
PWM是一種對(duì)模擬信號(hào)電平進(jìn)行數(shù)字編碼的方法。通過高分辨率計(jì)數(shù)器的使用,方波的占空比被調(diào)制用來對(duì)一個(gè)具體模擬信號(hào)的電平進(jìn)行編碼。PWM 信號(hào)仍然是數(shù)字的,因?yàn)樵诮o定的任何時(shí)刻,滿幅值的直流供電要么完全有(ON),要么完全無(OFF)。電壓或電流源是以一種通(ON)或斷(OFF)的 重復(fù)脈沖序列被加到模擬負(fù)載上去的。通的時(shí)候即是直流供電被加到負(fù)載上的時(shí)候,斷的時(shí)候即是供電被斷開的時(shí)候。只要帶寬足夠,任何模擬值都可以使用PWM 進(jìn)行編碼。
PWM的一個(gè)優(yōu)點(diǎn)是從處理器到被控系統(tǒng)信號(hào)都是數(shù)字形式的,無需進(jìn)行數(shù)模轉(zhuǎn)換。讓信號(hào)保持為數(shù)字形式可將噪聲影響降到最小。噪聲只有在強(qiáng)到足以將邏輯1改變?yōu)檫壿?或?qū)⑦壿?改變?yōu)檫壿?時(shí),也才能對(duì)數(shù)字信號(hào)產(chǎn)生影響。
工業(yè)控制常用PID控制點(diǎn)輸出模擬量控制閥門的開度,但時(shí)有時(shí)現(xiàn)場(chǎng)使用開關(guān)量控制閥門,此時(shí)需要為PID控制點(diǎn)輸出值進(jìn)行PWM編碼。為此我們開發(fā)PWM點(diǎn)。
PWM點(diǎn)將PID輸出值(OP)按控制周期進(jìn)行PWM編碼。如PID點(diǎn)OP輸出值為:70;輸出值范圍為:0 - 100;控制周期為10秒。如果PWM點(diǎn)輸入范圍、控制周期與PID點(diǎn)相同,那么PWM點(diǎn)在控制周期內(nèi)先打開7秒,關(guān)閉3秒。
在紫金橋組態(tài)軟件中創(chuàng)建PWM點(diǎn)
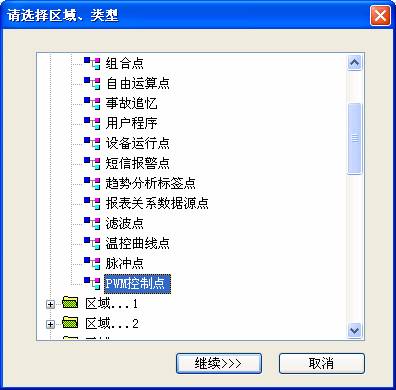
打開工程,把導(dǎo)航器切換到”數(shù)據(jù)庫”頁,進(jìn)入“點(diǎn)組態(tài)”,并且打開點(diǎn)組態(tài)編輯器,在新建數(shù)據(jù)點(diǎn)時(shí)選擇“PWM控制點(diǎn)”。
如下圖所示 :
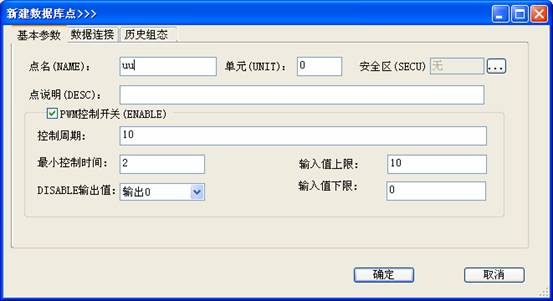
PWM點(diǎn)的設(shè)置
如下圖所示:
基本參數(shù)
PWM點(diǎn)參數(shù)列表:
|
參數(shù)類別 |
參數(shù) |
|
基本參數(shù) |
點(diǎn)名NAME |
|
類型KIND |
|
|
描述DESC |
|
|
單元UNIT |
|
|
安全區(qū)SECU |
|
|
輸入輸出參數(shù) |
輸入值IN_PV |
|
輸出值 OUT_PV |
|
|
PWM點(diǎn)參數(shù) |
控制周期表達(dá)式 CYCLE |
|
輸入值上限 IN_UPPER |
|
|
輸入值下限 IN_LOWER |
|
|
最小控制時(shí)間 MIN_CT |
|
|
PWM控制開關(guān) ENABLE |
|
|
控制開關(guān)DISABLE輸出值 DIS_VAL |