
設(shè)計任務(wù)
設(shè)計并制作一個帆板控制系統(tǒng),通過對風(fēng)扇轉(zhuǎn)速的控制,調(diào)節(jié)風(fēng)力大小,改變帆板轉(zhuǎn)角θ,如圖1所示。帆板形式及具體制作尺寸如圖2所示。
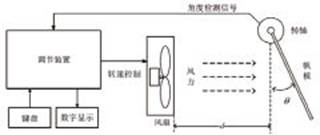
圖1 帆板控制系統(tǒng)示意圖

圖2 帆板制作尺寸圖
根據(jù)題目要求,設(shè)計任務(wù)要實現(xiàn)風(fēng)扇和帆板之間的距離在一定范圍內(nèi)變動時,在規(guī)定的時間內(nèi),自動調(diào)節(jié)帆板達(dá)到通過鍵盤設(shè)定的預(yù)置轉(zhuǎn)角(下文簡稱:預(yù)置參數(shù)),同時對控制過程中的相關(guān)數(shù)據(jù)進(jìn)行實時處理并顯示。
設(shè)計思路:以AVR單片機(jī)為核心,采用閉環(huán)控制,角度傳感器檢測帆板的實際轉(zhuǎn)動角度,單片機(jī)定時采集,與帆板預(yù)置參數(shù)進(jìn)行比較,生成調(diào)控風(fēng)扇電機(jī)的PWM信號;用LCD屏顯示預(yù)置參數(shù)、帆板的轉(zhuǎn)動角度、調(diào)節(jié)用的PWM信號及調(diào)控過程完成的時間等內(nèi)容。
系統(tǒng)硬件設(shè)計與實現(xiàn)
硬件概述
系統(tǒng)由以下幾個基本模塊組成:電源模塊、單片機(jī)控制模塊、電機(jī)驅(qū)動模塊、顯示與聲光報警模塊、鍵盤模塊和角度檢測模塊。整個系統(tǒng)框圖如圖3所示。
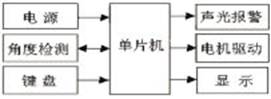
圖3 系統(tǒng)框圖
(1)控制模塊:采用AVR單片機(jī)控制;
(2)角度檢測模塊:采用ADXL345角度傳感器;
(3)風(fēng)扇類型:采用軸流式的電吹風(fēng)風(fēng)扇;
(4)電機(jī)驅(qū)動方式:采用L298電機(jī)驅(qū)動芯片;
(5)顯示模塊:用LCD1602液晶模塊進(jìn)行顯示;
(6)電源模塊:采用LM2576開關(guān)型降壓穩(wěn)壓芯片。
角度檢測電路
角度傳感器選用三軸加速度計ADXL345。其輸出數(shù)據(jù)為16位二進(jìn)制補(bǔ)碼格式,可通過SPI(3線或4線)或I2C數(shù)字接口訪問。對ADXL345的數(shù)據(jù)累計采樣50次,取其平均值作為結(jié)果,這種方法成功的解決了風(fēng)帆擺動不穩(wěn)的難題。單片機(jī)依據(jù)該值大小與預(yù)置參數(shù)運(yùn)算,最后生成調(diào)節(jié)風(fēng)扇電機(jī)轉(zhuǎn)速的PWM信號。
ADXL345與單片機(jī)采用I2C模式通信,電路如圖4所示。角度檢測電路由IC1、IC3、R15、R16組成。

圖4 角度檢測電路
驅(qū)動電路
電機(jī)驅(qū)動模塊L298內(nèi)部包含4通道邏輯驅(qū)動電路,是一種為二相和四相電機(jī)配備的專用驅(qū)動器,內(nèi)含二個H橋的高電壓大電流雙全橋式驅(qū)動器,接收標(biāo)準(zhǔn)TTL邏輯電平信號,可驅(qū)動雙電機(jī)。電機(jī)驅(qū)動接線電路如圖5所示。

圖5 電機(jī)驅(qū)動電路
在電路中,風(fēng)扇電機(jī)接在L298的OUTl、OUT2輸出端口上,控制電機(jī)正反轉(zhuǎn)的兩個輸入引腳,7腳通過電阻R4接在電源上,9腳直接接地。控制風(fēng)扇電機(jī)轉(zhuǎn)速的PWM信號,由單片機(jī)的PD5引腳輸出,通過隔離光耦I(lǐng)C5接在使能控制端8引腳上,L298輸出的通斷時間受控于PWM的變化,實現(xiàn)了單片機(jī)調(diào)節(jié)風(fēng)扇電機(jī)的轉(zhuǎn)速大小,最終控制了吹動帆板轉(zhuǎn)動的風(fēng)力強(qiáng)弱。電路中的D1~D4起續(xù)流二極管作用。
聲光報警和按鍵電路
系統(tǒng)中設(shè)計了聲光報警電路,見圖6所示。當(dāng)帆板旋轉(zhuǎn)到預(yù)置參數(shù)時,由單片機(jī)控制其工作,并持續(xù)5秒鐘報警。它由電阻R5、R18、發(fā)光二極管D5、三極管Q1和揚(yáng)聲器LS1組成。當(dāng)單片機(jī)的PA5引腳輸出低電平信號時,二極管發(fā)光,蜂鳴器發(fā)出聲音,實現(xiàn)聲光報警。

圖6 聲光報警、鍵盤電路
系統(tǒng)中的按鍵功能是控制風(fēng)帆電機(jī)的運(yùn)動和設(shè)定帆板的轉(zhuǎn)角參數(shù)值。各鍵功能如下:
S1:起動鍵,點動后,電機(jī)起動;
S2:停止鍵,點動后,電機(jī)停止;
S3:確認(rèn)鍵,首次操作,允許設(shè)定預(yù)置參數(shù),再次操作,退出,并存儲參數(shù)(預(yù)置參數(shù)存在單片機(jī)的EEPROM中);
S4:加1鍵,點動1次,預(yù)置參數(shù)個位數(shù)值加1;
S5:加1鍵,點動1次,預(yù)置參數(shù)十位數(shù)值加1。
電源
LM2576開關(guān)型穩(wěn)壓器的效率比三端線性穩(wěn)壓器要高的多,有優(yōu)異的線性和負(fù)載調(diào)整能力,其內(nèi)部含有頻率補(bǔ)償器和一個固定頻率振蕩器,可將外部元件數(shù)目減到最少且使用方便。電源電路如圖7所示。

圖7 電源電路
為了解決帆板在與風(fēng)機(jī)近距離且小角度轉(zhuǎn)動時,其穩(wěn)定性不易精確控制的難題,我們采用可自動跳變的雙電源,即供給L298芯片的主電源VCC_K有9V和20V兩種電壓。單片機(jī)根據(jù)預(yù)置參數(shù)的大小,控制三極管Q2驅(qū)動繼電器K1,自動切換兩種電源的輸出。
顯示電路略。
系統(tǒng)軟件設(shè)計
PWM算法設(shè)計
由于風(fēng)扇與帆板之間的距離d不固定,每次風(fēng)扇電機(jī)起動時,PWM先按最大值距離時預(yù)置參數(shù)對應(yīng)的PWM2值給定,當(dāng)控制帆板轉(zhuǎn)到預(yù)置參數(shù)值后,PWM值按下列公式計算出。
PWM=PWM2-((PWM2-PWM1)/K)×(θ1-θ2)
θ1=帆板轉(zhuǎn)動的實際角度值;
θ2=預(yù)置參數(shù);
PWM1最小距離時θ2對應(yīng)的PWM值(由實驗獲得);
PWM2最大距離時θ2對應(yīng)的PWM值(由實驗獲得);
K=d+13
PWM賦值范圍是0~255。
軟件流程設(shè)計
角度檢測單元
角度檢測單元主程序流程框圖見圖8所示,主要包括:
(1)初始化:I2C模式通信設(shè)置、定時器中斷等;
(2)采集判斷:采集完成標(biāo)志位有效,傳感器的數(shù)據(jù)保留;
(3)數(shù)據(jù)運(yùn)算:每次采集到實際角度的信息,線性化后轉(zhuǎn)換成可顯示的角度值;
(4)50次采集判斷:是否完成了50次角度數(shù)據(jù)采集;
(5)生成偏差量:實測帆板轉(zhuǎn)角與預(yù)置參數(shù)運(yùn)算,生成待調(diào)節(jié)的偏差量。

圖8 角度檢測單元主程序流程框圖
控制單元
控制單元主程序流程,主要包括初始化、起動按鍵判斷與處理、停止按鍵判斷與處理、報警判斷與處理和設(shè)置參數(shù)判斷與處理等。
(1)初始化:主要包括引腳配置初始化、相關(guān)參數(shù)初始化等;
(2)起動按鍵判斷與處理:按鍵有效,執(zhí)行電機(jī)起動子程序(主要工作:讀出EEPROM中預(yù)置參數(shù),由PWM信號控制電機(jī)驅(qū)動器輸出,并累計控制過程的用時);
(3)停止按鍵判斷與處理:按鍵有效,執(zhí)行電機(jī)停止子程序(主要工作:停止電機(jī)驅(qū)動器輸出,并清零累計控制過程的時間);
(4)報警判斷與處理:帆板轉(zhuǎn)到預(yù)置參數(shù)時,執(zhí)行聲光報警子程序(主要工作:聲光報警,停止累計控制過程的用時);
(5)設(shè)置參數(shù)判斷與處理:按鍵有效,執(zhí)行參數(shù)設(shè)定子程序(主要工作:實現(xiàn)帆板轉(zhuǎn)動的預(yù)置參數(shù)設(shè)定,并存儲保留參數(shù)值)。
測試方案與測試結(jié)果
1.測試儀器:量角器、刻度尺、示波器、溫度計、數(shù)字萬用表。
2.測試結(jié)果分析:經(jīng)反復(fù)測試,要達(dá)到分辨力為1°、絕對誤差≤3°、調(diào)整時間小于3秒、距離d在5cm~18cm 范圍可變、旋轉(zhuǎn)角度在0~20°之間變化時,電機(jī)供電電壓應(yīng)為9V;當(dāng)風(fēng)帆轉(zhuǎn)角在21°~70°之間變化時,電機(jī)供電電壓應(yīng)為20V。對應(yīng)的PWM數(shù)據(jù)如表1所示。
表1 PWM數(shù)據(jù)

作者信息:遼寧機(jī)電職業(yè)技術(shù)學(xué)院
本文為中電網(wǎng)及《世界電子元器件》雜志版權(quán)所有,如轉(zhuǎn)載請務(wù)必注明出處。