
0 引言
智能電網(wǎng)的發(fā)展,對(duì)低壓電器的智能化提出了較高的要求,目前國(guó)內(nèi)使用較多的小型斷路器的智能化穩(wěn)定性不夠,在于其體積較小,將信號(hào)采集電路、動(dòng)作執(zhí)行和智能脫扣器都安裝在本體內(nèi),開(kāi)關(guān)內(nèi)的強(qiáng)電場(chǎng)產(chǎn)生的電磁干擾和高溫,使得斷路器可靠性降低。本文介紹的智能控制器脫離于斷路器本體,并且能夠連接多個(gè)斷路器,實(shí)現(xiàn)對(duì)多個(gè)斷路器的監(jiān)控。
1 控制器的總體結(jié)構(gòu)
群組智能控制器的核心采用DSP TMS320F2812芯片,輔以CPLD EPM3128芯片來(lái)實(shí)現(xiàn)鍵盤(pán)和液晶的時(shí)序邏輯,減少擴(kuò)展芯片帶來(lái)的體積問(wèn)題,外圍電路主要包括信號(hào)調(diào)理電路和脫扣控制電路等。為適應(yīng)智能電網(wǎng)的無(wú)線通信,在智能控制器中添加GPRS模塊,使得斷路器能夠更好地融入到智能電網(wǎng)中。
2 控制器的硬件設(shè)計(jì)
所采集的多個(gè)斷路器的電壓、電流等信號(hào),經(jīng)過(guò)信號(hào)調(diào)理電路進(jìn)行調(diào)理后送入DSP處理器,經(jīng)過(guò)信號(hào)的變換、運(yùn)算和判斷等處理,斷路器有故障時(shí)通過(guò)脫扣電路實(shí)現(xiàn)脫扣。系統(tǒng)總體結(jié)構(gòu)框圖如圖1所示。

2.1 信號(hào)調(diào)理電路模塊設(shè)計(jì)
信號(hào)調(diào)理模塊的主要功能,一是低通濾波,濾除高頻噪聲;二是信號(hào)放大,由于檢測(cè)電流范圍較大,為適應(yīng)較大的動(dòng)態(tài)范圍,提高A/D采樣分辨率,使變換后的數(shù)字信號(hào)盡可能準(zhǔn)確反映模擬信號(hào)的大小,設(shè)計(jì)了兩路放大環(huán)節(jié)。一路有較大的放大倍數(shù),放大小電流時(shí)的信號(hào);另一路放大倍數(shù)較小,進(jìn)行大電流時(shí)的信號(hào)放大。因?yàn)锳/D轉(zhuǎn)換器的信號(hào)輸入范圍有限,為防止大電流信號(hào)時(shí)產(chǎn)生過(guò)高的輸入電壓,對(duì)檢測(cè)電路和A/D轉(zhuǎn)換器造成損壞,設(shè)計(jì)了電平限幅保護(hù)電路。

圖2為每一相大電流信號(hào)濾波、平移、放大和限幅電路。由于A/D轉(zhuǎn)換器輸入電壓范圍為0~3 V;而輸入信號(hào)是直流偏移電平為0 V的交變正弦波,所以設(shè)計(jì)電平偏移電路抬高電流信號(hào)。低通濾波和信號(hào)放大由兩級(jí)運(yùn)放組成。
2.2 脫扣電路模塊設(shè)計(jì)
脫扣電路分為數(shù)字脫扣與模擬脫扣數(shù)字脫扣電路較為簡(jiǎn)單,DSP通過(guò)I/O口輸出脫扣信號(hào),經(jīng)過(guò)光耦隔離放大驅(qū)動(dòng)磁通線圈。模擬脫扣電路采用比較器電平鑒幅電路實(shí)現(xiàn),每一相電流采用兩個(gè)比較器來(lái)完成,當(dāng)微處理器沒(méi)有發(fā)出脫扣信號(hào)且電流信號(hào)的幅值在參考基準(zhǔn)電壓范圍內(nèi),則比較器并聯(lián)輸出一高電平,否則為低電平。低電平信號(hào)通過(guò)脈寬檢測(cè)電路,進(jìn)行抗干擾處理。如果低脈沖維持一定的寬度則單穩(wěn)態(tài)觸發(fā)器被觸發(fā),同時(shí)輸出一定寬度的脈沖通過(guò)驅(qū)動(dòng)電路使磁通變換器打開(kāi),從而分?jǐn)鄶嗦菲鳌DM脫扣電路如圖3所示。
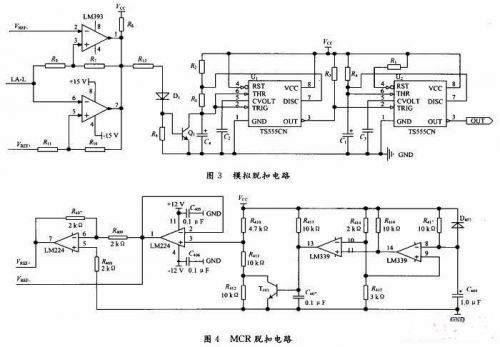
比較器電平鑒幅電路在實(shí)際應(yīng)用中,由于干擾的存在,比較器的輸出會(huì)出現(xiàn)一些不必要的窄脈沖,因此設(shè)計(jì)了脈寬檢測(cè)電路用于濾除干擾尖峰引起誤觸發(fā)脫扣動(dòng)作。在設(shè)計(jì)時(shí),當(dāng)輸入脈沖寬度大于1ms時(shí),輸出32.9ms的脫扣信號(hào);當(dāng)小于1ms時(shí),不輸出脫扣信號(hào)。
模擬脫扣電路在實(shí)際應(yīng)用中,上電初期的短路電流只在100 ms內(nèi)起作用,其后即在DSP初始化完畢開(kāi)始正常運(yùn)行,模擬脫扣電路則進(jìn)行特大短路電流的判斷,兩種不同情況,其電流定值不同。因此設(shè)計(jì)了可切換參考基準(zhǔn)電壓,即MCR分?jǐn)嘟油娐贰CR分?jǐn)嘟油娐吩谏想姵跗冢珻408兩端電壓較低,通過(guò)比較器輸出高電平,使得T401飽和導(dǎo)通,因此參考基準(zhǔn)電壓降低,即模擬脫扣動(dòng)作值較低,出現(xiàn)短路故障時(shí),實(shí)現(xiàn)MCR脫扣。上電穩(wěn)定后,C408兩端電壓升高,通過(guò)比較器輸出低電平,使得T401截止,此時(shí)參考基準(zhǔn)電壓較高,在出現(xiàn)特大短路電流時(shí),實(shí)現(xiàn)模擬脫扣,MCR脫扣電路如圖4所示。
2.3 GPRS通信模塊與DSP硬件接口設(shè)計(jì)
GPRS通信模塊采用SIEMENS公司的MC55GPRS模塊,軟件原理圖如圖5所示。DSP芯片F(xiàn)2812通過(guò)外部總線接口XINTF擴(kuò)展了一塊帶雙異步串口(UART)的TL16C752B芯片,和MC55 GPRS模塊相連。DSP芯片主要實(shí)現(xiàn)整個(gè)系統(tǒng)所需的協(xié)議以及監(jiān)測(cè)數(shù)據(jù)的采集、中心主站的命令的解析;GPRS模塊則完成無(wú)線通信功能。

3 控制器軟件設(shè)計(jì)
系統(tǒng)軟件主要完成信號(hào)采樣,脫扣算法,通信處理和按鍵顯示等功能。控制器的軟件設(shè)計(jì)采用匯編語(yǔ)言和C語(yǔ)言混合編程的方法進(jìn)行程序結(jié)構(gòu)優(yōu)化,以確保實(shí)時(shí)性。程序具有模塊化和子程序化的特點(diǎn),同時(shí)在程序設(shè)計(jì)中加入了抗干擾處理。主程序流程圖如圖6所示。

4 結(jié)語(yǔ)
本文詳細(xì)敘述了智能控制器系統(tǒng)各組成部分的設(shè)計(jì)過(guò)程,并給出了具體的電路圖。通過(guò)軟件與硬件系統(tǒng)測(cè)試表明,該智能控制器能夠較好地完成信號(hào)采集、無(wú)線通信和線路通斷控制功能。在后續(xù)的研究中,可采用嵌入式實(shí)時(shí)多任務(wù)操作系統(tǒng)μC/OS-Ⅱ作為系統(tǒng)軟件平臺(tái),實(shí)現(xiàn)μC/OS-Ⅱ在F2812上的移植。