
引言
本文介紹了單片機Atmega128在一種衛(wèi)星地面測控系統(tǒng)中的應(yīng)用,該系統(tǒng)利用Atmega128完成了10路模擬信號的測量、4路脈沖信號的頻率測量以及脈沖寬度的測量,由單片機上的16位定時計數(shù)器輸出兩路與輸入信號具有相位關(guān)系的信號,并通過外擴串口與其它測試模塊及工控機進行通信。由于要求系統(tǒng)能夠連續(xù)穩(wěn)定工作3年,并且數(shù)據(jù)不能丟失,因此,在設(shè)計時采用了雙電源冗余熱備份的方案,并且采用兩個工控機同時接收數(shù)據(jù)并互為備份的設(shè)計方案。
硬件設(shè)計
Atmega128屬于Atmel公司的AVR系列單片機,是一種高性能、低功耗的8位控制器,執(zhí)行大多數(shù)指令只需要一個時鐘周期。其最高主頻可達到16MHz;自帶128KB可在線編程的閃存、4KB的EEPROM、4KB的SRAM,程序可進行加密;自帶JTAG接口,便于程序的調(diào)試;集成外設(shè):兩個8位定時計數(shù)器、兩個16位定時計數(shù)器、兩個8位PWM通道、6個16位PWM通道、8個10位 ADC通道、一個I2C接口、兩個可編程異步串行接口、一個SPI接口、一個看門狗定時器和8個外部中斷源。
衛(wèi)星地面測控系統(tǒng)主要由電源模塊、電子機箱、測試箱、工控機以及紅外地球敏感器構(gòu)成,系統(tǒng)結(jié)構(gòu)如圖1所示。其中兩臺電源并聯(lián), 輸出串聯(lián)二極管。在整個測控系統(tǒng)中,測試箱的控制功能是通過Atmega128完成的。

測試箱的硬件原理如圖2所示。測試系統(tǒng)以AVR單片機為核心,外圍電路由串口通信、ADC采樣和DAC輸出等部分構(gòu)成。
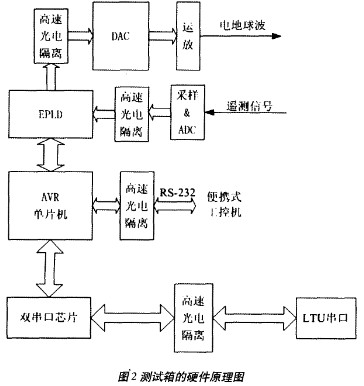
單片機與工控機之間通過RS-232標準總線進行數(shù)據(jù)通信,在設(shè)計中采用電平轉(zhuǎn)換芯片MAX202來實現(xiàn)二者的電平兼容。為了能夠和測試系統(tǒng)的其它模塊進行串口通信,采用Xicor公司的雙串口芯片ST16C2552外擴了兩個串口,由于與外擴串口通信的是-12V~+12V的信號,不是標準電平,因此,要另外設(shè)計電平轉(zhuǎn)換電路。使用Altera公司的可編程邏輯器件EPM7128實現(xiàn)對DAC和ADC的邏輯控制;使用BB公司的12位ADC實現(xiàn)對遙測信號的測量;采用BB公司的12位DAC芯片DAC7615產(chǎn)生電地球波信號。
具體功能如下:
ADC測量:將輸入的10路模擬信號經(jīng)過阻抗匹配后連接到通道選擇器,再接到ADC芯片ADS7835的信號輸入端,ADC的輸出信號以及控制信號經(jīng)過光隔離接到EPLD邏輯,在邏輯內(nèi)部實現(xiàn)對ADC啟動信號、轉(zhuǎn)換通道的選擇,以及對時鐘信號、數(shù)據(jù)信號的控制。
DAC 輸出:單片機通過邏輯芯片實現(xiàn)對DAC的片選、時鐘、數(shù)據(jù)等信號的控制,DAC的輸出信號通過光隔離后,再經(jīng)過運算放大器進行阻抗匹配后才接到整個測試系統(tǒng)的其它模塊。DAC參考電壓的穩(wěn)定性至關(guān)重要,如果參考電壓穩(wěn)定性差,將導(dǎo)致整個DAC的輸出波動很大,達不到輸出精度要求,因此,通過一個穩(wěn)壓芯片 AD584給DAC提供參考電壓。
頻率測量:電測箱需要對2路基準信號和2路光柵信號進行測量,利用AVR單片機的外部中斷和計數(shù)器1、3實現(xiàn)測量。將2路基準信號分別接到單片機的外中斷INT0和INT1,將光柵信號分別接到單片機的計數(shù)器1和3。在電測箱需要實現(xiàn)的各項功能中,電地球波的輸出是一個難點,因為需要電地球波的輸出與基準信號具有相位關(guān)系,并且要求輸出具有可變相位、幅度和斜率的信號,本文通過計數(shù)器1和3的比較中斷實現(xiàn)電地球波的輸出。
串口通信:通過單片機自帶的兩個異步串口,并經(jīng)過電平轉(zhuǎn)換與上位工控機通信,通過雙串口芯片ST16C2552外擴兩個串口與測試系統(tǒng)的其它模塊通信,此外,為保證系統(tǒng)的可靠性,所有的信號均經(jīng)過光隔離。
軟件實現(xiàn)
單片機軟件
運行在單片機的底層軟件主要負責(zé)ADC的采集、DAC的輸出以及串口的通信,下面詳細介紹各個部分:
1、 光柵頻率測量:測量模擬基準一個周期內(nèi)的光柵個數(shù)
在程序中,每次進入外中斷0的處理程序void int0_isr(void)(即基準脈沖上升沿到來時)調(diào)用void do_gd_opt_frq()函數(shù)測量光柵頻率。
在do_gd_opt_frq ()函數(shù)中,先把前一次讀取計數(shù)器1的計數(shù)值保存在全局變量time1_prev中,再讀取計數(shù)器1的值并保存在time1_next中,因為兩次中斷的間隔就是模擬基準的周期,有一個光柵脈沖計數(shù)器1就加1,所以,前后兩次的差值就是一個模擬基準周期內(nèi)光柵的個數(shù)。
2、 模擬基準幅度
在INT0的中斷處理函數(shù)中置一個全局標志refoa_gd_flag = 0xff,在一個100?s的定時器的中斷處理函數(shù)中查詢此全局標志,若置位,則對模擬基準的ADC通道連續(xù)采樣400次,采樣后清 refoa_gd_flag標志并置采樣結(jié)束的標志refoa_gd_finished = 0xff。在主程序main()函數(shù)中不斷查詢refoa_gd_finished標志,若置位,則調(diào)用do_refoa_high()函數(shù)求出模擬基準幅度,然后清標志。在do_refoa_high()函數(shù)中求出采樣400個點中的最大值和最小值,兩者之差即為模擬基準幅度。
3、 模擬基準周期:測量一個模擬基準周期的毫秒值
在一個1ms的定時器溢出中斷處理函數(shù)中,全局的計數(shù)變量ref_gd_count加1,ref_gd_count初始化為0。在外中斷0的處理函數(shù) int0_isr()中讀取ref_gd_count的值,即為模擬基準的周期,再把ref_gd_count清零。這樣,只有第一次測量值是無效的,以后均為有效的模擬基準周期。
4、 模擬基準寬度
在INT0的中斷處理函數(shù)中置全局變量refoa_width_gd_ count=0,在100?s的定時器中斷中查詢外中斷0的引腳是否為高電平,是高電平則refoa_width_gd_count加1,直至變?yōu)榈碗娖剑瑀efoa_width_gd_ count的值就是模擬基準的寬度。
5、 電地球波
在do_ein()函數(shù)中處理工控機串口傳過來的電地球波信息,如果是停止電地球波命令(state=0),通過DA電地球波直接輸出高電平并清除電地球波使能標志位ein_gd_enable。如果是開始電地球波命令(state=1),把相位、寬度、幅值、斜率等信息賦給全局變量保存,并且計算出步距和斜率上各個點的輸出值,置位電地球波使能標志 ein_gd_enable。
電地球波的產(chǎn)生是以模擬基準為基準的,在INT0的中斷處理函數(shù)中設(shè)置計數(shù)器的比較中斷并使能。
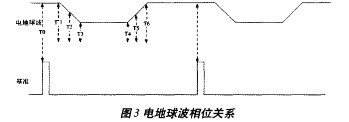
圖3中, T0與T1 之間是地球波的相位,T2與T5之間是地球波的寬度。在T1時刻進入計數(shù)器1的比較中斷timer1_compa_isr(),全局變量 ein_count_gd初始化為0,若ein_count_gd不等于1,則設(shè)置比較中斷寄存器初值為下一步距點,并通過DA輸出,若下一個比較中斷到來ige ein_count_gd不等于1,則繼續(xù)設(shè)置比較中斷寄存器初值為下一個步距,并輸出幅值,直到斜率上所有的幅值輸出完畢,置ein_count_gd 等于1并設(shè)置比較中斷寄存器,使T4進入比較中斷。T4進入比較中斷,并按照前述方法輸出斜率上所有的幅值,完畢則禁止比較中斷并置 ein_count_gd=0xff。
ADC采集和串口通信比較簡單,這里不再贅述。
軟件編譯與下載
由于單片機程序是采用C語言設(shè)計完成的,因此,需要用Image Craft公司的ICCAVR編譯器進行編譯,生成COF文件,再用AVR STUDIO調(diào)試軟件和雙龍公司的AVR JTAG仿真器進行調(diào)試。調(diào)試完成后,利用單片機的JTAG接口寫入內(nèi)部閃存即可。
上位工控機軟件
運行在工控機上的軟件主要負責(zé)處理AVR單片機通過串口傳送過來的數(shù)據(jù)并進行超差、報警的檢查,然后把數(shù)據(jù)存儲在ACCESS數(shù)據(jù)庫中,以便查看。該軟件能夠設(shè)置電地球波的幅度、寬度、相位,并能自主控制電地球波的產(chǎn)生或停止。
上位工控機軟件采用VC6.0編寫,其中的數(shù)據(jù)庫部分采用ADO技術(shù)。ADO是Microsoft公司為最新和最強大的數(shù)據(jù)訪問范例 OLE DB 而設(shè)計的,是一個便于使用的應(yīng)用程序?qū)咏涌凇DO 最主要的優(yōu)點是易于使用、速度快、內(nèi)存支出少且磁盤遺跡小。
結(jié)語
采用Atmel公司的AVR系列單片機進行系統(tǒng)設(shè)計,其外圍設(shè)備豐富、集成開發(fā)環(huán)境簡單易用、支持在線仿真等特點使得系統(tǒng)的開發(fā)周期大大縮短。本文介紹的系統(tǒng)使用了很多Atmega128的外圍資源,并通過Atmega128提供的定時計數(shù)器的比較中斷解決了系統(tǒng)設(shè)計中的難題。