
紅外線遙控是目前使用最廣泛的一種通信和遙控手段。工業(yè)設(shè)備中,在高壓、輻射、有毒氣體、粉塵等環(huán)境下,采用紅外線遙控不僅完全可靠而且能有效地隔離電氣干擾。
1.紅外遙控系統(tǒng)
通用紅外遙控系統(tǒng)由發(fā)射和接收兩大部分組成,使用編/解碼專用集成電路芯片來(lái)進(jìn)行控制操作。發(fā)射部分包括鍵盤(pán)矩陣、編碼調(diào)制、LED紅外發(fā)射器;接收部分包括光、電轉(zhuǎn)換放大器、解調(diào)、解碼部分電路。
2.遙控發(fā)射器及其編碼
下面以日本NEC的uPD6121G組成發(fā)射電路為例說(shuō)明編碼原理。當(dāng)發(fā)射器按鍵按下后,有遙控碼發(fā)出,所按的鍵不同遙控編碼也不同。這種遙控碼具有以下特征:
采用脈寬調(diào)制的串行碼,以脈寬為0.565ms、間隔0.56ms、周期為1.125ms的組合表示二進(jìn)制的“0”;以脈寬為0.565ms、間隔1.685ms、周期為2.25ms的組合表示二進(jìn)制的“1”,其”0”、“1”定義波形如圖2所示。
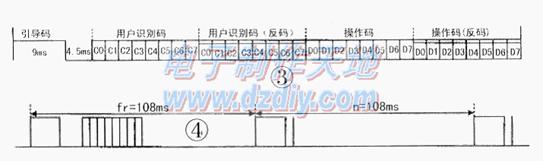
上述“0”和“1”組成的32位二進(jìn)制碼經(jīng)38kt_{z的載頻進(jìn)行二次調(diào)制以提高發(fā)射效率,達(dá)到降低電源功耗的目的。然后再通過(guò)紅外發(fā)射二極管產(chǎn)生紅外線向空間發(fā)射,如圖3所示為最終發(fā)射出去的紅外信號(hào)波形。
uPD6121G產(chǎn)生的遙控編碼是連續(xù)的32位二進(jìn)制碼組,其中前16位為用戶識(shí)別碼,能區(qū)別不同的電器設(shè)備,防止不同機(jī)種遙控碼互相干擾。該芯片的用戶識(shí)別碼固定為十六進(jìn)制0仆1.;后16位為8位操作碼(功能碼)及其反碼。UPD6121G最多額128種不同組合的編碼。遙控器在按鍵按下后,周期性地發(fā)出同一種32位二進(jìn)制碼,周期約為108ms。一組碼本身的持續(xù)時(shí)間隨它包含的二進(jìn)制“0”和“1”的個(gè)數(shù)不同而不同,大約在45~63ms之間,圖4為發(fā)射波形圖。
當(dāng)一個(gè)鍵按下超過(guò)36ms,振蕩器使芯片激活,將發(fā)射一組108ms的編碼脈沖,這108ms發(fā)射代碼由一個(gè)起始碼(9ms),一個(gè)結(jié)果碼(4.5ms),低8位地址碼(9ms~18ms),高8位地址碼(9ms~18ms)。8位數(shù)據(jù)碼(9ms~18ms)和這8位數(shù)據(jù)的反碼(9ms~18ms)組成。如果鍵按下超過(guò)108ms仍未松開(kāi),接下來(lái)發(fā)射的代碼(連發(fā)代碼)將僅由起始碼(9ms)和結(jié)束碼(2.5ms)組成。
3.接收頭及解碼
一體化紅外線接收頭是一種集紅外線接收和放大于一體,不需要任何外接元件,就能完成從紅外線接收到輸出與TTL電平信號(hào)兼容的所有工作,而體積較小,很多家電中都采用此類紅外接收頭,它適合于各種紅外線遙控和紅外線數(shù)據(jù)傳輸,如圖1左下角所示為增強(qiáng)型51實(shí)驗(yàn)板上的一體化紅外線接收頭。
下面我們就來(lái)一起看一下增強(qiáng)型51實(shí)驗(yàn)板是如何來(lái)解uPD6121紅外線編碼及如何使用紅外線來(lái)進(jìn)行各式各樣的控制。
學(xué)習(xí)了紅外發(fā)射原理后,可以想到解碼的關(guān)鍵是如何識(shí)別“0”和“1”,從位的定義我們可以發(fā)現(xiàn)”0”、“1”均以0.56ms的低電平開(kāi)始,不同的是高電平的寬度不同,“0”為0.56ms,“1”為1.68ms,所以必須根據(jù)高電平的寬度區(qū)別“0”和“1”。如果從0.56ms低電平過(guò)后,開(kāi)始延時(shí),0.56ms以后,若讀到的電平為低,說(shuō)明該位為”0”,反之則為“1”,為了可靠起見(jiàn),延時(shí)必須比0.56ms長(zhǎng)些,但又不能超過(guò)1.12ms,否則如果該位為”0”,讀到的已是下一位的高電平,因此取(1.12ms+0.56ms)/2=0.84ms最為可靠,一般取0.84ms左右均可。同時(shí),我們還應(yīng)注意的是,根據(jù)碼的格式,應(yīng)該等待9ms的起始碼和4.5ms的結(jié)果碼完成后才能讀碼。
學(xué)習(xí)板上的一體化紅外接收頭一共有3個(gè)腳,分別是“地”、“電源”、“數(shù)據(jù)”,其“數(shù)據(jù)”腳與51單片機(jī)的“INTO”腳,整個(gè)過(guò)程可以分成兩步,第一步是讀取并判斷引導(dǎo)碼是否正確,如果不是則直接返回并初始化檢測(cè)參數(shù);第二步是連續(xù)4次,按照每次8bit讀取4個(gè)字節(jié)的后續(xù)數(shù)據(jù),其中,檢測(cè)過(guò)程里對(duì)”0”和“1”的判斷必須是在開(kāi)啟計(jì)時(shí)之后,以減少因?yàn)槌绦驁?zhí)行而導(dǎo)致的測(cè)量時(shí)間長(zhǎng)度上誤差。
解碼過(guò)程關(guān)鍵是使用單片機(jī)的定時(shí)器,我們可以用引導(dǎo)碼的下降沿來(lái)觸發(fā)單片機(jī)的定時(shí)器開(kāi)始計(jì)時(shí)處理,這樣就可以獲得電平的時(shí)間長(zhǎng)度了,一般的遙控器編碼在長(zhǎng)按按鍵的時(shí)候,會(huì)連續(xù)發(fā)數(shù)據(jù),可能是同樣的數(shù)據(jù),也有可能是個(gè)特定的所謂的重復(fù)幀,但大致上15ms之內(nèi)沒(méi)有信號(hào)收到就表示當(dāng)前的數(shù)據(jù)幀已經(jīng)接收完畢。
解碼部分程序代碼如下:
unsignedcharuPD6121_read_code_8(void){unsignedchartemp=0;unsignedchari;for(i=0;<8;i++){temp=temp》1:
while(ir_receive==0);//等待高電平測(cè)試結(jié)束TR1=0;//高電平測(cè)試結(jié)束,停止計(jì)時(shí)high_level_time=TH1*256+TL1;//保存高電平的數(shù)據(jù)TH1=0;TL1=0;TR1=1;//啟動(dòng)對(duì)低電平的測(cè)試while(ir_receive==1){if(TH1>0x4e){decode_error=1;return0;}//超時(shí)出錯(cuò),返回}
TR1=0;//低電平測(cè)試結(jié)束Iow_level_time=TH1*256+TL1;//保存低電平的數(shù)據(jù)TH1=0;TL1=0;TR1=1;//如果電平長(zhǎng)度不在合理的范圍內(nèi),則認(rèn)為出錯(cuò)if((high_level_time<400)II(high_level_time>700)II(Iow_level_time<400)II(Iow_level—time>1900)){decode_error=1;returnO;}
if((Iow_level_time>400)&&(Iow_level_time<700))temp=temp&0x7f;if((Iow_level_time>1400)&&(Iow_level_time<1900))temp=temp1ox80;} returntemp;}nsignedcharuPD6121_decode(void)//解碼出錯(cuò)返回1,對(duì)則返回OTR1=1://開(kāi)始測(cè)量引導(dǎo)碼(或重復(fù)碼)的高電平寬度while(ir_receive==0);//等待電平變高,不需要超時(shí)監(jiān)測(cè)TR1=0;//高電平(對(duì)發(fā)射電路而言)測(cè)試結(jié)束high_level_time=TH1*256+TL1://保存高電平的數(shù)據(jù)//————————————————————TH1=0;TL1=0;TR1=1;//啟動(dòng)對(duì)低電平的測(cè)試while(ir_receive==1)//在對(duì)高電平進(jìn)行查詢時(shí),計(jì)超時(shí)。大于20ms出錯(cuò){if(TH1>0x4e)return1://測(cè)試超時(shí)后直接初始化相關(guān)變量,開(kāi)始下次測(cè)試}
TR1=0://低電平(對(duì)發(fā)射電路而言)測(cè)試結(jié)束Iow_level_time=TH1*256+TL1:
//保存低電平的數(shù)據(jù)TH1=0;TL1=0;TR1=1;//為增加計(jì)時(shí)的準(zhǔn)確性,數(shù)據(jù)的處理都是在計(jì)時(shí)過(guò)程里//判斷引導(dǎo)碼(或重復(fù)碼)是否正確,如果不正確,則設(shè)置出錯(cuò)標(biāo)志位,并退出中斷程序if((high_level_time<8500)II(high_level_time>9500)II(Iow_level_time<1000)II(Iow_level_time>5000)){return1://因是引導(dǎo)碼出錯(cuò),所以直接初始化后重新開(kāi)始測(cè)試}
//——————————————————//對(duì)是引導(dǎo)碼還是重復(fù)碼進(jìn)行判斷。如果是重復(fù)碼,就跳過(guò)后面數(shù)據(jù)的讀取if((Iow_level—time>1000)&&(Iow_level_time<3500))repeat_code_detected=1:
if((Iow_level_time>4000)&&(Iow_level_time<5000))Ioad_code_detected=1;if(repeat_code_detected==1)return1;//直接結(jié)束,temp1=uPD6121_read_code_8();//讀后面的系統(tǒng)、按健等數(shù)據(jù),temp2=uPD6121_read_code_8();teMP3=uPD6121_read_code_8();temp4=uPD6121_read_code_8();TR1=0:
if(decode_error==1)return1://無(wú)論是哪部分解碼出錯(cuò),都是重新開(kāi)始if((temp1!=Ntemp2)II(temp3!
=~temp4)){return1;}
sys_code=temp1:
key_code=temp3;data_available=1;return0:
如圖5所示,是我們完成紅外線實(shí)驗(yàn)所必需的設(shè)備,準(zhǔn)備好硬件設(shè)備后,我們將紅外線解碼控制程序通過(guò)A51編程器燒入AT89S51單片機(jī)芯片,然后將芯片插到增強(qiáng)型51實(shí)驗(yàn)板上通電運(yùn)行即可。
圖6為增強(qiáng)型51實(shí)驗(yàn)板做紅外解碼電路,從而進(jìn)行數(shù)碼管顯示的實(shí)驗(yàn)電路板。
最后,要提醒大家一下,在做紅外實(shí)驗(yàn)需要注意的是:不同的紅外線遙控器編碼方式可能不同,你可能會(huì)發(fā)現(xiàn)有很多紅外線遙控器的外表幾乎都一樣。
但對(duì)于同一電器設(shè)備卻有些能用,有些不能用,這就是因?yàn)檫b控器內(nèi)部使用了不同的編碼芯片的原因,或許你會(huì)想到用家中的電視機(jī)或空調(diào)的遙控器來(lái)完成紅外線解碼的實(shí)驗(yàn),但你必須得事先知道該遙控器的紅外線編碼芯片是什么類型的,否則就比較麻煩了,而現(xiàn)在眾多紅外線遙控器廠商為了保護(hù)自己的知識(shí)產(chǎn)權(quán)已將編碼芯片打磨,這對(duì)我們DIY愛(ài)好者來(lái)說(shuō)就不太有利了。圖5中的紅外線遙控器為uPD6121紅外編碼芯片。
