的大小。費雷特直徑是一種常用的顆粒直徑表示方法,對于規(guī)則的球形顆粒,可以用“直徑”來精確描述其大小,但是絕大多數(shù)情形下顆粒尤其是劃痕的形狀都不是球形,用直徑表示顯然欠確切,也容易引起誤解。因此,表示顆粒大小引用“顆粒直徑”的概念。所謂顆粒直徑,即表示顆粒大小的“一因次”尺寸。“因次”又稱為量綱,是基本物理量的度量單位,例如長短、體積、質(zhì)量、時間等等。同一顆粒,由于應(yīng)用場合不同,測量的方法也往往不同,所得到的顆粒直徑的值當(dāng)然也不同,如:在顯微鏡下觀察到的是顆粒在與視線垂直的平面上的尺寸,篩分所得到的粒徑是篩孔尺寸,沉降所得到的是某種沉降特性相同的球形顆粒的直徑等。
本文的光纖端面缺陷機(jī)器視覺檢測中,二值化圖像后要測量的缺陷的費雷特直徑即是在顯微鏡下與視線垂直的平面上的尺寸。任何一個不規(guī)則物體的費雷特直徑都有大有小,通常所需要得到的是最大的費雷特直徑,然后和檢測標(biāo)準(zhǔn)進(jìn)行對比,如果最大費雷特直徑大于可以接受的缺陷顆粒直徑,則檢測不能通過。VBAI的功能非常強(qiáng)大,它提供了能夠直接測量最大費雷特直徑(Max Feret Diameter)的函數(shù),由此便可以方便快捷地測出各種缺陷顆粒的最大費雷特直徑大小,包括線性特征的劃痕,劃痕的最大費雷特直徑就是其長度。在VBAI的視覺助手函數(shù)模塊中有一個質(zhì)點過濾(Particle Filter)的子函數(shù)模塊,它可以設(shè)定一定范圍的最大費雷特直徑值,然后將最大費雷特直徑處于這個范圍內(nèi)的缺陷顆粒都過濾掉,接著進(jìn)行判定,例如:在一個檢測區(qū)域內(nèi),要求最大費雷特直徑小于等于5μm的缺陷顆粒不能超過5個,并且無大于5μm的缺陷顆粒。利用公式(2)可以計算出,放大400倍后5μm轉(zhuǎn)換成像素值約等于7.559pix。然后利用質(zhì)點過濾函數(shù)模塊,先將最大費雷特直徑小于7.559pix的缺陷顆粒濾去,用粒子分析(Detect Objects)函數(shù)模塊檢測顆粒的數(shù)量,如果檢測出有顆粒就判定不能通過;接著再利用質(zhì)點過濾函數(shù)模塊將最大費雷特直徑大于7.559pix的顆粒濾去,依舊用粒子分析函數(shù)模塊檢測顆粒數(shù)量,如果檢測出有大于5個顆粒就判定不能通過。
檢測完所有的區(qū)域后,調(diào)用VBAI里的設(shè)定整體檢測狀態(tài)(Set Inspection Status)函數(shù)模塊,里面有一個選項是“任何一個檢測步驟不能通過,則這個檢測不能通過(Fail if Any Previous Step Fails)”,把這個選項點選上,則前面任何一個區(qū)域的檢測不能通過的話,這個光纖端面的檢測就判定為不能通過,這樣就不會漏過任何一個不符合檢測要求的檢測區(qū)域了。
2.4 報表的生成
報表作為檢驗測試結(jié)果最直觀和最重要的憑證,是測試系統(tǒng)必不可少的組成部分。每個光纖端面檢測完成后都會產(chǎn)生許多數(shù)據(jù),包括每個檢測區(qū)域缺陷的數(shù)量、大小等等。如果將這些數(shù)據(jù)指定文件路徑后自動導(dǎo)入到Excel或Word文件中,不僅可以提高整個檢測系統(tǒng)的自動化程度,還大大降低了測試人員的工作量。因此在程序的最后加上VBAI中的一個數(shù)據(jù)導(dǎo)出(Data Logging)函數(shù)模塊,將數(shù)據(jù)以Excel格式保存在本機(jī)電腦硬盤上或者將其上傳至FTP服務(wù)器中并保存起來,提高數(shù)據(jù)的安全性和可靠性,方便隨時查看。
3 結(jié)論
本文結(jié)合圖像處理技術(shù),根據(jù)采集的光纖端面圖像開發(fā)出了一套基于機(jī)器視覺的光纖端面缺陷檢測系統(tǒng),經(jīng)過實驗證明,這個系統(tǒng)能夠高效率、高質(zhì)量的對光纖端面的缺陷進(jìn)行檢測與判斷,避免人工檢測帶來的操作失誤現(xiàn)象,極大地提高了檢測的可靠性。
除了本文中對光纖端面檢測的應(yīng)用外,借助紅外線、紫外線、X射線、超聲波等高新探測技術(shù),機(jī)器視覺在檢測非可視物體和高危險場景時更具有其突出優(yōu)點。因此,機(jī)器視覺檢測將會成為越來越受歡迎的方案。