
1 控制方案設(shè)計(jì)
溫度場(chǎng)是一個(gè)梯度場(chǎng),溫度的上升或下降隨時(shí)間緩慢變化。電加熱爐溫度控制過程可以用自然降溫、程序升溫和恒溫保持3個(gè)分過程來描述。自然降溫:停止加熱,環(huán)境溫度在整個(gè)過程中保持不變,受控溫度場(chǎng)最終穩(wěn)定為環(huán)境溫度。程序升溫過程:給定電壓值為一變化值,由程序控制逐漸變化,最終使?fàn)t溫的穩(wěn)定在給定值上。恒溫保持:給定爐溫為一定值,使?fàn)t溫穩(wěn)定在給定值上,這時(shí)受控場(chǎng)溫度恰好抵消散熱因素的影響而能夠維持在所設(shè)定的溫度。實(shí)驗(yàn)和經(jīng)驗(yàn)表明,電加熱爐對(duì)象可近似為一個(gè)純滯后環(huán)節(jié)和一個(gè)慣性環(huán)節(jié)組成,其傳遞函數(shù)為:

τ為純滯后時(shí)間,K為放大倍數(shù),T為慣性時(shí)間。在滯后時(shí)間和慣性時(shí)間均不太大、控制對(duì)象非線性小,參數(shù)時(shí)變性小的場(chǎng)合,RID控制是一種最直接最有效的控制方法。本文采用數(shù)字PID控制技術(shù),設(shè)計(jì)了一個(gè)實(shí)驗(yàn)室可用、中小型的、溫度在環(huán)境溫度至此320℃范圍內(nèi)可調(diào)的電加熱爐溫度控制系統(tǒng),系統(tǒng)結(jié)構(gòu)如圖1所示。

圖1 爐溫度控制系統(tǒng)結(jié)構(gòu)
系統(tǒng)采用溫度傳感器對(duì)爐膛內(nèi)的實(shí)時(shí)溫度進(jìn)行檢測(cè)、轉(zhuǎn)換、采樣,所得的檢測(cè)信號(hào)經(jīng)A/D轉(zhuǎn)換器轉(zhuǎn)換成數(shù)字信號(hào)進(jìn)入單片機(jī),并與單片機(jī)內(nèi)預(yù)先設(shè)定的溫度給定值加于比較得出偏差,偏差送入控制器,單片機(jī)執(zhí)行偏差的PID數(shù)字運(yùn)算得到可控硅的觸發(fā)脈沖,并由這個(gè)觸發(fā)脈沖調(diào)節(jié)可控硅的導(dǎo)通時(shí)間,從而調(diào)節(jié)電爐絲與風(fēng)扇的兩端電壓形成控制作用,使?fàn)t溫保持恒定。
2 軟、硬件設(shè)計(jì)
2.1 硬件系統(tǒng)設(shè)計(jì)
控制器的核心是80C52單片機(jī),其硬件框圖如圖2所示。系統(tǒng)采用AD590溫度傳感器電路把溫度轉(zhuǎn)換成0~5V的電壓信號(hào),再由轉(zhuǎn)換器A/D 8080轉(zhuǎn)換成數(shù)字信號(hào)送入單片機(jī)80C52.單片機(jī)根據(jù)系統(tǒng)的給定溫度和實(shí)際測(cè)量值比較得出偏差,再利用PID算法求出控制量U(kT)。通過U(kT)來決定輸出觸發(fā)脈沖的寬度。從而控制可控硅的導(dǎo)通時(shí)間,最終達(dá)到控制溫度的目的。

圖2 系統(tǒng)硬件框圖
微機(jī)系統(tǒng)主要由CPU80C52,并行接口8255A,地址鎖存器74LS373構(gòu)成。
AD590是電流型溫度傳感器,用于精密溫度測(cè)量電路。在被測(cè)溫度一定時(shí),AD590相當(dāng)于一個(gè)恒流源,通過對(duì)電流的測(cè)量可得到所需要的溫度值。
A/D0808 是8位逐次逼近式A/D轉(zhuǎn)換器件,采用CMOS結(jié)構(gòu),包括8位的A/D轉(zhuǎn)換器、8通道的多路模擬開關(guān)和與微處理器相兼容的控制邏輯。8通道多路模擬開關(guān)能直接與8路單極性模擬信號(hào)中的任何一個(gè)相連。片內(nèi)還具有8路模擬開關(guān)通道地址鎖存器和地址譯碼器、電壓比較器、256R電阻T型分壓器、數(shù)字模擬開關(guān)陣譯碼器、逐次逼近寄存器SAR、邏輯控制與定時(shí)電路、輸出具有TTL電平標(biāo)準(zhǔn)的三態(tài)輸出數(shù)據(jù)鎖存緩沖器,直接掛接在單片機(jī)單片機(jī)的數(shù)據(jù)總線上。
單片機(jī)80C52是一種集CPU、RAM、ROM、I/O接口和中斷系統(tǒng)等部分于一體的器件,只需要外加電源和晶振就可實(shí)現(xiàn)對(duì)數(shù)字信息的處理和控制。
8255A芯片用來擴(kuò)展I/O口,它有3個(gè)輸入輸出端口,PA口接測(cè)量顯示的LCD液晶顯示器,PB口接給定溫度顯示的LCD液晶顯示器,PC口控制LCD的選通,8255A的地址通過鎖存器74L373選擇,這樣就很好的解決了單片機(jī)端口資源不足的問題,并且各個(gè)模塊功能清晰。
2.2 軟件系統(tǒng)設(shè)計(jì)
2.2.1 程序流程
程序流程如圖3所示。系統(tǒng)程序包括主程序、對(duì)80C52單片機(jī)硬件電路的初始化、顯示程序、鍵盤處理程序等。控制器的軟件主要包括兩部分:監(jiān)控程序和控制程序。監(jiān)控程序的主要功能包括初始化設(shè)置、內(nèi)存清零、定時(shí)采樣、鍵位操作和顯示等。控制程序的主要功能包括定時(shí)、數(shù)據(jù)處理、溫度控制子程序等。該系統(tǒng)的軟件是在80C52單片機(jī)仿真開發(fā)環(huán)境下采甩基于51系列的C語言編寫的,用C語言來設(shè)計(jì)程序大大提高了開發(fā)調(diào)試的工作效率。

圖3 程序流程圖
2.2.2 溫度控制算法設(shè)計(jì)
PID控制器具有結(jié)構(gòu)簡(jiǎn)單、穩(wěn)定性好、工作可靠、調(diào)整方便等優(yōu)點(diǎn),是控制理論中技術(shù)最成熟、應(yīng)用最廣泛應(yīng)的一種控制技術(shù)。所謂的PID控制,就是按偏差的比例、積分、微分進(jìn)行控制。想模擬PID調(diào)節(jié)器的控制規(guī)律為:

式中u(t)是PID調(diào)節(jié)器的輸出量,e(t)是PID調(diào)節(jié)器的輸入量,Kp為比例系數(shù),Ti為積分時(shí)間常數(shù),Td為微分時(shí)間常數(shù)。
PID控制的形式多種多樣,常用的通常有位置式和增量算式。根據(jù)對(duì)象的特點(diǎn),該系統(tǒng)采用PID增量式控制算法。所謂的PID的增量算式,就是根據(jù)式(3)計(jì)算出u(kT-T),通過計(jì)算△u(kT)=u(kT)-u(kT-T)得到PID增量算△u(kT),即第k次采樣輸出算式為:
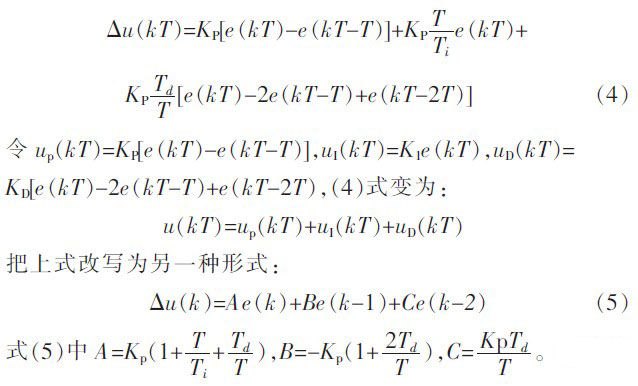
在計(jì)算機(jī)系統(tǒng)中,一般采用恒定的采樣周期T,當(dāng)確定了Kp、Ki、Kd時(shí),根據(jù)前后3次測(cè)量的偏差值就可以求出控制增量△u(kT)。增量式PID程序流程圖如圖4所示。
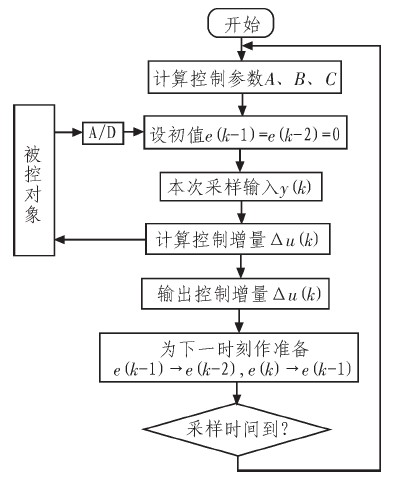
圖4 增量式PID程序流程圖
3 實(shí)驗(yàn)結(jié)果與系統(tǒng)仿真
在Keilu Vision3中建立一個(gè)文件,在代碼框中輸入程序代碼,檢查調(diào)試代碼無誤后運(yùn)行程序生成。HEX文件,打開PROTEUS的原理圖編輯及仿真界面,并在界面中打開事先設(shè)計(jì)好的電路圖,最后把轉(zhuǎn)換好的二進(jìn)制文件加載入80C52單片機(jī),點(diǎn)擊運(yùn)行調(diào)試按鈕就可以進(jìn)行硬件和軟件的仿真。
該系統(tǒng)爐溫在一定范圍內(nèi)根據(jù)實(shí)際控制對(duì)象可以人工設(shè)定,圖5為電加熱爐溫度設(shè)定值在50、100、150和300℃時(shí)的升溫曲線圖。從圖中可以看出,爐溫獲得了良好的控制,各項(xiàng)指都達(dá)了電加熱爐加熱對(duì)象要求起跳快、調(diào)量小、控制平穩(wěn)的技術(shù)指標(biāo)。
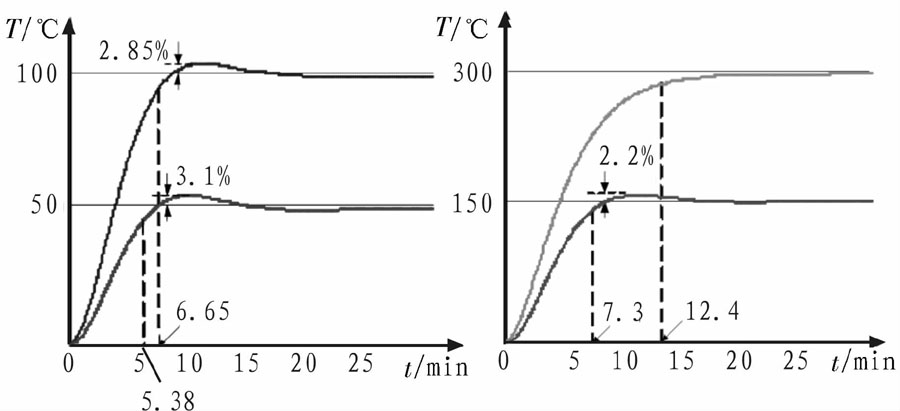
圖5 電加熱爐溫度設(shè)定值在50、100、150和300℃時(shí)的升溫曲線圖
4 結(jié)束語
該系統(tǒng)經(jīng)驗(yàn)證能充分實(shí)現(xiàn)溫度的實(shí)時(shí)控制與顯示、設(shè)定顯示,達(dá)到智能數(shù)字控制儀表的要求。試驗(yàn)表明,該系統(tǒng)具有良好的升溫、降溫特性,靜態(tài)、動(dòng)態(tài)指標(biāo)均達(dá)到了控制要求,系統(tǒng)精度高,自適應(yīng)能力強(qiáng),可靠性高,抗干擾性強(qiáng),控制界好等特點(diǎn)。系統(tǒng)的超調(diào)量小于4%,調(diào)節(jié)時(shí)間在溫30~100范圍內(nèi)均6 min小于,爐溫達(dá)剄了很好在控制效果。改小溫度設(shè)定值,該系統(tǒng)可應(yīng)用于孵蛋、細(xì)菌培育等場(chǎng)合恒溫控制。該控制器的設(shè)計(jì)方法在熱處理、化工、機(jī)械加工、金屬冶煉等行業(yè)爐溫控制器設(shè)計(jì)中具有一定的借鑒意義和推廣價(jià)值。