
引言
煤礦井下環(huán)境復(fù)雜,作業(yè)點多且面廣,造成井下作業(yè)人員分布復(fù)雜,管理不便,因此實時動態(tài)掌握井下人員的分布情況,實現(xiàn)人員精確定位顯得十分重要。特別是在井下發(fā)生事故時,能及時知道井下人員的信息及確切位置,制定出切實有效的救援方案則更為重要。
目前我國大中型煤礦井下雖然已大量裝備了以RFID(Radio Frequency Identifi- cation)技術(shù)為主的人員定位系統(tǒng)。但該系統(tǒng)目前仍無法很好地解決高精度定位和快速大量人員流下井的漏檢等問題。本文在研究了國內(nèi)外相似系統(tǒng)的基礎(chǔ)上,針對井下特殊的環(huán)境設(shè)計了基于GPEON和ZigBee技術(shù)的無線定位系統(tǒng)。該系統(tǒng)具有雙向通信、可靠性高、低功耗、低成本、網(wǎng)絡(luò)容量大、響應(yīng)速度快、抗干擾性強、定位范圍廣且精確、漏檢率和誤碼率低等特點。可用來進(jìn)行日常的人員考勤和位置查詢以及緊急情況和事故狀況下的人員定位,有效的提高煤礦生產(chǎn)的安全性及應(yīng)急救援的工作效率,具有一定的先進(jìn)性和實用性。
系統(tǒng)簡介
系統(tǒng)工作原理
按照位置的不同將系統(tǒng)分為井上和井下兩部分,如圖1所示。
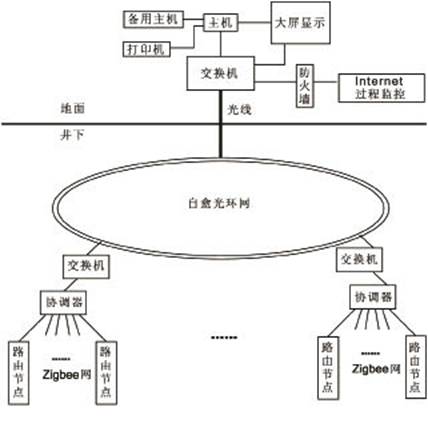
圖 1 系統(tǒng)總體結(jié)構(gòu)
井下的協(xié)調(diào)器和路由器安裝在指定位置組成Zigbee無線網(wǎng)絡(luò),當(dāng)攜帶移動終端節(jié)點的人員進(jìn)入網(wǎng)絡(luò)覆蓋范圍時,終端節(jié)點會自動從與其相連的協(xié)調(diào)器獲得定位所需要的RSSI值和坐標(biāo)值,然后計算出自己的位置,再將自身存儲的信息及獲得的位置通信息過路由節(jié)點、協(xié)調(diào)器、交換機、光網(wǎng)絡(luò)傳至地面,信息經(jīng)處理后儲存并顯示。地面控制中心也可以通過上位機發(fā)送指定信息,對特定人員進(jìn)行呼叫或者緊急情況下進(jìn)行群呼。
全光網(wǎng)絡(luò)簡介
光纖傳輸具有抗電磁干擾性強、頻帶寬、衰減小、傳輸速率高、頻率特性好等優(yōu)點,對于煤礦井下復(fù)雜的通信環(huán)境來說,采用光纖傳輸可以提高系統(tǒng)的數(shù)據(jù)傳輸質(zhì)量和可靠性,具有明顯的優(yōu)勢。因此本系統(tǒng)采用了基于千兆以太全光網(wǎng)絡(luò)GEPON(Gigabit Ethernet Positive Optical Network)的無源光纖傳輸方式,通信標(biāo)準(zhǔn)采用以太網(wǎng)TCP/IP 技術(shù),其它類型的通信格式均可通過協(xié)議網(wǎng)關(guān)轉(zhuǎn)換為以太網(wǎng)信息包在全光網(wǎng)絡(luò)上進(jìn)行傳送,使網(wǎng)絡(luò)具備很好的兼容性和可擴(kuò)充性。同時系統(tǒng)采用雙環(huán)自愈光纖網(wǎng)絡(luò),形成一種具有雙總線、環(huán)形兩種冗余方式的系統(tǒng),而且網(wǎng)絡(luò)出現(xiàn)問題時能自行重構(gòu)。另外系統(tǒng)采用光無源分支技術(shù),網(wǎng)絡(luò)節(jié)點中單一的ONU故障不影響整個系統(tǒng)的正常運行,使系統(tǒng)運行更加穩(wěn)定可靠。
硬件電路部分簡介
協(xié)調(diào)器部分:協(xié)調(diào)器作為無線網(wǎng)絡(luò)數(shù)據(jù)的匯聚點,負(fù)責(zé)無線網(wǎng)絡(luò)的發(fā)起、管理維護(hù)以及數(shù)據(jù)處理,通過對Zigbee協(xié)議和嵌入式驅(qū)動程序的編寫,使得ARM和Zigbee技術(shù)良好結(jié)合,本系統(tǒng)采用基于ARM920T核的S3C2440A作為中央控制器,使用Linux操作系統(tǒng),能很好的實現(xiàn)協(xié)調(diào)器功能。
路由節(jié)點部分:路由節(jié)點以TI公司的CC2431芯片作為無線收發(fā)模塊的核心,它在單個芯片上整合了Zigbee射頻(RF)前端、內(nèi)存和微控制器,和其他外圍電路一起實現(xiàn)路由功能。每個節(jié)點組網(wǎng)后都有唯一的ID,通信信道接入方式采用CSMA-CA技術(shù),有效的減少幀的沖突,物理層采用直接序列擴(kuò)頻(DSSS)和頻率捷變FA技術(shù),提高了抗干擾和抗多徑的能力。
移動終端節(jié)點:采用精簡設(shè)備CC2430模塊為核心,具有收發(fā)及處理信息的能力,在移動終端節(jié)點上可以連接其它傳感器,組成具有感知能力的無線傳感器網(wǎng)絡(luò)
定位算法
根據(jù)定位過程中是否需要測量節(jié)點間的距離,可將定位算法分為基于距離(Range-based)和距離無關(guān)(Range-free)的兩類算法,前者主要有RSSI、TOA、TDOA和AOA等,定位時需要測量出節(jié)點間的距離或角度;后者主要有DV-Hop法、質(zhì)心法、APIT法和LMAP法等,它們利用網(wǎng)絡(luò)連通性等間接信息計算節(jié)點的位置,這些算法都有各自的優(yōu)點和缺點,本文提出基于RSSI和改進(jìn)型質(zhì)心法相結(jié)合的定位算法。
RSSI(基于接收信號強度指示)
RSSI定位是基于距離定位機制的一種,它依據(jù)已知發(fā)射信號和接收信號的強度計算出信號在傳播中的損耗,然后利用經(jīng)驗?zāi)P蛯鬏敁p耗轉(zhuǎn)換為距離,再根據(jù)已有的算法計算出節(jié)點的位置。在井下巷道內(nèi)利用2個節(jié)點進(jìn)行信號衰減特性與距離關(guān)系的測試,經(jīng)過對大量測試數(shù)據(jù)取平均值,可以求的RSSI信號衰減的簡化數(shù)學(xué)統(tǒng)計模型如式1:
![]()
式1
其中P(d)是在距離為d處的信號強度值,P(d0) 是參考距離為d0處的信號強度,![]() 為傳輸中的損耗因子,一般在2到4之間,圖2是多次測量后進(jìn)行最小二乘法擬合的曲線,由圖2可知,隨著距離的增加接收信號強度也衰減,距離小時信號衰減的速度快,距離大時,信號衰減變得平緩。
為傳輸中的損耗因子,一般在2到4之間,圖2是多次測量后進(jìn)行最小二乘法擬合的曲線,由圖2可知,隨著距離的增加接收信號強度也衰減,距離小時信號衰減的速度快,距離大時,信號衰減變得平緩。
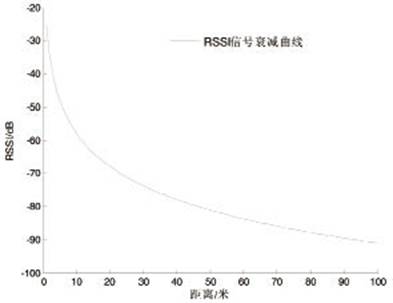
圖2 RSSI信號衰減曲線
加權(quán)質(zhì)心法
在質(zhì)心法中,把與未知節(jié)點相連的所有已知節(jié)點組成的多邊形的幾何質(zhì)心作為未知節(jié)點估計的位置,即:
![]()
(2)
其中(x1,y1),(x1,y1)…(xn,yn)是與未知節(jié)點相連接的已知節(jié)點的坐標(biāo)。此方法的定位誤差為![]() 。加權(quán)質(zhì)心法是在質(zhì)心法的基礎(chǔ)上,通過加權(quán)因子來決定各個已知節(jié)點對質(zhì)心位置影響的大小,每個已知節(jié)點的加權(quán)因子的大小,可以由它與未知節(jié)點間的接收信號強度指示值(RSSI)來確定。對于N個已知節(jié)點(x1,y1),(x1,y1)…(xn,yn),把它們和未知節(jié)點的RSSI值轉(zhuǎn)換成相應(yīng)的距離d1,d2,…,dn,首先只考慮兩個已知節(jié)點(x1,y1),(x1,y1),顯然(x-x1)/d1=(x-x2)/d2 和(y-y1)/d1 =(y-y2)/d2 ,可以求得:
。加權(quán)質(zhì)心法是在質(zhì)心法的基礎(chǔ)上,通過加權(quán)因子來決定各個已知節(jié)點對質(zhì)心位置影響的大小,每個已知節(jié)點的加權(quán)因子的大小,可以由它與未知節(jié)點間的接收信號強度指示值(RSSI)來確定。對于N個已知節(jié)點(x1,y1),(x1,y1)…(xn,yn),把它們和未知節(jié)點的RSSI值轉(zhuǎn)換成相應(yīng)的距離d1,d2,…,dn,首先只考慮兩個已知節(jié)點(x1,y1),(x1,y1),顯然(x-x1)/d1=(x-x2)/d2 和(y-y1)/d1 =(y-y2)/d2 ,可以求得:
![]()
(3)
取1/dn為加權(quán)因子的值,距離未知節(jié)點近的權(quán)值大,距離遠(yuǎn)的權(quán)值小,這種約束力符合加權(quán)質(zhì)心算法的要求,故加權(quán)質(zhì)心法的最終計算公式為:
![]()
![]()
(4)
定位誤差測試
仿真測試
利用Matlab仿真工具模擬基于RSSI和加權(quán)質(zhì)心算法的定位性能。假設(shè)在100m×100m的正方形區(qū)域內(nèi),較均勻的分布36個已知節(jié)點和隨機分布50個未知節(jié)點,對定位誤差進(jìn)行仿真,結(jié)果如圖3、4所示。由圖可知,基于RSSI和加權(quán)質(zhì)心算法的定位性能好,50個未知節(jié)點的定位誤差在已知節(jié)點分布足夠密集的情況下均小于0.5m,滿足了高精度定位的要求。

圖 3 RSSI&加權(quán)質(zhì)心仿真誤差
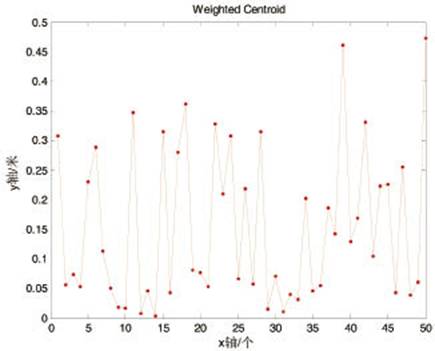
圖 4 RSSI&加權(quán)質(zhì)心仿真誤差
實際測試
由于井下實際操作條件還不成熟,本設(shè)計只在教學(xué)樓走廊內(nèi)模擬井下環(huán)境進(jìn)行測試,在走道中安裝10個路由節(jié)點,間隔約10米,隨機選取9個點進(jìn)行測試,測試結(jié)果發(fā)送到上位機軟件,每個點測10次取平均值,結(jié)果如表1:
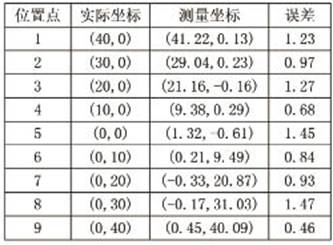
由實驗結(jié)果可知:多次定位誤差均小于1.5米。并且當(dāng)移動終端節(jié)點時,在上位機上可以實時顯示節(jié)點的運動軌跡,同時上位機對某節(jié)點發(fā)送查詢控制指令時,節(jié)點可以快速響應(yīng)并返回結(jié)果。該實驗顯示出系統(tǒng)穩(wěn)定性強、準(zhǔn)確性高、反應(yīng)速度快。對于節(jié)點數(shù)較多以及復(fù)雜的井下環(huán)境等情況,有待于進(jìn)一步的實驗驗證。
結(jié)束語
基于GEPON和Zigbee技術(shù)的礦井內(nèi)人員無線定位系統(tǒng)的設(shè)計,利用了嵌入式Linux的快速穩(wěn)定性、GEPON網(wǎng)絡(luò)的高可靠性以及Zigbee無線網(wǎng)絡(luò)的低功耗和定位精確的特點,實現(xiàn)了地面控制中心對井下人員的精確定位,不僅可以在井下發(fā)生事故時起到重要作用,而且可用于日常的考勤管理,另外還可以提供較多的實用功能,例如:可在移動節(jié)點處加入瓦斯傳感器、一氧化碳傳感器、濕度傳感器、溫度傳感器等,實現(xiàn)Zigbee網(wǎng)絡(luò)井下更多的監(jiān)控功能,組成井下無線感知網(wǎng)絡(luò)。此系統(tǒng)比較適合煤礦企業(yè)的需求,具有較好的市場前景,對于進(jìn)一步提高和發(fā)展井下人員安全定位管理系統(tǒng)技術(shù)的應(yīng)用具有一定借鑒意義。