
引言
巷道的安全支護(hù)在煤礦安全生產(chǎn)中起到重要的作用,也是煤礦安全生產(chǎn)中的難點。對巷道的安全支護(hù)的關(guān)鍵是要實時地掌握嗣巖松動圈的破碎狀態(tài)。
巷道開挖后破壞了原巖的應(yīng)力平衡狀態(tài),從而導(dǎo)致:第一,巷道周邊徑向應(yīng)力下降為零,圍巖強(qiáng)度明顯下降;第二,圍巖中出現(xiàn)應(yīng)力集中現(xiàn)象。當(dāng)這種應(yīng)力超過圍巖強(qiáng)度之后,在巷道周邊圍巖所形成的破碎帶便是圍巖松動圈。其物理狀態(tài)表現(xiàn)為破裂縫的增加及巖體應(yīng)力水平的降低。松動圈測試就是測試開巷后新的破壞裂縫及其分布范圍,圍巖中有新破裂縫與沒有破裂縫的界面位置就是松動圈的邊界。參考文獻(xiàn)介紹了基于松動圈測試的檢測原理相應(yīng)的測試方法,包括超聲波探測法、多點位移計量測法和地質(zhì)雷達(dá)探測法。參考文獻(xiàn)中根據(jù)震波在不同狀態(tài)的巖層中傳播速度的不同這一原理提出了基于震波的圍巖松動圈測試方法。
鑒于超聲波測試的簡單、易于操作和無損傷等特點,本文提出了一種基于超聲波的圍巖裂隙監(jiān)測系統(tǒng)。此系統(tǒng)結(jié)合成熟的干孔測試方法,可以方便實時地檢測到圍巖松動圈的信息,為巷道的安全支護(hù)及時提供信息,確保礦藏生產(chǎn)的安全。
1 超聲波檢測圍巖松動圈原理
1.1 超聲波在圍巖中的形態(tài)
當(dāng)超聲波以垂直方向入射巖體時,會同時產(chǎn)生縱波、橫波、表面波。根據(jù)聲學(xué)理論,在無限介質(zhì)中,這三種波的聲速分別是:

式中,Vl、Vs、Vr分別為縱波、橫波、表面波的聲速,E為楊氏模量,ρ為密度,μ為泊松比。通常,在固體中,Vs約為V1的1/2,Vr約為Vs的0.9倍。但是因沿巖體表面方向傳播的縱波、橫波能量很小,而表面波的能量卻高度集中(表面波的能量幾乎全部集中到物體表層一個波長的深度內(nèi)),故到達(dá)近距離內(nèi)接收換能器的表面波幅度遠(yuǎn)遠(yuǎn)大于縱波和橫波。本文中,將通過采集超聲波在巖石中傳播的表面波信息來分析圍巖狀態(tài)。
此外,超聲波的傳播速度還與巖體結(jié)構(gòu)構(gòu)造和應(yīng)力狀態(tài)有關(guān),聲波波速隨介質(zhì)裂隙發(fā)育、密度降低、聲阻抗增大而降低,隨應(yīng)力增大、密度增大而增加。巷道開挖后,圍巖應(yīng)力將重新分布處于3個應(yīng)力區(qū):應(yīng)力集中區(qū)、原巖應(yīng)力區(qū)和應(yīng)力降低區(qū)。這三個區(qū)的特點:應(yīng)力降低區(qū)(圍巖松動圈區(qū))裂隙較多,應(yīng)力下降,聲速低于正常波速;應(yīng)力集中區(qū)應(yīng)力較高,裂隙壓實,聲速高于正常波速;原巖應(yīng)力區(qū)應(yīng)力接近原始應(yīng)力狀態(tài),波速接近正常波速。本文利用超聲波在巷道圍巖一定深度范圍內(nèi)的傳播速度的變化來判定圍巖的松動范圍。
1.2 超聲波波速測試方案
根據(jù)超聲波發(fā)送/接收換能器的個數(shù)來劃分,目前常用的測速方案主要有單發(fā)單收和單發(fā)雙收方式,如圖1所示。這些發(fā)送/接收換能器都會按照固定的距離放入預(yù)先鉆好的圍巖孔洞。單發(fā)單收方案是通過計算從發(fā)送端到接收端之間的時間,再根據(jù)兩端之間的距離來確定測試位置處超聲波在圍巖中的傳播速度。單發(fā)雙收方案是利用發(fā)送端首波經(jīng)過兩個接收端的時間差和兩個接收端之間的距離來確定超聲波的傳播速度。
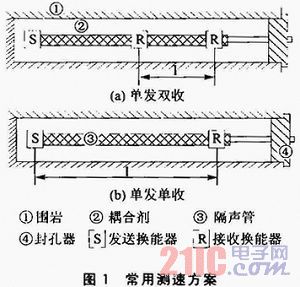
超聲波的傳播速度為:

![]()
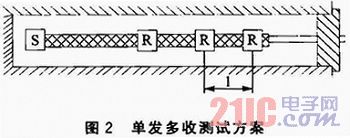
單發(fā)單收和單發(fā)雙收均需要不斷地改變測試深度才能完成測試。本文結(jié)合單發(fā)單收和單發(fā)雙收方法,利用式(4)提出了一種單發(fā)多收的測試方案,如圖2所示。此結(jié)構(gòu)不需要多次移動測試器,甚至可以固定到巖層中實現(xiàn)實時的監(jiān)測。
2 圍巖松動圈監(jiān)測系統(tǒng)硬件設(shè)計
圍巖松動圈監(jiān)測系統(tǒng)硬件結(jié)構(gòu)框圖如圖3所示。

主控芯片產(chǎn)生40 kHz的矩形波,高壓電路將其放大,經(jīng)過超聲波發(fā)送換能器與其產(chǎn)生共振發(fā)出最大功率的超聲波。在主控芯片STM32F103產(chǎn)生40 kHz的矩形波的同時,定時器開始計數(shù)。當(dāng)超聲波換能器接收到超聲波的首波之后,濾波電路判斷并濾除非40 kHz的超聲波,經(jīng)放大電路將其放大,信號整形電路對40 kHz的高低電平進(jìn)行轉(zhuǎn)換后發(fā)送給主控芯片。主控芯片依此來記錄超聲波經(jīng)過每一個接收傳感器的時刻,并根據(jù)傳播時間計算出每一段巖層中超聲波的速度,然后將這些信息通過GPRS模塊上傳給后方監(jiān)控室。
2.1 主控單元與存儲模塊
本系統(tǒng)采用的主控芯片為ST公司推出的基于ARMCortex-M3內(nèi)核的32位微控制器STM32F103。該控制器是為低功耗和價格敏感的應(yīng)用而專門設(shè)計的,具有突出的能效比和處理速度。本設(shè)計中嵌入了μC/OS-II操作系統(tǒng),可以便于多任務(wù)控制。此外,STM32微控制器支持NAND Flash存儲器擴(kuò)展,能夠?qū)⒉杉臄?shù)據(jù)存到Flash里面,存儲與提取數(shù)據(jù)更加快速。
2.2 超聲波發(fā)射與接收電路
2.2.1 超聲波發(fā)射電路
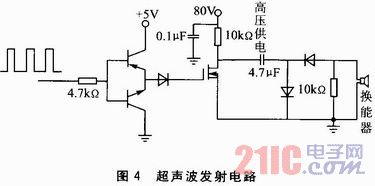
超聲波發(fā)射電路由超聲波產(chǎn)生電路、放大電路以及超聲波換能器組成,如圖4所示。由STM32F103的PWM模塊產(chǎn)生40kHz的矩形波,經(jīng)放大電路放大送入超聲波發(fā)送換能器,發(fā)送出40 kHz的超聲波。
2.2.2 超聲波接收電路
超聲波接收電路包括放大信號電路、帶通濾波電路以及整剝型發(fā)電路,如圖5所示。超聲波探頭接收超聲波,經(jīng)過LM358對其兩級放大,然后將放大的信號送入LM567將波形濾波并且觸發(fā)CPU的引腳。LM567具有帶通濾波和觸發(fā)的作用,5、6腳外接的電阻和電容決定了內(nèi)部壓控振蕩器的中心頻率f,f≈1/1.1RC。當(dāng)LM567的3引腳輸入幅度大于等于25 mV,并且頻率在帶寬內(nèi)的信號時,8引腳由高電平變?yōu)榈碗娖剑|發(fā)CPU的引腳,完成接收超聲波的功能。

2.3 GPRS模塊
GPRS無線傳輸模塊采用華為公司的GSM900-C模組,如圖6所示。GSM通過串口接收CPU的數(shù)據(jù),并實時地發(fā)送給后方監(jiān)控室,通過發(fā)送引腳將后方監(jiān)控室的命令傳送給CPU,從而實現(xiàn)了后方監(jiān)控室可以主控請求目標(biāo)板之間人機(jī)互動的功能。目標(biāo)板也可以自動定時采集數(shù)據(jù),并通過GSM模塊傳輸?shù)胶蠓奖O(jiān)控室。

3 圍巖松動圈監(jiān)測系統(tǒng)軟件設(shè)計
基于超聲波的圍巖松動圈監(jiān)測系統(tǒng)的軟件設(shè)計流程如圖7所示。本設(shè)計中嵌入了μC/OS-II操作系統(tǒng),主要包括4個線程:

①線程1是定時采集圍巖裂隙的數(shù)據(jù)。由后方監(jiān)控室發(fā)送采集時間表,例如如果是間隔10 min采集一次數(shù)據(jù),則目標(biāo)板就會每隔10 min對數(shù)據(jù)進(jìn)行采集,采集完畢將數(shù)據(jù)傳送到后方服務(wù)器。
②線程2是目標(biāo)板實時監(jiān)測服務(wù)器發(fā)送來的指令并保存到緩沖池。
③線程3是目標(biāo)板處理緩沖池的數(shù)據(jù),如果檢測到緩沖池有更新,說明后方服務(wù)器有新任務(wù)下達(dá),則根據(jù)任務(wù)去做相應(yīng)處理。
④線程4是計數(shù)線程,準(zhǔn)確計算出從超聲波發(fā)送出去到接收到超聲波所用到的時間。
結(jié)語
本文設(shè)計的圍巖松動圈監(jiān)測系統(tǒng)可以實時地監(jiān)測到圍巖的松動圈的變化信息,這為巷道的安全支護(hù)及時提供正確參考信息。此外,本文提出的方案可以使測試人員遠(yuǎn)離礦井進(jìn)行測試,有助于礦井的安全生產(chǎn);由于加入了多任務(wù)處理,也能實時地處理多任務(wù),有助于以后的擴(kuò)展。