
0引言
在工業(yè)測(cè)距場(chǎng)合中,由于工作要求和復(fù)雜環(huán)境常常采用非接觸測(cè)距的方法。激光、紅外線和超聲波是非接觸測(cè)距中較常采用的測(cè)量介質(zhì)。激光測(cè)距雖然測(cè)距精度高,操作簡(jiǎn)單,但是受環(huán)境的影響比較大,且系統(tǒng)檢測(cè)不易維護(hù),價(jià)格也比較昂貴。
紅外測(cè)距易受環(huán)境光照度和光線色彩的影響,而且測(cè)量精度不高。相比較前兩者,超聲波是機(jī)械波,具有不受光線影響,不受電磁干擾,成本低等特點(diǎn),能夠定點(diǎn)和連續(xù)測(cè)量物位,在有灰塵、煙霧、有腐蝕等惡劣環(huán)境下具有較好的適應(yīng)能力,廣泛應(yīng)用于物位測(cè)量、機(jī)械手控制、倒車?yán)走_(dá)、機(jī)器人避障以及其他一些工業(yè)現(xiàn)場(chǎng)等方面。因此,近些年來,人們對(duì)超聲測(cè)距進(jìn)行了很多的探討和研究。目前所研究的超聲波測(cè)距傳感器測(cè)距范圍普遍較小,線性度和重復(fù)性較差。文中所提出的研究方法能很好的解決這2個(gè)問題,在保證線性度和重復(fù)性均不低于1。5‰的前提下,測(cè)量范圍達(dá)到了5m以上。
1超聲波測(cè)距系統(tǒng)原理
目前超聲測(cè)距的方法中,廣泛采用的是回波時(shí)間法。該方法的主要原理是通過閾值比較或相位相關(guān)等方法檢測(cè)換能器從發(fā)射超聲波到收到回波信號(hào)的時(shí)間t,再根據(jù)測(cè)量時(shí)的超聲波速度v,求出距離s。計(jì)算公式是:

式中速度v 是環(huán)境溫度T 的函數(shù):
![]()
回波時(shí)間法測(cè)距的主要誤差來源于聲速的變化、回波信號(hào)的衰減以及接收閾值的設(shè)置。在測(cè)量回波時(shí)間上,閾值比較法測(cè)回波時(shí)間簡(jiǎn)單實(shí)用,但容易受到環(huán)境噪聲的影響;相位相關(guān)法相對(duì)于閾值比較法誤差小,不容易受到外界噪聲干擾,但是對(duì)微處理器的速度和存儲(chǔ)有很高的要求,會(huì)增加硬件和軟件的成本。
有別于回波時(shí)間法,另外一種廣泛采用的測(cè)距方法是相位差法,主要是根據(jù)機(jī)械波的波動(dòng)原理,2π的相位變化對(duì)應(yīng)的是機(jī)械波的1個(gè)波長(zhǎng),根據(jù)發(fā)射波和返回波的相位差計(jì)算波長(zhǎng)差,進(jìn)而得到距離值。這種方法測(cè)量精度高,但僅限于距離在1個(gè)波長(zhǎng)范圍內(nèi)的測(cè)量,而且相位差的鑒別也會(huì)大幅度增加設(shè)計(jì)成本。
認(rèn)真分析研究上述方法優(yōu)缺點(diǎn)后,文中在脈沖時(shí)間法的基礎(chǔ)上,利用閾值比較原理,超聲波發(fā)射模塊采用反激變換器提高超聲波的發(fā)射功率,接收模塊采用時(shí)控增益放大器準(zhǔn)確獲得回波信號(hào),最后測(cè)算出距離值。采用這兩種核心器件不僅使得測(cè)距系統(tǒng)電路結(jié)構(gòu)簡(jiǎn)單,設(shè)計(jì)成本低,而且測(cè)量范圍大,靜態(tài)特性良好。
2超聲測(cè)距系統(tǒng)
超聲波測(cè)距系統(tǒng)整體原理框圖如圖1所示。超聲波測(cè)距系統(tǒng)的主控部分是C8051f320單片機(jī),它是完全集成的混合信號(hào)片上系統(tǒng)型微處理器,具有高達(dá)25MIPS的高速流水線結(jié)構(gòu)的微控制器內(nèi)核,擁有全速非侵入式的在系統(tǒng)調(diào)試接口。在超聲波測(cè)距系統(tǒng)中采用這款微處理器的主要原因是它具有5個(gè)捕捉/比較模塊和具有看門狗定時(shí)器功能的可編程計(jì)數(shù)器/定時(shí)器陣列(PCA),這不僅使測(cè)算回波時(shí)間非常方便和準(zhǔn)確,而且可以同時(shí)控制5個(gè)超聲波測(cè)距模塊工作。
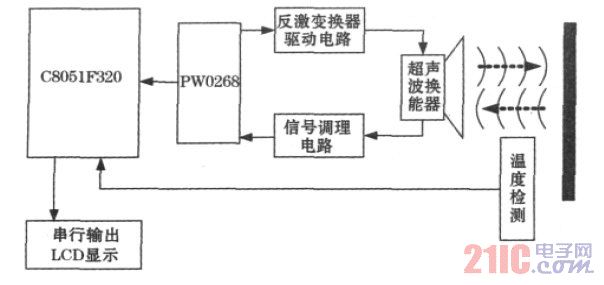
圖1 超聲波測(cè)距系統(tǒng)整體原理框圖
該測(cè)距系統(tǒng)的發(fā)射與接收部分主要是由反激變換器和專用集成電路PM0268構(gòu)成的。反激變換器相對(duì)于正激式的變換器的主要優(yōu)點(diǎn)是不需要輸出濾波電感,這一點(diǎn)對(duì)減小變換器體積,降低成本很重要。PW0268是超聲波測(cè)距的專用集成電路,片內(nèi)有兩組可調(diào)式RC振蕩器,1個(gè)是系統(tǒng)參考時(shí)基,另1個(gè)是超聲波振蕩頻率。超聲波RC振蕩器具有自動(dòng)變頻的功能,可以修正因溫度而造成換能器諧振頻率的飄移。片內(nèi)還集成了1個(gè)32階增益的時(shí)控放大器,它可以方便的補(bǔ)償超聲波在波程中幅值的衰減。PW0268還內(nèi)置1個(gè)僅需外加少量電阻及電容組成的帶通濾波器,以及1個(gè)高速比較器,可將放大后的回波信號(hào)轉(zhuǎn)換成微處理器可處理的TTL數(shù)字信號(hào)。
另外,由于集成了環(huán)境溫度補(bǔ)償和LCD顯示電路,該測(cè)距系統(tǒng)還具有聲速實(shí)時(shí)補(bǔ)償,測(cè)量結(jié)果實(shí)時(shí)顯示等功能。
3超聲波測(cè)距硬件電路設(shè)計(jì)
超聲波的發(fā)射與接收電路是超聲波測(cè)距的核心電路,主要包括反激變換器驅(qū)動(dòng)換能器電路和PW0268外圍電路的計(jì)算與設(shè)計(jì)。
3。1反激變換器驅(qū)動(dòng)電路
在超聲波發(fā)射電路中借鑒了開關(guān)電源中常用的反激變換器,對(duì)超聲波驅(qū)動(dòng)的電壓信號(hào)進(jìn)行了大幅度的抬升,使發(fā)出的超聲波信號(hào)足夠強(qiáng)以有利于回波信號(hào)的準(zhǔn)確判斷。驅(qū)動(dòng)電路如圖2所示。40kHz的脈沖串通過控制場(chǎng)效應(yīng)管不斷地通斷,使變換器原級(jí)電壓耦合到次級(jí)完成電壓抬升,驅(qū)動(dòng)換能器發(fā)出超聲波。其中,變換器的設(shè)計(jì)除了要考慮開關(guān)場(chǎng)效應(yīng)管的最大電壓應(yīng)力,還要著重考慮變換器原、次級(jí)電流有效值、磁芯飽和度以及與換能器阻抗匹配等問題。
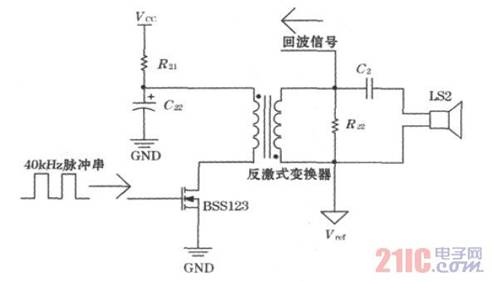
圖2反激變換器驅(qū)動(dòng)電路
3。2PW0268外圍電路
PW0268的I_O管腳是雙向管腳,當(dāng)一短暫的低電平脈沖加在此管腳時(shí),Driver_O管腳開始輸出超聲波振蕩驅(qū)動(dòng)信號(hào),之后PW0268內(nèi)部會(huì)啟動(dòng)1個(gè)計(jì)時(shí)信號(hào)(Tout),之后I_O管腳由輸入轉(zhuǎn)變?yōu)檩敵瞿J剑⒕S持在高電平狀態(tài)。在Tout計(jì)時(shí)周期內(nèi),由外部對(duì)I_O腳做任何下拉動(dòng)作均無法再度使Driver_O輸出振蕩波形,當(dāng)?shù)鹊絋out計(jì)時(shí)完畢之后I_O腳恢復(fù)成為輸入狀態(tài)將會(huì)再次啟動(dòng)。當(dāng)Driver_O送出超聲波驅(qū)動(dòng)信號(hào)完畢之后,換能器由發(fā)射狀態(tài)變?yōu)榻邮諣顟B(tài),收到的信號(hào)先送入PW0268的前置放大器,再通過時(shí)控增益放大器以及帶通濾波器,最后進(jìn)行回波振幅偵測(cè)比較然后輸出。回波信號(hào)在經(jīng)過放大器增益處理之后送入內(nèi)置比較器,當(dāng)輸入振幅超過設(shè)置的閾值后便將輸出轉(zhuǎn)態(tài)至高電平,此時(shí)I_O腳被拉至低電位。
C8051f320檢測(cè)到這個(gè)下降沿即認(rèn)為收到回波信號(hào),從而計(jì)算出距離值。PW0268內(nèi)部原理及外圍電路如圖3所示。
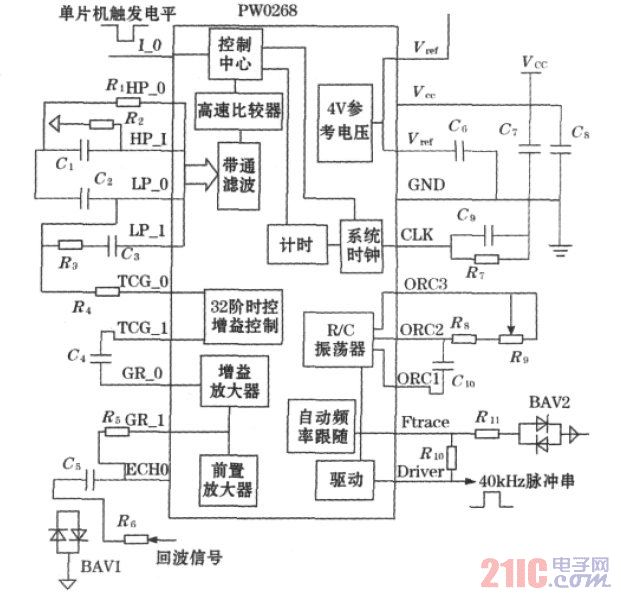
圖3 PW0268 外圍電路
PW0268用于超聲波測(cè)距的最大優(yōu)勢(shì)是其內(nèi)部集成了時(shí)控放大器,其增益是以220/F為步進(jìn)遞增的,其中F是指PW0268的系統(tǒng)時(shí)鐘頻率,它是根據(jù)所要測(cè)量的最大距離計(jì)算得出的。
例如,在20℃標(biāo)準(zhǔn)大氣壓下,要測(cè)量的范圍是5m,則超聲波傳輸時(shí)間:
![]()
此時(shí)PW0268的時(shí)鐘頻率為:
![]()
進(jìn)而可以算出增益步進(jìn)的時(shí)間為:
![]()
因此對(duì)于最大測(cè)量距離為5m的測(cè)距系統(tǒng)而言,PW0268在發(fā)出脈沖串后,時(shí)控放大器的增益會(huì)每過0。92ms步進(jìn)1個(gè)臺(tái)階,進(jìn)而補(bǔ)償超聲波在波程中幅值的衰減。時(shí)控增益步進(jìn)如圖4所示
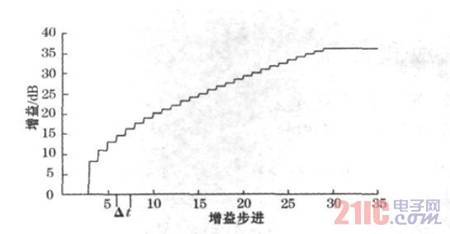
圖4PW0268的時(shí)控增益
4超聲波測(cè)距系統(tǒng)軟件設(shè)計(jì)
系統(tǒng)的軟件由主程序、定時(shí)器計(jì)時(shí)程序、PCA捕捉中斷程序、環(huán)境溫度采集以及串行輸出和LCD顯示組成。
系統(tǒng)工作在連續(xù)實(shí)時(shí)測(cè)距狀態(tài)下,在初始化后,低電平觸發(fā)PW0268發(fā)出超聲波驅(qū)動(dòng)信號(hào),同時(shí)開啟PCA捕捉計(jì)時(shí),系統(tǒng)開始等待接收回波信號(hào),當(dāng)在最大等待時(shí)間內(nèi)接收到回波信號(hào)則停止計(jì)時(shí),根據(jù)環(huán)境溫度修正聲速后,計(jì)算出距離值并輸出顯示,一次完整的測(cè)距過程完成;當(dāng)在最大等待時(shí)間內(nèi)收不到回波信號(hào),則計(jì)時(shí)清零重新觸發(fā)。系統(tǒng)運(yùn)行的流程圖如圖5所示。

圖5系統(tǒng)流程圖
5實(shí)驗(yàn)結(jié)果與分析
為標(biāo)定超聲波測(cè)距系統(tǒng)測(cè)量精度,使用100cm×100cm×2cm硬平木板作障礙物進(jìn)行測(cè)量,并用鋼卷尺測(cè)量實(shí)際距離作為標(biāo)準(zhǔn)值。經(jīng)過試驗(yàn)驗(yàn)證,所設(shè)計(jì)的超聲波測(cè)距系統(tǒng)測(cè)量盲區(qū)約為300mm,在(500~5500)mm范圍內(nèi)對(duì)系統(tǒng)進(jìn)行了3次正反行程的標(biāo)定試驗(yàn),并對(duì)實(shí)驗(yàn)數(shù)據(jù)進(jìn)行了分析和計(jì)算,測(cè)試數(shù)據(jù)如表1所示,擬合直線如圖6所示。由此計(jì)算出超聲波測(cè)距系統(tǒng)靜態(tài)特性指標(biāo),即線性度為:0。11%,重復(fù)性為:0。15%,遲滯為0。10%。
表13次正反行程實(shí)驗(yàn)數(shù)據(jù)表
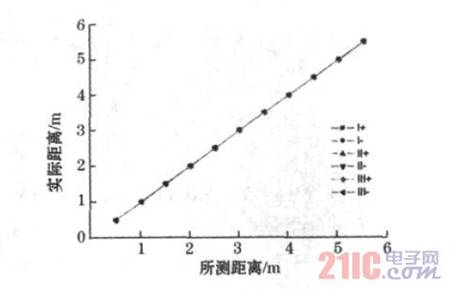
圖6三次正反行程實(shí)驗(yàn)數(shù)據(jù)圖
6結(jié)束語
文中所設(shè)計(jì)的超聲波測(cè)距系統(tǒng)采用反激變換器不僅將發(fā)射超聲波的功率大幅度提高,而且有利于回波信號(hào)的判斷和接收,提高了測(cè)距系統(tǒng)的靈敏度和準(zhǔn)確性。接收超聲波時(shí)使用時(shí)控增益放大器補(bǔ)償了信號(hào)在波程中的幅值衰減,準(zhǔn)確獲得了回波信號(hào),進(jìn)而測(cè)算出了距離值。經(jīng)過實(shí)驗(yàn)測(cè)試,文中所設(shè)計(jì)的測(cè)距系統(tǒng)不僅測(cè)量方法簡(jiǎn)單,電路結(jié)構(gòu)清晰,成本較低,而且測(cè)距性能優(yōu)良,可應(yīng)用于工業(yè)非接觸測(cè)距等場(chǎng)所。