
為實(shí)現(xiàn)高速公路車輛超寬超高治理工作的自動(dòng)化、智能化,設(shè)計(jì)了一種基于激光脈沖測(cè)距技術(shù)的智能車輛寬高檢測(cè)系統(tǒng)。系統(tǒng)采用LMS二維激光測(cè)距傳感器,在新型高性能微處理器的控制下,對(duì)車輛輪廓進(jìn)行高速動(dòng)態(tài)掃描,將所接收到的實(shí)時(shí)數(shù)據(jù)進(jìn)行分析處理,實(shí)現(xiàn)對(duì)行進(jìn)車輛的寬高檢測(cè)和超限聲光報(bào)警。實(shí)驗(yàn)結(jié)果表明,系統(tǒng)測(cè)量精度為±0.15m,測(cè)量準(zhǔn)確率達(dá)到95%,系統(tǒng)性能滿足高速公路管理部門對(duì)于車輛寬高超限檢測(cè)的要求。
隨著我國(guó)經(jīng)濟(jì)的快速發(fā)展,高速公路建設(shè)和公路運(yùn)輸規(guī)模都得到了前所未有的發(fā)展,由此帶來(lái)的車輛超限超載現(xiàn)象也日益嚴(yán)重。超限運(yùn)輸一方面會(huì)縮短公路和橋梁的使用壽命,另一方面會(huì)造成車體形狀的改變及車輛性能的下降,形成交通安全的嚴(yán)重隱患。目前,車輛超寬超高治理作為治超工作的重要組成部分,大多還處于人工階段,主要由工作人員用卷尺或者竹竿實(shí)測(cè)寬高,既增加了工作人員的工作量,又降低了工作效率。為實(shí)現(xiàn)超竟超高治理工作的自動(dòng)化和智能化,采用激光測(cè)距技術(shù),選用基于ARM Cortex-M3內(nèi)核的處理器LM3S8962,設(shè)計(jì)開(kāi)發(fā)了一套智能車輛寬高檢測(cè)系統(tǒng)。本系統(tǒng)可對(duì)行進(jìn)車輛進(jìn)行高精度動(dòng)態(tài)掃描,實(shí)現(xiàn)寬高檢測(cè)。
1 激光測(cè)距傳感器的選擇
激光以其高亮度、高方向性、高單色性等優(yōu)點(diǎn),被廣泛應(yīng)用于各種測(cè)量領(lǐng)域中。激光測(cè)距相比紅外測(cè)距,超聲波測(cè)距等方式,具有速度快,實(shí)時(shí)性強(qiáng),獲取數(shù)據(jù)精度高等特點(diǎn)。激光測(cè)距技術(shù)已在汽車防撞,建筑或空地安全監(jiān)護(hù),軌道交通等領(lǐng)域得到了廣泛地應(yīng)用。為了滿足高速公路車輛寬高檢測(cè)系統(tǒng)測(cè)量速度快,測(cè)量精度高的要求,還考慮到系統(tǒng)能在能見(jiàn)度較差的環(huán)境甚至夜間工作,系統(tǒng)選用德國(guó)SICK公司生產(chǎn)的LMS型雙脈沖激光測(cè)距傳感器。
LMS激光傳感器是一種戶外型非接觸式的高精度、高解析度外部傳感器,其工作原理是基于對(duì)激光束飛行時(shí)間的測(cè)量,其按照定義好的時(shí)間間隔發(fā)出激光脈沖,通過(guò)定時(shí)器計(jì)算發(fā)射脈沖和接收脈沖之間的時(shí)間間隔來(lái)得到與被測(cè)物體之間的距離。脈沖激光束經(jīng)過(guò)測(cè)距傳感器內(nèi)部的一個(gè)旋轉(zhuǎn)反光鏡的反射對(duì)周圍環(huán)境形成扇面掃描。激光掃描測(cè)距的工作原理如圖1所示。
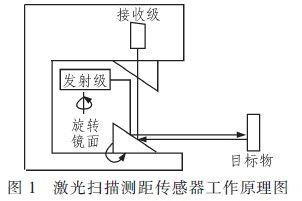
目標(biāo)物體的輪廓線由所接收剄的一系列脈沖序列來(lái)確定。LMS激光傳感器的掃描頻率是25 Hz/50 Hz,角度頻率是0.25°/0.5°,掃描角度范圍是0°~270°,最大掃描距離是20 m,標(biāo)準(zhǔn)測(cè)量精度為±30 mm,安全防護(hù)等級(jí)為IP67,對(duì)人眼安全。惡劣的環(huán)境因素對(duì)測(cè)量范圍沒(méi)有影響,可用于室外溫度-30~+50℃的環(huán)境中。
2 系統(tǒng)構(gòu)成及工作原理
智能車輛寬高檢測(cè)系統(tǒng)通過(guò)對(duì)車輛進(jìn)行連續(xù)動(dòng)態(tài)掃描,采集車輛的外形輪廓信息,并將采樣數(shù)據(jù)實(shí)時(shí)傳遞給控制單元,控制單元通過(guò)處理、分析、計(jì)算采樣數(shù)據(jù),得出車輛實(shí)際的寬度和高度,并將測(cè)量值顯示在液晶屏上,供現(xiàn)場(chǎng)工作人員查看,同時(shí)根據(jù)國(guó)家規(guī)定的限寬值和限高值判斷被測(cè)車輛能否通行。本系統(tǒng)能夠手動(dòng)設(shè)定限寬值和限高值,可以對(duì)行進(jìn)車輛進(jìn)行實(shí)時(shí)檢測(cè),具有聲光報(bào)警和語(yǔ)音提示功能。系統(tǒng)在實(shí)際應(yīng)用時(shí),要求行進(jìn)車輛車速控制在20km/h以下。實(shí)時(shí)快速測(cè)量也可避免交通擁堵現(xiàn)象。
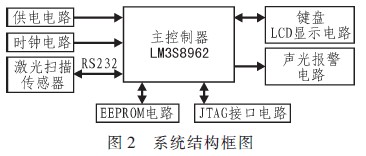
智能車輛寬高檢測(cè)系統(tǒng)選用LM3S8962作為主控制器。LM3S8962是一款基于ARMCortex-M3內(nèi)核的低功耗、高速度處理器。LMS激光傳感器通過(guò)500kb/s的高速串行接口將測(cè)量數(shù)據(jù)傳送給主控制器,不會(huì)造成數(shù)據(jù)的丟失。控制器將接收到的掃描數(shù)據(jù)進(jìn)行處理,由于其內(nèi)部數(shù)據(jù)存儲(chǔ)器空間大,不需外擴(kuò)數(shù)據(jù)存儲(chǔ)器。系統(tǒng)結(jié)構(gòu)框圖如圖2所示。
3 硬件電路設(shè)計(jì)
智能車輛寬高檢測(cè)系統(tǒng)電氣控制部分以基于ARMCortex-M3內(nèi)核的LM3S8962處理器作為控制核心,按功能可劃分為以下模塊:電源模塊,主控制器模塊、時(shí)鐘模塊、數(shù)據(jù)通訊模塊、鍵盤輸入模塊、液晶顯示模塊、繼電器控制模塊等,以下對(duì)3個(gè)部分作較詳細(xì)介紹。
3.1 主控制器模塊設(shè)計(jì)
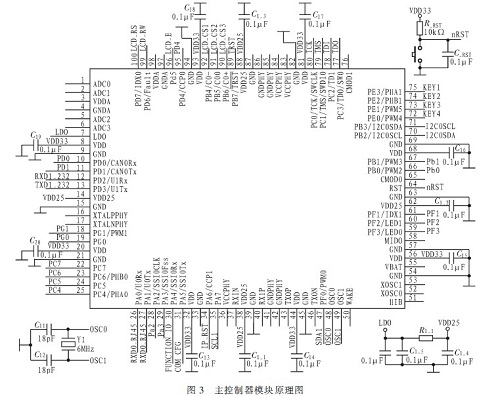
采用ARM Cortex-M3內(nèi)核的微控制器LM3S8962作為系統(tǒng)控制核心。Cortex-M3內(nèi)核采用ARMv7-M架構(gòu),它緊湊地結(jié)合Thumb-2指令集,采用哈佛處理器架構(gòu),與ARM7TDMI相比,比Thumb指令每兆赫的效率提高了70%,比ARM指令提高35%。由于Thumb-2指令是Thumb指令的擴(kuò)展,16位和32位指令共存于同一模式下,復(fù)雜性大幅下降,代碼密度和性能均得到提高。LM3S8962時(shí)鐘頻率高達(dá)50 Hz,多達(dá)36個(gè)中斷源具有8個(gè)優(yōu)先等級(jí),提供系統(tǒng)時(shí)鐘,256 kB的FALSH,64 kB的SRAM,休眠模塊,通用異步收發(fā)器,通用定時(shí)器,PC接口以及其他豐富的外設(shè)接口,可方便的對(duì)各種現(xiàn)場(chǎng)設(shè)備進(jìn)行有效控制。圖3為L(zhǎng)M3S8962的外設(shè)接口及其外圍電路(時(shí)鐘、復(fù)位、UART接口等)。
3. 2 數(shù)據(jù)通訊模塊設(shè)計(jì)
將激光傳感器掃描得到的極值坐標(biāo)信號(hào)通過(guò)通用異步收發(fā)器(UART)傳送給微控制器,選用了MAX232進(jìn)行RS232電平轉(zhuǎn)換,如圖4所示。
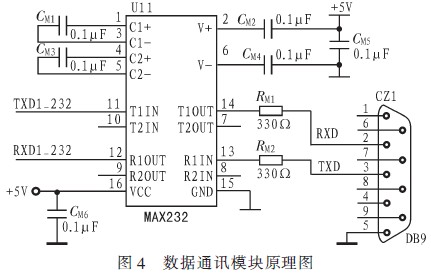
LM3S8962具有兩個(gè)串行接口UART0和UART1。本系統(tǒng)選用UART1用于RS232通信使用。UART是一種應(yīng)用廣泛的短距離串行傳輸接口,通信雙方只要采用相同的幀格式和波特率,僅用兩根信號(hào)線(Rx和Tx)就可以完成通信過(guò)程,有獨(dú)立的發(fā)送FIFO和接收FIFO。有可編程的波特率發(fā)生器,允許速率高達(dá)460.8 kb/s。系統(tǒng)中通過(guò)UART傳送的數(shù)據(jù)高速存儲(chǔ)于SRAM存儲(chǔ)器內(nèi)供微控制器進(jìn)行實(shí)時(shí)快速計(jì)算。
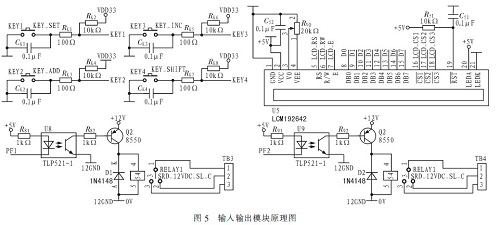
3.3 輸入輸出模塊設(shè)計(jì)
系統(tǒng)設(shè)置了4個(gè)按鍵,用于設(shè)置車輛的限寬限高值,設(shè)置及修改系統(tǒng)時(shí)間等,實(shí)現(xiàn)了隨時(shí)修改信息的功能。為了便于工作人員查看過(guò)往車輛的寬度和高度,采用了LCD顯示。選用青云創(chuàng)新公司生產(chǎn)的LCD液晶顯示模塊LCM192642,它是漢字圖形點(diǎn)陣液晶顯示模塊,可顯示漢字和圖形。模塊工作電源為5 V;改變變位器W1的值可以調(diào)節(jié)LCD屏的顯示對(duì)比度;整個(gè)LCD屏被均分為三部分16~18是選屏信號(hào)線,可以選擇其中任一部分顯示。系統(tǒng)中設(shè)置了2個(gè)12V繼電器,當(dāng)行駛車輛經(jīng)檢鍘超過(guò)了標(biāo)準(zhǔn)的寬度和高度時(shí)系統(tǒng)會(huì)通過(guò)繼電器分別接通警燈和室外擴(kuò)音器的電源而產(chǎn)生聲光報(bào)警,一方面提示現(xiàn)場(chǎng)工作人員進(jìn)行處理,另一方面告知司機(jī)該車超限需停車接受處理。如下圖5所示為輸入輸出模塊原理圖。
4 系統(tǒng)軟件設(shè)計(jì)
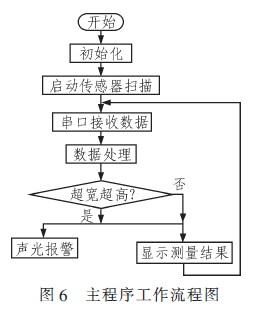
本系統(tǒng)采用LAR5.11作為開(kāi)發(fā)環(huán)境,使用C語(yǔ)言編程,采用模塊化程序設(shè)計(jì)。軟件設(shè)計(jì)分為主控模塊、初始化模塊、中斷處理模塊、數(shù)據(jù)發(fā)送和接收模塊、數(shù)據(jù)處理模塊、鍵盤和顯示模塊等幾部分。主程序工作流程圖如圖6所示。系統(tǒng)上電后,首先完成系統(tǒng)初始化,然后給傳感器發(fā)命令,啟動(dòng)傳感器掃描,接收串口發(fā)來(lái)的數(shù)據(jù),從串口緩沖區(qū)提取所需數(shù)據(jù),根據(jù)數(shù)據(jù)信息進(jìn)行轉(zhuǎn)換,判斷,比較,存儲(chǔ)。進(jìn)行數(shù)據(jù)分析處理后調(diào)用相應(yīng)的執(zhí)行子程序完成相應(yīng)的功能,如調(diào)用LCD子程序顯示車輛寬高信息等,程序進(jìn)入不斷循環(huán)工作狀態(tài)。
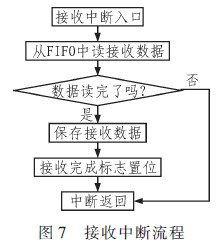
數(shù)據(jù)采集使用串口通訊模式,發(fā)送數(shù)據(jù)采用查詢方式完成,接收數(shù)據(jù)采用中斷方式完成,接收中斷流程如圖7所示。傳感器和主控制器之間通過(guò)事先約定的通訊協(xié)議進(jìn)行數(shù)據(jù)收發(fā),主控制器只需設(shè)置好相應(yīng)的串口號(hào)、波特率及相應(yīng)端口設(shè)量,發(fā)送測(cè)量命令,等待接收。單次讀數(shù)據(jù)命令為:RNLMDscandatata;連續(xù)讀數(shù)據(jù)命令為:EN LMDscandata1;連續(xù)停數(shù)據(jù)命令為:EN LMDscandata0。
5 模擬實(shí)驗(yàn)
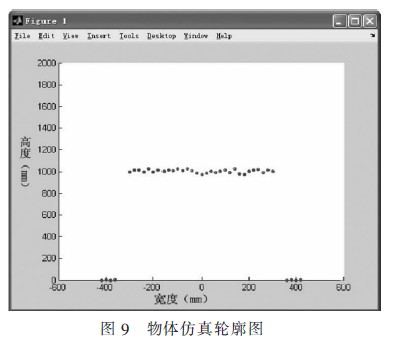
系統(tǒng)整體設(shè)計(jì)完成后,在進(jìn)入超限點(diǎn)進(jìn)行現(xiàn)場(chǎng)調(diào)試之前,在實(shí)驗(yàn)室進(jìn)行了模擬實(shí)驗(yàn)。將激光傳感器固定在3 m高的支架上,讓一放置立方體被測(cè)物的小推車以10km/h的速度從激光傳感器下經(jīng)過(guò),如圖8所示。將激光傳感器設(shè)置在掃描角度為0°~180°,角度分辨率為0.5°的模式下,當(dāng)小推車完全經(jīng)過(guò)時(shí),液晶屏上即可顯示立方體被測(cè)物的最大寬度和高度,同時(shí)可通過(guò)MATLAB仿真物體的輪廓,如圖9所示。同等條件下,讓小推車在傳感器下先后通過(guò)數(shù)次后統(tǒng)計(jì)結(jié)果,將測(cè)量值和實(shí)際值比較可得誤差在0.15m以內(nèi)的達(dá)到95%,符合測(cè)量精度要求。

6 結(jié)束語(yǔ)
針對(duì)高速公路車輛超限超載這一問(wèn)題,設(shè)計(jì)了基于激光測(cè)距技術(shù)的寬高檢測(cè)系統(tǒng),可實(shí)現(xiàn)對(duì)行進(jìn)車輛進(jìn)行實(shí)時(shí)動(dòng)態(tài)測(cè)量。本系統(tǒng)在實(shí)驗(yàn)期間,工作可靠穩(wěn)定,功耗低,計(jì)算速度快,測(cè)量精度高,抗干擾能力強(qiáng),實(shí)驗(yàn)誤差符合高速公路管理部門對(duì)于行進(jìn)車輛寬高超限檢測(cè)的要求。通過(guò)反復(fù)實(shí)驗(yàn)驗(yàn)證,該設(shè)計(jì)有效可行,為下一階段進(jìn)入現(xiàn)場(chǎng)進(jìn)行實(shí)地調(diào)試作了充分準(zhǔn)備。