制造業(yè)中需要的線形驅(qū)動力,傳統(tǒng)的方法是用旋轉(zhuǎn)電機(jī)加滾珠絲杠的方式提供。實(shí)踐證明,在許多高精密、高速度場合,這種驅(qū)動已經(jīng)顯露出不足。在這種情況下直線電機(jī)應(yīng)運(yùn)而生。直線電機(jī)直接產(chǎn)生直線運(yùn)動,沒有中間轉(zhuǎn)換環(huán)節(jié),動力是在氣隙磁場中直接產(chǎn)生的,可獲得比傳統(tǒng)驅(qū)動機(jī)構(gòu)高幾倍的定位精度和快速響應(yīng)速度。
本文是在我系研制的交流永磁同步直線電機(jī)基礎(chǔ)上進(jìn)行基于矢量變換控制的驅(qū)動系統(tǒng)設(shè)計應(yīng)用。
2. 交流永磁同步直線電機(jī)工作原理
直線電機(jī)的工作原理上相當(dāng)于沿徑向展開后的旋轉(zhuǎn)電機(jī)。交流永磁同步直線電機(jī)通入三相交流電流后,會在氣隙中產(chǎn)生磁場,若不考慮端部效應(yīng),磁場在直線方向呈正弦分布。行波磁場與次級相互作用產(chǎn)生電磁推力,使初級和次級產(chǎn)生相對運(yùn)動。圖1所示為開發(fā)設(shè)計的交流永磁同步直線電機(jī)。
3. 永磁同步直線電機(jī)矢量控制原理
由于矢量控制動態(tài)響應(yīng)快,相比較標(biāo)量控制,在很快的時間內(nèi)就能達(dá)到穩(wěn)態(tài)運(yùn)行。經(jīng)過30多年工業(yè)實(shí)踐的考驗(yàn)、改進(jìn)與提高,目前已經(jīng)達(dá)到成熟階段[3],成為交流伺服電機(jī)控制的首選方法。因此,直線電機(jī)采用了交流矢量控制驅(qū)動的方法。
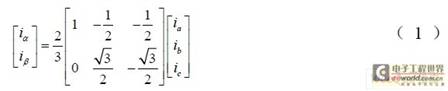
直線電機(jī)初級的三相電壓(U、V、W相)構(gòu)成了三相初級坐標(biāo)系(a,b,c軸系),其中的三相繞組相角相差120?,即在水平方向上互差1/3極距。參照旋轉(zhuǎn)電機(jī)矢量變換理論,設(shè)定兩相初級坐標(biāo)系(α-β軸系),由三相初級坐標(biāo)系到直角坐標(biāo)系轉(zhuǎn)換稱為Clark變換,見式(1)。
從靜止坐標(biāo)系到旋轉(zhuǎn)坐標(biāo)系的變換稱為Park變換,見式(2)。反之稱Park逆變換。

θ是d軸與 軸的夾角。根據(jù)旋轉(zhuǎn)電機(jī)的Park變換理論和兩電機(jī)結(jié)構(gòu)比較。由于電機(jī)運(yùn)動部分的不同,故直線電機(jī)動子相當(dāng)于旋轉(zhuǎn)電機(jī)定子,直線電機(jī)定子相當(dāng)于旋轉(zhuǎn)電機(jī)動子。所以在旋轉(zhuǎn)電機(jī)中旋轉(zhuǎn)坐標(biāo)系固定在動子上,旋轉(zhuǎn)坐標(biāo)系隨著電機(jī)轉(zhuǎn)子一起同步旋轉(zhuǎn)。在直線電機(jī)中,由運(yùn)動相對性原理,動子的直線運(yùn)動,可理解為定子相對于動子作反方向直線運(yùn)動,因此“旋轉(zhuǎn)坐標(biāo)系”(實(shí)際上此坐標(biāo)系是直線運(yùn)動的,應(yīng)稱之為直線運(yùn)動坐標(biāo)系)則固定在定子上,和定子一起相對于動子作直線運(yùn)動,如圖3所示。此時,直線電機(jī)動子向右作直線運(yùn)動,其定子則相對于動子向左直線運(yùn)動,固定在定子上的坐標(biāo)系也和定子一起相對于動子相對于動子向左運(yùn)動。動子內(nèi)部的行波磁場相對于動子本身是向左運(yùn)動,這樣站在固定在定子上的坐標(biāo)系上觀察此同步電機(jī)的行波磁場則是靜止的。于是讓d軸位于次級永磁體N極軸線上,q軸則超前d軸90?,也就是極距的1/4。θ由直線電機(jī)運(yùn)動時動子所處的位置決定。
4.永磁同步直線電機(jī)控制系統(tǒng)設(shè)計
根據(jù)直線電機(jī)工作原理,采用矢量變換設(shè)計其控制驅(qū)動系統(tǒng)。
控制器采用DSP處理器,選用TI公司的TMS320F2812 DSP。它是TI公司最新推出的32位定點(diǎn)高速數(shù)字信號處理器,150MIPS的執(zhí)行速度使得指令周期縮短至6.67ns,內(nèi)置12位的AD轉(zhuǎn)換器,最小轉(zhuǎn)換時間為80ns[4]。功率驅(qū)動部分采用IPM模塊, PWM頻率最高可達(dá)20K。
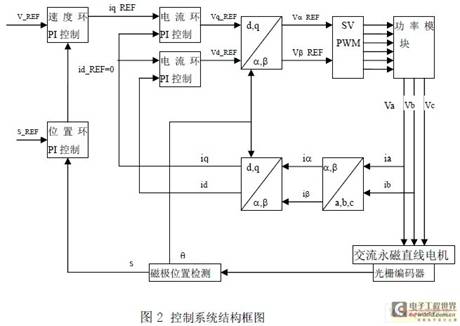
永磁同步直線電機(jī)驅(qū)動控制系統(tǒng)結(jié)構(gòu)框圖如圖3所示
5.軟件結(jié)構(gòu)
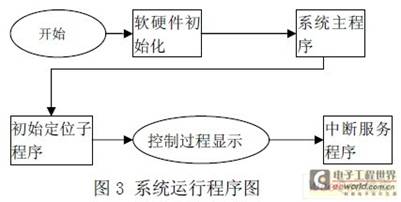
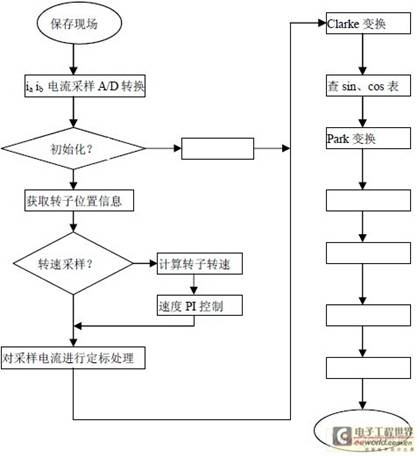
系統(tǒng)軟件包括軟硬件初始化程序、主程序、初始定位子程序、控制過程顯示程序和中斷服務(wù)子程序5個部分。系統(tǒng)復(fù)位后首先執(zhí)行初始化程序,實(shí)現(xiàn)對DSP內(nèi)部各功能模塊工作模式的設(shè)定和初始狀態(tài)的檢測;然后執(zhí)行主程序,開啟定時中斷、外部保護(hù)中斷及初始定位子程序;獲得動子準(zhǔn)確位置信息后,進(jìn)入運(yùn)行狀態(tài),執(zhí)行中斷服務(wù)子程序[5]。 系統(tǒng)的主要功能,包括電流大小的計算、速度位置信息和矢量變換,由中斷服務(wù)子程序來完成。根據(jù)系統(tǒng)運(yùn)行原理設(shè)計其軟件結(jié)構(gòu)。圖5為系統(tǒng)運(yùn)行程序圖:
系統(tǒng)中斷子程序圖如圖4所示:
6.結(jié)論
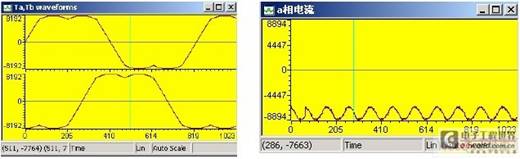
本文設(shè)計的算法程序已經(jīng)初步調(diào)試成功,能夠?qū)崿F(xiàn)基本運(yùn)行,證明軟硬件設(shè)計的正確性。圖5所示為部分調(diào)試結(jié)果
由于直線電機(jī)端部效應(yīng)及外部載荷直接加載等特點(diǎn),使得對直線電機(jī)控制系統(tǒng)穩(wěn)定提出了較高要求。為提高其控制的魯棒性,其算法還有待于繼續(xù)改進(jìn)。必須采取合適的控制算法和控制策略,使系統(tǒng)動態(tài)響應(yīng)快,抗干擾能力強(qiáng),穩(wěn)態(tài)跟蹤精度高。因此直線電機(jī)控制理論有待于進(jìn)一步深入的探討與研究。
本文作者的創(chuàng)新點(diǎn):分析了永磁同步直線電機(jī)與旋轉(zhuǎn)電機(jī)的矢量變換理論的區(qū)別之處,并在此基礎(chǔ)上基于TMS320F2812 DSP實(shí)現(xiàn)其控制系統(tǒng)。
