
0 引言
SLD作為光纖陀螺系統(tǒng)的核心器件,其工作特性會(huì)影響整個(gè)系統(tǒng)的性能及可靠性,因此研究如何對(duì)SLD特性參數(shù)進(jìn)行快速準(zhǔn)確地測(cè)量以完成對(duì)器件性能的評(píng)價(jià)與篩選就具有重要的實(shí)際意義。現(xiàn)有的特性測(cè)試系統(tǒng)多由分立設(shè)備組成,并且體積較大造價(jià)昂貴,也不具備現(xiàn)場(chǎng)測(cè)試所需的便攜性,而且工作模式單一。
針對(duì)以上問題,本文提出了一種可實(shí)現(xiàn)便攜式的SLD測(cè)控系統(tǒng)設(shè)計(jì)方案,簡(jiǎn)述了其總體設(shè)計(jì),重點(diǎn)討論了系統(tǒng)實(shí)現(xiàn)中的關(guān)鍵技術(shù),然后對(duì)實(shí)際系統(tǒng)進(jìn)行了性能測(cè)試,分別測(cè)試了注入電流、光功率和溫度的穩(wěn)定性,最后給出了對(duì)實(shí)際SLD器件的特性測(cè)試結(jié)果。
1 系統(tǒng)工作原理及設(shè)計(jì)方案
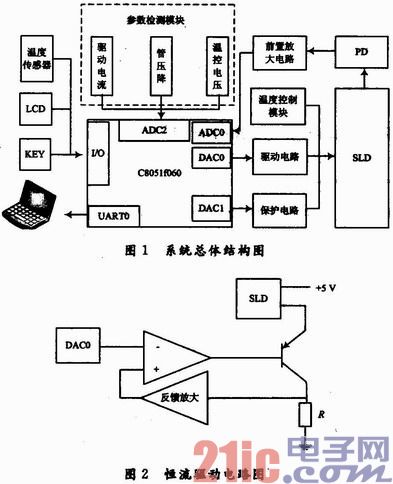
系統(tǒng)的總體設(shè)計(jì)如圖1所示。該系統(tǒng)主要以嵌入式微控制器C8051F060為控制核心,利用其內(nèi)部集成的2個(gè)16位的ADC模塊、2個(gè)12位DAC模塊和1個(gè)8位的ADC模塊便構(gòu)成了一個(gè)基本片上數(shù)據(jù)控制采集系統(tǒng),這使得設(shè)計(jì)體積小、低功耗、高可靠性的便攜式SLD測(cè)控系統(tǒng)成為可能,同時(shí)也大大降低了成本。整個(gè)系統(tǒng)主要由驅(qū)動(dòng)模塊、溫度控制模塊、參數(shù)檢測(cè)模塊和人機(jī)接口模塊組成。其中驅(qū)動(dòng)模塊為器件提供3種驅(qū)動(dòng)方式:恒電流驅(qū)動(dòng)、恒功率驅(qū)動(dòng)和LIV測(cè)試;溫度控制模塊通過調(diào)節(jié)熱電制冷器的電流大小和方向來保持器件工作溫度穩(wěn)定;參數(shù)采集模塊檢測(cè)出器件的驅(qū)動(dòng)電流、管壓降、光功率、溫度控制電壓等數(shù)據(jù),并送至微控制器的ADC模塊進(jìn)行預(yù)處理,由LCD實(shí)時(shí)顯示;同時(shí),通過鍵盤可以設(shè)定系統(tǒng)的工作方式和參數(shù)大小,如為L(zhǎng)IV測(cè)試則上述數(shù)據(jù)可通過串口與計(jì)算機(jī)通信實(shí)現(xiàn)遠(yuǎn)程控制。
2 驅(qū)動(dòng)模塊設(shè)計(jì)
驅(qū)動(dòng)模塊主要由驅(qū)動(dòng)電路、保護(hù)電路和前置放大電路3部分組成。該模塊可以提供3種工作方式即恒電流驅(qū)動(dòng)方式、恒光功率驅(qū)動(dòng)方式和LIV測(cè)試方式。
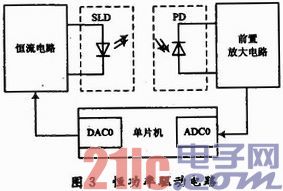
2.1 恒流驅(qū)動(dòng)
恒流驅(qū)動(dòng)是對(duì)SLD的注入電流進(jìn)行穩(wěn)恒控制的一種控制方式,實(shí)質(zhì)上是一個(gè)采用電流串聯(lián)負(fù)反饋的壓控電流源。其原理圖如圖2所示。
由微控制器的DAC0設(shè)定一個(gè)無抖動(dòng)的電壓,此電壓加在運(yùn)算放大器的反向輸入端,由運(yùn)算放大器和三極管構(gòu)成V-I轉(zhuǎn)換器,由此獲得相應(yīng)的輸出電流,輸出電流流經(jīng)取樣電阻R獲得取樣電壓,該取樣電壓經(jīng)過放大后反饋回運(yùn)算放大器的正向輸入端,通過與設(shè)定電壓的比較,對(duì)輸出電流進(jìn)行控制,從而形成閉環(huán)反饋的動(dòng)態(tài)平衡,使輸出電流恒定。根據(jù)虛短-虛斷原則,輸出電流值為電壓設(shè)定值與取樣電阻阻值之比,即:
I=VDAC0/R (1)
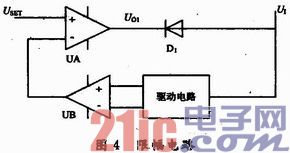
2.2 恒光功率驅(qū)動(dòng)
恒功率驅(qū)動(dòng)是對(duì)SLD的輸出光功率進(jìn)行穩(wěn)恒控制的一種控制方式,圖3所示為恒功率驅(qū)動(dòng)電路原理圖。通過一個(gè)內(nèi)部集成的光電探測(cè)器(PD)來監(jiān)測(cè)器件的輸出光功率,其分光比為5%,將抽樣光信號(hào)轉(zhuǎn)換成為電信號(hào),通過前置放大電路將監(jiān)測(cè)到的光電流信號(hào)進(jìn)行放大。并將放大后的信號(hào)傳送至單片的16位ADC0模塊進(jìn)行模/數(shù)轉(zhuǎn)換。轉(zhuǎn)換后的數(shù)字量與設(shè)定數(shù)字量進(jìn)行比較,對(duì)偏差進(jìn)行補(bǔ)償,調(diào)整加在恒流電路上的設(shè)定電壓值,從而調(diào)整SLD的注入電流。整個(gè)控制過程形成閉環(huán)動(dòng)態(tài)平衡,從而使輸出光功率恒定。
2.3 LIV測(cè)試
LIV測(cè)試是在遠(yuǎn)程控制時(shí)改變SLD注入電流I的同時(shí)測(cè)試SLD輸出的光功率L和SLD兩端的正向電壓V,采集到的數(shù)據(jù)以LIV特性識(shí)別曲線顯示,包括表示電抗特性的V-I曲線,表示光電轉(zhuǎn)化特性的L-I曲線。在LIV測(cè)試模式下,由遠(yuǎn)程計(jì)算機(jī)設(shè)定測(cè)試參數(shù)后,由驅(qū)動(dòng)模塊產(chǎn)生步進(jìn)的驅(qū)動(dòng)電流,參數(shù)檢測(cè)模塊將每個(gè)步進(jìn)點(diǎn)的管壓降V,驅(qū)動(dòng)電流I,光功率L自動(dòng)記錄下來,并繪制LIV曲線。這些數(shù)據(jù)和曲線可用來分析SLD的特性,如外量子效率、閾值電流等。
2.4 保護(hù)電路
SLD屬于昂貴的半導(dǎo)體器件,其損壞大多是由于靜電和浪涌擊穿造成的。為了消除這些電沖擊對(duì)器件的損傷,延長(zhǎng)器件的使用壽命,設(shè)計(jì)了靜電保護(hù)電路和限幅電路。
2.4.1 靜電保護(hù)電路
將一個(gè)接觸電阻很小的繼電器與SLD并聯(lián)在一起構(gòu)成短路保護(hù)開關(guān)。在SLD不進(jìn)行工作時(shí)開關(guān)閉合,這樣未開機(jī)時(shí),SLD兩端的電極被短接,從而實(shí)現(xiàn)了防止靜電擊穿的功能。在實(shí)際應(yīng)用中,除了常閉開關(guān)外,在SLD的兩個(gè)電極并聯(lián)一個(gè)二極管,防止器件由于極性接反而損壞;還在SLD的陽(yáng)極和陰極之間并連一個(gè)電容,這個(gè)電容不但可以限制SLD兩端電壓突變,還可以濾除SLD驅(qū)動(dòng)電流上的高頻干擾電流。
2.4.2 限幅電路
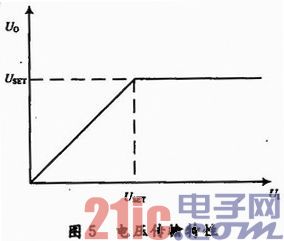
每個(gè)SLD都有安全工作電流范圍,如果電流超過此范圍,SLD將會(huì)損壞,因此必須將SLD的工作電壓限制在給定的范圍內(nèi)。限幅電路的設(shè)計(jì)基于比較器原理。圖4所示為設(shè)計(jì)的限幅保護(hù)電路,主要由集成運(yùn)放UA,儀表放大器UB和二極管D1組成。
工作時(shí),輸入電壓UI作用于驅(qū)動(dòng)電路,并將流過SLD的電流經(jīng)過取樣電阻進(jìn)行I-V轉(zhuǎn)換后由UB采樣得到取樣電阻的壓差Usample,由式(1)可知U1=Usample,將其與限幅電路的上限值進(jìn)行比較。當(dāng)輸入電壓UI值小于設(shè)定值USET時(shí),UA輸出UO1>0,所以D1截止,UI直接作用在驅(qū)動(dòng)電路上;當(dāng)輸入電壓值UI于設(shè)定值USET時(shí),UA輸出UO1<0,所以D1導(dǎo)通,輸入電壓UI被下拉至USET,從而實(shí)現(xiàn)了限幅保護(hù)的功能。
USET為保護(hù)電路的上限電壓值,限幅電路的電壓傳輸特性如圖5所示。
3 溫度控制模塊設(shè)計(jì)
環(huán)境溫度的變化會(huì)對(duì)SLD的工作穩(wěn)定性產(chǎn)生影響,為了使SLD輸出功率穩(wěn)定必須使其工作溫度恒定。溫度控制的核心器件采用ADN8830集成溫度控制器,該芯片體積小,噪聲低,可提供雙向溫控電流獨(dú)立驅(qū)動(dòng)TEC,長(zhǎng)時(shí)間控制精度可達(dá)士0.01℃,并且具有限流保護(hù)和溫度設(shè)定功能。溫度控制的執(zhí)行機(jī)構(gòu)為SLD內(nèi)部集成的半導(dǎo)體致冷器又稱熱電制冷器(Thermo Electric Cooler,TEC),溫度傳感器則是其內(nèi)部集成的熱敏電阻(NTC)。溫度控制模塊原理如圖6所示。
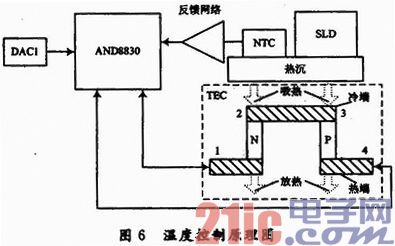
由微控制器的DAC1產(chǎn)生溫度控制電壓連接至ADN8830的溫度設(shè)定端,可設(shè)定器件的工作溫度。通過向TEC提供雙向的驅(qū)動(dòng)電流來控制TEC的加熱和制冷作用,當(dāng)SLD管芯溫度變化時(shí),NTC感測(cè)溫度的變化并將溫度的變化轉(zhuǎn)換為電信號(hào),該信號(hào)經(jīng)過反饋網(wǎng)絡(luò)返回ADN8830。ADN8830通過自身的內(nèi)部補(bǔ)償網(wǎng)絡(luò)調(diào)整輸入TEC電漉的方向和大小,形成閉環(huán)控制過程,從而達(dá)到溫度的恒定。
4 參數(shù)檢測(cè)模塊設(shè)計(jì)
該模塊采用高精度的儀表放大器來實(shí)時(shí)測(cè)量SLD的管壓降、驅(qū)動(dòng)電流、光功率和溫度控制電壓等。參數(shù)檢測(cè)模塊原理如圖7所示。
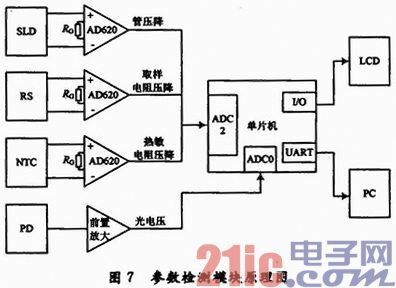
選用高精度儀表放大器AD620來提取相關(guān)參數(shù),其放大倍數(shù)為G=1+(50 kΩ/RG),輸出電壓Vo=(V+-V-)×G,一般將RG斷路,此時(shí)運(yùn)放輸出電壓即為運(yùn)放正向輸入端與反向輸入端的壓差。將AD620輸出的信號(hào)送至單片機(jī)的8路10位ADC2模塊進(jìn)行模數(shù)轉(zhuǎn)換,進(jìn)行數(shù)據(jù)計(jì)算和處理。
由于取樣電阻的阻值是固定的,所以將取樣電阻壓降與取樣電阻阻值求商即可得到驅(qū)動(dòng)電流值。
熱敏電阻兩端的電壓為:
![]()
式中VE為熱敏電阻橋電路的供電電壓;VE=1.25 V,RT為熱敏電阻的阻值。由式(2)可知,NTC的壓降即可換算為熱敏電阻阻值。又已知1℃對(duì)應(yīng)熱敏電阻500 Ω變化,從而采樣熱敏電阻壓降變化即可判斷溫度的變化。
在光功率探測(cè)部分已知分光器件的輸入分光比為5%,同時(shí)光功率與光電流呈線性光系,在前置放大電路將光電流信號(hào)放大轉(zhuǎn)換成光電壓信號(hào),則光功率與光電壓呈線性關(guān)系。將光電壓值送至單片機(jī)的16位ADC0模塊進(jìn)行模/數(shù)轉(zhuǎn)換,由此即可檢測(cè)輸出光功率的大小。
將測(cè)量所得的各項(xiàng)參數(shù)經(jīng)過單片機(jī)處理后,可以通過液晶顯示器(LCD)實(shí)時(shí)顯示出來,方便用戶讀取實(shí)時(shí)的工作參數(shù)。也可以經(jīng)過串口將測(cè)量數(shù)據(jù)發(fā)送至計(jì)算機(jī)進(jìn)行存儲(chǔ)和進(jìn)一步分析。
5 系統(tǒng)性能測(cè)試與分析
為評(píng)價(jià)該系統(tǒng)的性能,利用該系統(tǒng)對(duì)電子44所生產(chǎn)的SLD器件分別進(jìn)行了2 h的恒流穩(wěn)定性測(cè)試、恒功率穩(wěn)定性測(cè)試、溫度控制穩(wěn)定性測(cè)試和LIV測(cè)試。這里穩(wěn)定度的定義為輸出量的變化量與輸出量的平均值之比,即,穩(wěn)定度=(最大值-最小值)/平均值。
5.1 驅(qū)動(dòng)電流穩(wěn)定性測(cè)試
在室溫下,采用恒流模式連續(xù)測(cè)量2 h的驅(qū)動(dòng)電流,每2 min采一個(gè)點(diǎn),其中設(shè)定驅(qū)動(dòng)電流為130 mA。測(cè)量數(shù)據(jù)如圖8所示。
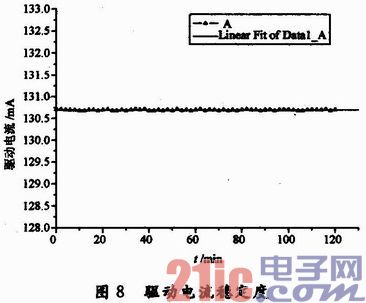
由上圖可以得出,驅(qū)動(dòng)電流最大值為130.71 mA,最小值為130.68 mA,平均值130.69 mA。計(jì)算其穩(wěn)定度:穩(wěn)定度=(130.71—130.68)/130.69=0.023%。
5.2 輸出功率穩(wěn)定性測(cè)試
在室溫下,采用恒光功率模式連續(xù)測(cè)量2個(gè)小時(shí)輸出光功率,每2分鐘采一個(gè)點(diǎn),設(shè)定輸出光功率為445μW。測(cè)量數(shù)據(jù)如圖9所示。
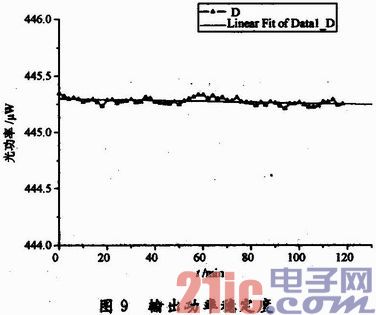
由上圖可以得出,輸出最大光功率為445.344μW,最小光功率為445.222μW,平均值為445.292μW。計(jì)算其穩(wěn)定度:穩(wěn)定度=(445.344 —445.222)/445.292=0.026%。
5.3 溫度控制穩(wěn)定性測(cè)試
由于不能夠直接對(duì)SLD組件內(nèi)部溫度進(jìn)行測(cè)量,因此通過測(cè)量熱敏電阻兩端的電壓來間接的評(píng)定溫度控制穩(wěn)定度。在室溫下進(jìn)行了2 h測(cè)試,其中控制溫度設(shè)定在25℃。測(cè)量數(shù)據(jù)如圖10所示。
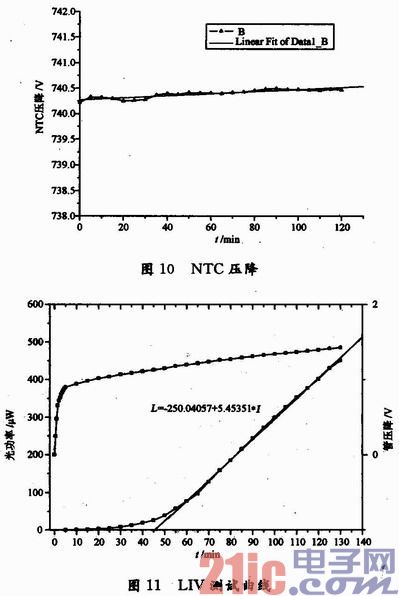
由上圖可以看出,NTC壓降最大值為740.5 mV,最小值為740.16 mV,變化量為0.34 mV。由式(1)可以算出熱敏電阻變化量為16Ω,根據(jù)熱敏電阻的阻值與溫度的關(guān)系可以計(jì)算出溫度最大變化為0.03℃。
5.4 LIV特性測(cè)試
利用該系統(tǒng)對(duì)該器件還進(jìn)行了LIV特性測(cè)試,其中步進(jìn)電流為5 mA,驅(qū)動(dòng)范圍為0~130 mA,測(cè)量數(shù)據(jù)如圖11所示。
對(duì)L-I曲線進(jìn)行擬合后可得光功率與驅(qū)動(dòng)電流的關(guān)系為L(zhǎng)=-250.040 57+5.453 51I,由此可計(jì)算出閾值電流為46 mA,外量子效率為η=
dP/dI=5.45μW/mA。
6 結(jié)論
基于嵌入式微控制器C8051F060設(shè)計(jì)了一種SLD數(shù)字測(cè)控系統(tǒng),該系統(tǒng)集成程度高、體積小、操作簡(jiǎn)單,在便攜式的同時(shí)還具有較高的性能。該系統(tǒng)不但可以為SLD器件提多功能的驅(qū)動(dòng),包括恒流驅(qū)動(dòng)、恒功率驅(qū)動(dòng)和恒溫度控制;同時(shí)還可以作為L(zhǎng)IV測(cè)試系統(tǒng)對(duì)器件進(jìn)行特性測(cè)試與表征。
測(cè)試結(jié)果表明,該系統(tǒng)具有很好的性能,其中恒流驅(qū)動(dòng)和恒功率驅(qū)動(dòng)長(zhǎng)時(shí)間穩(wěn)定性達(dá)到10-4量級(jí),溫度控制偏差為0.03℃。同時(shí)該系統(tǒng)也適用于半導(dǎo)體激光器、LED等半導(dǎo)體光源的驅(qū)動(dòng)與測(cè)量。