
1,、引言
隨著電力電子技術(shù)的高速發(fā)展,,電力電子設(shè)備與人們的工作、生活的關(guān)系日益密切,,而電子設(shè)備都離不開可靠的電源,。開關(guān)電源是利用現(xiàn)代電力電子技術(shù),控制開關(guān)晶體管開通和關(guān)斷的時間比率,,維持穩(wěn)定輸出電壓的一種電源,,開關(guān)電源一般由脈沖寬度調(diào)制(PWM)控制IC和MOSFET構(gòu)成。開關(guān)電源控制部分絕大多數(shù)是按照模擬信號來設(shè)計和工作的,,缺點是抗干擾能力很差,。由于計算機控制技術(shù)突飛猛進地發(fā)展,數(shù)字信號的處理和控制顯示出了明顯的優(yōu)勢:便于計算機處理和控制,,設(shè)計的靈活性大大提高,,軟件調(diào)試方便等,出現(xiàn)了PID控制,。
它使開關(guān)電源向數(shù)字化,、智能化、多功能化方向發(fā)展,。這無疑提高了開關(guān)電源的性能和可靠性,。但由于開關(guān)電源本身是一個非線性的對象,其精確模型的建立是相當困難的,,常采用近似處理,,并且其供電系統(tǒng)和負載變化具有不確定性,所以采用上述模擬或數(shù)字PID控制方法常常難以使PID調(diào)節(jié)器的參數(shù)隨之變化,,控制效果不理想,。近來發(fā)展起來的無模型控制是前景廣闊的控制方法。它不依賴被控對象的數(shù)學(xué)模型,,集建模與控制一體化,,這對于一些復(fù)雜可變的或結(jié)構(gòu)不確定難以用準確的數(shù)學(xué)模型描述的系統(tǒng)而言是非常適宜的,改進了開關(guān)電源的控制系統(tǒng),,不僅滿足開關(guān)電源的高性能和高可靠性的要求,。
2、開關(guān)電源的工作原理
本開關(guān)電源原理框圖如圖1所示,。電網(wǎng)電壓通過輸入回路中的整流器和濾波器轉(zhuǎn)換為直流電壓輸入高頻變換器,,高頻變換器則把輸入的直流電壓轉(zhuǎn)變?yōu)楦哳l脈沖方波電壓,該脈沖方波通過輸出回路中的高頻整流器和濾波器變成直流電壓供給負載,。
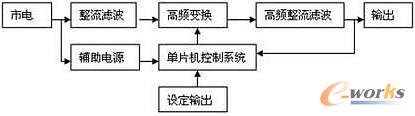
圖1 開關(guān)電源工作原理
以微型計算機為核心的控制回路,,在控制軟件的支持下對開關(guān)電源的輸出電壓、電流采樣,,并與給定的數(shù)據(jù)進行比較,,然后去調(diào)整和控制逆變器,, 改變MOSFET管的導(dǎo)通頻率或?qū)ǎ刂箷r間以穩(wěn)定輸出,并監(jiān)測開關(guān)電源的工作狀態(tài),。
3,、開關(guān)電源硬件系統(tǒng)組成
開關(guān)電源的控制系統(tǒng)可以根據(jù)項目的實際情況選擇不同的微處理器。其組成原理框圖如圖2所示,。上電/復(fù)位電路給微處理器提供穩(wěn)定的電源和復(fù)位功能,。輸出電壓反饋用來調(diào)節(jié)輸出電壓值,保持輸出電壓的穩(wěn)定,,電流反饋電路與電壓反饋功能相似,。數(shù)碼管顯示電路和鍵盤輸入電路實現(xiàn)人機交互的功能。PWM輸出驅(qū)動電路輸出脈沖來控制開關(guān)管的開通和關(guān)斷,,當輸出電壓高于要求電壓時,,輸出脈沖的寬度就減小,從而減小輸出電壓,;當輸出電壓低于要求電壓時,,輸出脈沖的寬度就增大,從而增大輸出電壓,。
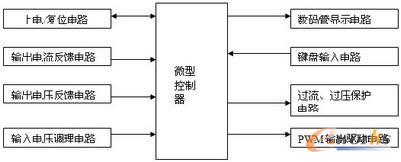
圖2
4,、無模型控制原理
4.1 無模型控制的總體概述
在控制律設(shè)計中一般的需要建立動態(tài)系統(tǒng)的數(shù)學(xué)模型。經(jīng)典的方法要求這種數(shù)學(xué)模型必 須事先建立至少其結(jié)構(gòu)必須事先確定,。而且模型愈精確愈好,。無模型控制律的設(shè)計中,突破了控制律對數(shù)學(xué)模型盡可能事先精確的建立這一要求的限制,。
我們的建模手續(xù)是伴隨反饋控制而進行的,。初始的數(shù)學(xué)模型可以是不精確的,但必須保證所設(shè)計的控制律具有一定的收斂性.我們所設(shè)計的無模型控制律是邊建模邊控制,,得到新的觀測數(shù)據(jù)后,,再建模再控制.如此繼續(xù)下去,使得每次得到的數(shù)學(xué)模型逐漸精確,,從而控制律的性能也隨之得到改善,。我們把這種手續(xù)稱之為實時建模與反饋控制一體化手續(xù)。
4.2 建模與自適應(yīng)控制一體化途徑
在參考文獻中,,提出了如下的泛模型:
y(k)-y(k-1)=φ(k-1)[u(k-1)-u(k-2)> (4-1)
不失一般性,,這里假定被控動態(tài)系統(tǒng)S的時滯是1,y(k) 是系統(tǒng)S的一維輸出, u(k-1)是P維輸人,。φ(k)是特征參量,,它是利用某種辨識算法在線估計的,k是離散時間。我們將會看出,,在實時辨識―實時反饋校正的辨識與控制一體化手續(xù)中,φ(k)有明顯的數(shù)學(xué)與工程意義,。
4.3 實時建模與反饋控制一體化
具體的,,我們的建模與反饋控制一體化的框架如下:
(1)依據(jù)觀測數(shù)據(jù)和泛模型
y(k)-y(k-1)=φ(k-1)[u(k-1)-u(k-2)]
利用適當?shù)墓乐捣椒ǎ玫搅?phi;(k-1)的估值φ(k-1),。
(2)尋求φ(k-1)的向前一步的預(yù)報值φ*(k),,一個簡單的方法就是取
φ*(k)= φ*(k-1)
在尋求控制律時,我們把φ*(k)仍記成社φ(k) ,。
(3)把控制律
作用于系統(tǒng)S,,得到新的輸出貝y(k+1)。于是得到了一組新的數(shù)據(jù){y(k+1),u(k)} ,。
在這組新數(shù)據(jù)的基礎(chǔ)上重復(fù)(1),,(2)和(3),即可又得出新的數(shù)據(jù){y(k+2),u(k+1)}如此繼續(xù)下去,。只要系統(tǒng)S滿足一定的條件,,在這種手續(xù)的作用下,系統(tǒng)s的輸出y(k)將逐漸地逼近y0,。
4.4 控制器程序的設(shè)計
目前在工業(yè)生產(chǎn)過程控制中應(yīng)用的控制器,,絕大多數(shù)是經(jīng)典的PID調(diào)節(jié)器及其變種,對于耦合情況不嚴重的系統(tǒng),,PID調(diào)節(jié)器的控制效果還能令人滿意,,但對耦合嚴重的系統(tǒng),PID調(diào)節(jié)器則顯得無能為力,,下面以PID調(diào)節(jié)器為基準,,將無模型控制器與PID調(diào)節(jié)器進行比較,用于說明無模型控制器具備較好的解耦和抗干擾能力,。無模型控制流程圖如下:
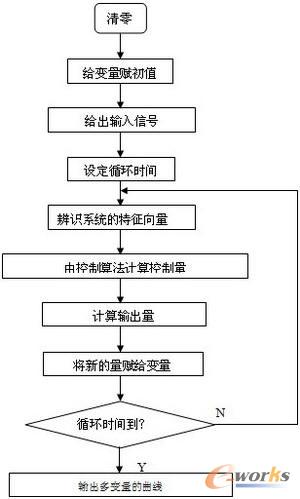
圖3 無模型控制流程圖
5,、試驗結(jié)果
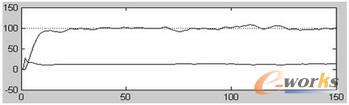
這里對無模型控制器與PID調(diào)節(jié)器的解耦能力進行仿真比較,為了比較的公平性,,將無模型控制器與PID調(diào)節(jié)器的參數(shù)都整定到較佳狀態(tài),,對下述系統(tǒng)進行控制??刂平Y(jié)果如圖4和圖5所示:
u(t) y(t)
圖4 PID控制情形仿真結(jié)果
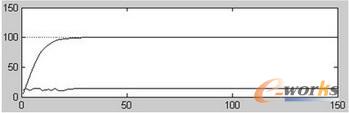
u(t) y(t)
圖5 無模型控制仿真圖
由仿真結(jié)果可以清楚地看到,,無模型控制器和PID調(diào)節(jié)器對非線形情形系統(tǒng)的控制都收到了良好的效果,但無模型控制方法對非線性耦合情形的控制能力比PID調(diào)節(jié)器強很多,。
6,、結(jié)束語
無模型控制適合非線性控制,其控制規(guī)則不需要確定具體對象的模型,,對于像開關(guān)電源這種非線性對象的控制具有相當好的穩(wěn)定性和抗干擾能力,。無模型控制策略的引入,,為開關(guān)電源的發(fā)展開創(chuàng)了廣闊的空間。