
引 言
多媒體技術(shù)實(shí)用化的關(guān)鍵技術(shù)之一,就是解決視頻、音頻數(shù)字化以后數(shù)據(jù)量大,與數(shù)字存儲(chǔ)媒體、通信網(wǎng)容量小的矛盾,其解決途徑就是壓縮。
為了支持低比特率視頻傳輸業(yè)務(wù),MPEG(Moving Picture Expert5 Group)推出了MPEG-4標(biāo)準(zhǔn)。于1999年正式成為國際標(biāo)準(zhǔn)的MPEG-4是一個(gè)適合于低傳輸率的視頻、音頻解決方案,更注重于多媒體系統(tǒng)的交互性和靈活性。MPEG-4視頻壓縮標(biāo)準(zhǔn)提供了一種高度靈活、基于“內(nèi)容”的編碼方法,解碼端可以“按需解碼”,還可以添加對(duì)象和信息。這種靈活性使得MPEG-4具有高效的編碼效率、基于內(nèi)容的可擴(kuò)展性以及在易受干擾環(huán)境下的魯棒性。
MFEG-4的這些特性使得它十分適合于存儲(chǔ)容量有限的手持終端設(shè)備。但是MPEG-4視頻解碼中涉及的反量化(Inverse Quantlzation,IQ)、反離散余弦變換(InverseDiscrete Cosine Transform,IDCT),運(yùn)動(dòng)補(bǔ)償(Motion Composition,MC)等技術(shù)均是典型的計(jì)算密集型變換,對(duì)于本身處理能力有限,功耗受限的手持終端設(shè)備而言,視頻解碼的實(shí)時(shí)性是一個(gè)很大的挑戰(zhàn)。
本系統(tǒng)在NiosII 和FPGA構(gòu)成的SOPC平臺(tái)上,使用NiosII的用戶自定義指令以硬件邏輯方式實(shí)現(xiàn)MPEG-4解碼中的IQ、IDCT、MC等計(jì)算復(fù)雜、高度耗時(shí)的功能模塊,極大地提高解碼速度。從而在以GPL協(xié)議發(fā)布的XviD Codec基礎(chǔ)上,實(shí)現(xiàn)Simple Profile視覺框架下,L1級(jí)、QCIF(177×144分辨率)、25fps的MPEG-4實(shí)時(shí)解碼,并通過DMA方式在LCD上加以顯示。
1 系統(tǒng)功能描述
本系統(tǒng)從功能上可以分為視頻文件存取、視頻解碼器、YUV-RGB變換器和LCD控制模塊4個(gè)部分。
1.1 視頻文件存取
要進(jìn)行視頻文件的播放,首先需要對(duì)視頻文件進(jìn)行方便地存儲(chǔ)和讀取。系統(tǒng)播放的MP4文件由XviD Codec在PC上對(duì)4:2:0的YUV文件壓縮得到。該MP4文件采用177×144分辨率的QCIF格式,25幀/s。在下載模式,可以通過JTAG接口將MP4文件寫入Flash存儲(chǔ)器中。在播放模式下,Nios II處理器將MP4文件從Flash存儲(chǔ)器中讀出,送入文件緩沖池中等待解碼器對(duì)其進(jìn)行讀取并解碼。
1.2 視頻解碼器
視頻解碼器是系統(tǒng)的核心。如圖1所示,視頻解碼器由熵解碼器、反量化、反離散余弦變換、運(yùn)動(dòng)補(bǔ)償模塊和視頻幀緩存5個(gè)模塊組成。
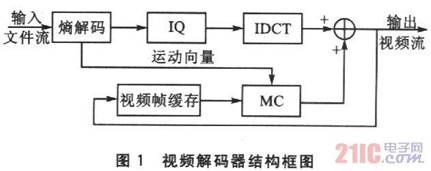
解碼時(shí),首先對(duì)輸入碼流進(jìn)行熵解碼,然后根據(jù)幀的頭信息判斷幀的類型。對(duì)于每個(gè)宏塊,熵解碼后首先經(jīng)過IQ,再經(jīng)過IDCT變換得到空問域的值。對(duì)于參考幀(R_ Frame),由于不需要進(jìn)行運(yùn)動(dòng)補(bǔ)償,變換后的結(jié)果直接輸出,同時(shí)還要將它存儲(chǔ)在視頻幀緩存中.留給后面的預(yù)測幀(P-Frame)做運(yùn)動(dòng)補(bǔ)償。對(duì)于預(yù)測幀,先通過熵解碼得到運(yùn)動(dòng)向量,根據(jù)運(yùn)動(dòng)向量搜索到相應(yīng)的參考幀后,再將IDCT變換后的預(yù)測差值與之相加,合成最后的預(yù)測幀圖像。解碼后的預(yù)測幀同樣是一路輸出,一路存放于視頻幀緩存當(dāng)中。
視頻解碼如果采用純軟件方式實(shí)現(xiàn),運(yùn)算量太大,難以滿足實(shí)時(shí)性要求。利用NiosII的自定義指令,將IQ、IDCT和MC這3個(gè)主要的計(jì)算密集型解碼單元用硬件邏輯方式實(shí)現(xiàn),以硬件邏輯的復(fù)雜性換取解碼的實(shí)時(shí)性。
1.3 YUV-RGB變換器
解碼器解碼得到的YUV格式圖像不適合直接用于LCD顯示。要在LCD上顯示解碼得到的圖象必須將YUV格式的圖像轉(zhuǎn)換為RGB格式,兩者的轉(zhuǎn)換關(guān)系如下:

YUV到RGB格式的轉(zhuǎn)換是一個(gè)很占用CPU資源的過程。本系統(tǒng)以查表的方式,采用硬件邏輯實(shí)現(xiàn)該轉(zhuǎn)換。
1.4 LCD控制模塊
標(biāo)準(zhǔn)VGA LCD顯示模塊(640×480,@60 Hz)是一種逐行掃描設(shè)備。這種掃描是順序的,下一個(gè)掃描點(diǎn)能夠預(yù)知,從而可以將需要送出的像素信息排成一行,看作一個(gè)數(shù)據(jù)流(Streaming)。借助于NiosII的Avalon流模式外設(shè)的設(shè)計(jì)方法,可以實(shí)現(xiàn)一個(gè)Avalon流模式的LCD控制器。利用DMA控制器在流模式的LCD控制器和系統(tǒng)SDRAM之間建立一條DMA傳送通道,由硬件完成像素信息的讀取和送出。NiosII只需要操作SDRAM中的相應(yīng)區(qū)域就可完成顯示圖像的更新。
2 系統(tǒng)設(shè)計(jì)結(jié)構(gòu)
2.1 系統(tǒng)硬件結(jié)構(gòu)
系統(tǒng)硬件結(jié)構(gòu)如圖2所示。

為了達(dá)到25 fps的實(shí)時(shí)解碼速度,IDCT、IQ、MC和YUV-RGB轉(zhuǎn)換這4部分計(jì)算密集型的功能單元全部以用戶自定義指令的方式實(shí)現(xiàn)。
2.1.1 反量化
系數(shù)的二維數(shù)組QF[v][u]被反量化,產(chǎn)生重構(gòu)的DCT系數(shù)。該過程的實(shí)質(zhì)是以量化步長為倍數(shù)的乘法運(yùn)算。
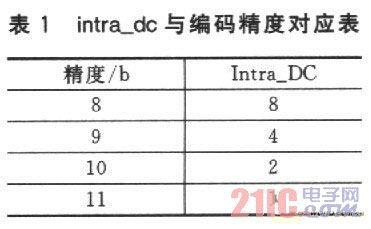
內(nèi)部編碼塊DC系數(shù)的反量化過程不同于其他的AC系數(shù)。DC反量化系數(shù)由一個(gè)常數(shù)因子intra-dc與QF[0][0]相乘而得到。intra_dc與編碼精度有關(guān),表1顯示的即為兩者對(duì)應(yīng)關(guān)系。
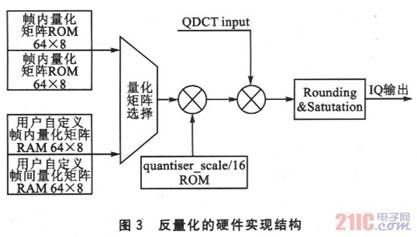
AC系數(shù)的反量化要用到兩個(gè)加權(quán)矩陣,分別用于內(nèi)部子塊和非內(nèi)部子塊。用戶也可以使用自定義的量化矩陣。如果用QDCT表示輸入已量化的AC系數(shù),用DCT表示反量化后的AC系數(shù),那么AC系數(shù)的IQ變換公式如下:
式中,quantiser_scale為0~112之間的兩組數(shù)值,分別對(duì)應(yīng)不同的比特流控制狀態(tài)。但是在本系統(tǒng)采用的XviDCodec版本中,比特流控制功能并沒有得到實(shí)現(xiàn),所以這里quantiser_scale的取值固定。
反量化得到的結(jié)果通過飽和化,使其限制在[-2048,+2047]之間。
IQ在FPGA上按照?qǐng)D3的框圖進(jìn)行硬件實(shí)現(xiàn)。
2.1.2 反離散余弦變換
IDCT是DCT的逆過程,用于還原DCT系數(shù)矩陣。
IDCT過程可由下面的公式描述:
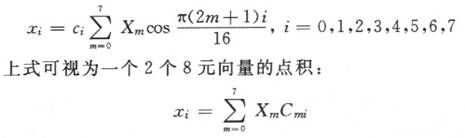
將8元的輸入向量[X0,X1,X2,X3,X4,X5,X6,X7]分成奇元素[X1,X3,X5,X7]和偶元素[Xo,X2,X4,X6],8×8矩陣則用2個(gè)4×4矩陣來代替,奇元素和偶元素分別與這2個(gè)矩陣v和u相乘,生成2個(gè)4×4向量p和q,通過加減向量p和q,可得到輸出向量x。
算法可以表示成下面的公式:

基于8×8矩陣的IDCT算法,在FPGA上按照?qǐng)D4所示的結(jié)構(gòu)加以硬件實(shí)現(xiàn)。

2.1.3 運(yùn)動(dòng)補(bǔ)償
運(yùn)動(dòng)補(bǔ)償是一種大量、單調(diào)的運(yùn)算。為了能實(shí)現(xiàn)運(yùn)動(dòng)補(bǔ)償,采用了多級(jí)、多個(gè)運(yùn)算單元并行流水運(yùn)算的方式,如圖5所示。
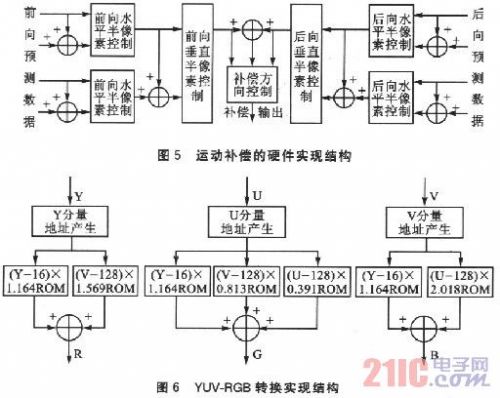
運(yùn)動(dòng)補(bǔ)償模塊的控制很復(fù)雜。實(shí)際設(shè)計(jì)時(shí)將它分成幾個(gè)子模塊:補(bǔ)償控制、補(bǔ)償?shù)刂樊a(chǎn)生、差分?jǐn)?shù)據(jù)提供以及補(bǔ)償運(yùn)算。這幾個(gè)子模塊直接采用硬件邏輯設(shè)計(jì),運(yùn)行時(shí)無需NiosII處理器干預(yù)。其中補(bǔ)償控制是完成整個(gè)運(yùn)動(dòng)補(bǔ)償?shù)目刂疲峁┹斎肟刂菩盘?hào)、輸出控制信號(hào)、緩存控制信號(hào)、預(yù)測數(shù)據(jù)和差分?jǐn)?shù)據(jù)等;補(bǔ)償?shù)刂樊a(chǎn)生用于生成預(yù)測數(shù)據(jù)在幀緩存中的地址及補(bǔ)償結(jié)果的寫地址;差分?jǐn)?shù)據(jù)負(fù)責(zé)接收IDCT的結(jié)果,通過緩存在適當(dāng)時(shí)機(jī)提供補(bǔ)償使用;補(bǔ)償運(yùn)算則完成最終預(yù)測數(shù)據(jù)的計(jì)算。
2.1.4 YUV-RGB轉(zhuǎn)換
根據(jù)YUV到RGB色彩空間的轉(zhuǎn)換關(guān)系,對(duì)每個(gè)乘積項(xiàng)都預(yù)先做出結(jié)果,存放在ROM當(dāng)中。對(duì)每一個(gè)YUV分量的輸入,由硬件邏輯產(chǎn)生存取地址,并進(jìn)行加法運(yùn)算,從而得到對(duì)應(yīng)的結(jié)果。其實(shí)現(xiàn)結(jié)構(gòu)如圖6所示。
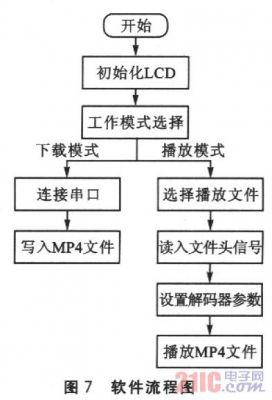
2.2 系統(tǒng)軟件工作流程
本系統(tǒng)的軟件工作流程如圖7所示。
結(jié) 語
該系統(tǒng)采用基于Altera FPGA嵌入式NiosII軟核的SOPC平臺(tái)實(shí)現(xiàn),具有較低的硬件成本,IP核的大量使用,良好的系統(tǒng)擴(kuò)展性的特點(diǎn)。