
1 引言
可充電蓄電池是一種最成熟、最常用的簡單電源裝置,常用的蓄電池類型有鉛酸電池、鎳氫電池、鋰離子電池等,但他們普遍具有體積重量大、功率密度低、充電時(shí)間長、使用壽命短等缺點(diǎn)[1]-[3]。近年,超級電容器作為一種具有良好功率特性的新型儲能裝置受到了廣泛的關(guān)注和研究。與常用的蓄電池相比,超級電容器具有功率密度高、充放電速度快、效率高、循環(huán)壽命長等優(yōu)點(diǎn),但其能量密度低,一般不能單獨(dú)作為供電裝置來使用[4]。有相關(guān)研究將二者結(jié)合組成復(fù)合儲能系統(tǒng),這種復(fù)合電源性能的發(fā)揮,需要依靠合理可靠的控制裝置和能量管理方法。但這些儲能裝置都沒有能量獲取功能,不能為電源系統(tǒng)補(bǔ)充能量。在一些應(yīng)用場合,如移動機(jī)器人、智能傳感器節(jié)點(diǎn)等,要求電源有最大限度的持續(xù)工作能力。太陽能是環(huán)境中普遍可以被利用的一種能量,太陽能光電轉(zhuǎn)換及其控制技術(shù)已經(jīng)比較成熟,基于太陽能能量獲取的方式對很多應(yīng)用具有實(shí)際意義。
本文綜合考慮太陽能光伏電池、蓄電池和超級電容器構(gòu)成一種復(fù)合電源[5],研究了該復(fù)電源系統(tǒng)的開放式動態(tài)體系結(jié)構(gòu)、系統(tǒng)組成和設(shè)計(jì)方法,并將其應(yīng)用于移動機(jī)器人電源,取得了良好效果。
2 復(fù)合電源系統(tǒng)的體系結(jié)構(gòu)
由光伏電池、蓄電池和超級電容器組成的復(fù)合電源系統(tǒng)可能有多種結(jié)構(gòu)形式,最簡單的結(jié)構(gòu)就是將三者直接并聯(lián),但這樣太陽能不能被充分利用,蓄電池和超級電容器的特性也不能充分發(fā)揮。圖1 給出了本文采用的復(fù)合電源系統(tǒng)組成原理。在有光照的條件下,以太陽能為機(jī)器人能量的在線補(bǔ)充來源,蓄電池和超級電容器作為復(fù)合儲能裝置,可將多余的能量儲存起來以備光照不足時(shí)使用。太陽能電池板是一種受光照強(qiáng)度和環(huán)境溫度影的非線性直流電源,并且其輸出功率還隨外接負(fù)載的變化而變化,在相同光照強(qiáng)度和環(huán)境溫度的情況下,其輸功率的最大值只有在滿足特定負(fù)載條件時(shí)才會出現(xiàn)。為了最大限度地利用太陽能,將太陽能電池板通過最大功率跟蹤(MPPT) 控制器接入系統(tǒng)的直流母線。將蓄電池和超級電容器分別通過一個DC/DC 變換器接入直流母線,可實(shí)現(xiàn)對蓄電池和超級電容器輸出功率的主動控制,實(shí)現(xiàn)能量的管理。蓄電池是主儲能裝置,為了減少電能通過DC/DC 變換器時(shí)的功率損失,可不采用蓄電池和直流母線間的DC/DC 變換器,將蓄電池直接與直流母線相連。
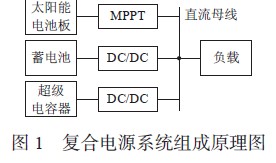
圖1 中給出的是一個完整的復(fù)合電源系統(tǒng)的組成結(jié)構(gòu),在不同的應(yīng)用中可根據(jù)實(shí)際需要進(jìn)行選擇和裁剪。圖中的負(fù)載不僅包括只消耗功率的傳統(tǒng)意義的負(fù)載,還代表可回饋功率的負(fù)載,如工作于再生制動狀態(tài)的電機(jī)。另外,負(fù)載的功率通常是動態(tài)變化的,太陽能電池板的輸出功率也是變化的,蓄電池和超級電容器有可能工作于放電狀態(tài)或充電狀態(tài)。因此,圖中的變換器一般采用雙向DC/DC 變換器。
采用一般的電源與負(fù)載的靜態(tài)模型已不能描述復(fù)合電源的動態(tài)特性,考慮能量的雙向流動,忽略具體的物理實(shí)現(xiàn),可抽象出圖1 中復(fù)合電源的動態(tài)體系結(jié)構(gòu)模型,如圖2 所示。
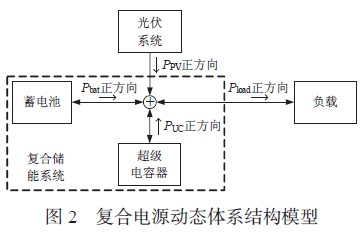
圖中的蓄電池和超級電容器組成復(fù)合儲能系統(tǒng),光伏系統(tǒng)只能單向輸出功率,蓄電池、超級電容器和負(fù)載都支持功率的雙向流動。PPV、Pbat、PUC 和Pload 分別表示光伏系統(tǒng)、蓄電池、超級電容器和負(fù)載當(dāng)前時(shí)刻的輸出或輸入功率,圖中的小箭頭指向分別規(guī)定了各功率的正方向。某一時(shí)刻各功率的方向和大小由電源系統(tǒng)的工作狀態(tài)決定。
3 復(fù)合電源系統(tǒng)的設(shè)計(jì)與控制方法
3.1 復(fù)合電源的硬件電路設(shè)計(jì)
結(jié)合該復(fù)合電源在移動機(jī)器人上的應(yīng)用,設(shè)計(jì)了復(fù)合電源的硬件電路。蓄電池直接與直流母線相連,圖1 中與超級電容器相連的DC/DC 變換器主電路采用Boost/Buck 型雙向升壓/ 降壓電路實(shí)現(xiàn),如圖3 所示。電路中,VH 端接直流母線,VL 端接超級電容器。當(dāng)MOS 管T2 關(guān)斷,T1 工作于開關(guān)狀態(tài),電路實(shí)現(xiàn)升壓功能,可使超級電容器放電;當(dāng)MOS 管T1 關(guān)斷,T2 工作于開關(guān)狀態(tài),電路實(shí)現(xiàn)降壓功能,可使超級電容器充電。T1 和T2 采用PWM 信號驅(qū)動。由于圖1 中的太陽能電池板只能輸出功率,且機(jī)器人所能安裝的太陽能電池板的輸出電壓不可能太高,因此,MPPT 變換器的主電路只采用單向Boost電路結(jié)構(gòu)(圖3 中電路除去T2 和D2 以外的部分),將電壓升高后再接直流母線。
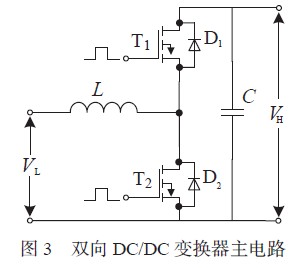
圖3 中雙向DC/DC 變換器的驅(qū)動電路采用專用的半橋驅(qū)動芯片IR2110,其可分別輸出半橋電路高端和低端的兩路驅(qū)動信號,結(jié)構(gòu)緊湊,外電路設(shè)計(jì)簡單。當(dāng)驅(qū)動低端MOS 管T2 時(shí),只需一路PWM 信號輸入IR2110 即可。當(dāng)驅(qū)動高端MOS 管T1 時(shí),需要控制器輸出一對互補(bǔ)對稱的PWM 信號給IR2110的輸入端,這是因?yàn)閷Ω叨藰虮鄣尿?qū)動是通過自舉方式實(shí)現(xiàn)的,低端MOS 管的互補(bǔ)導(dǎo)通才能實(shí)現(xiàn)對自舉電容的充電。
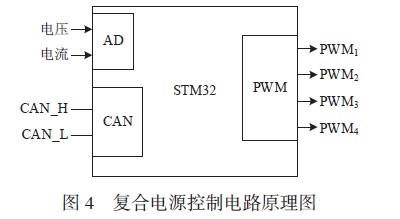
復(fù)合電源控制電路的CPU 采用意法半導(dǎo)體公司(ST) 的32 位微控制器STM32 芯片,其使用ARM 公司具有突破性的cortex-M3 內(nèi)核,具有功耗低、成本低、集成度高、外設(shè)豐富等優(yōu)點(diǎn),其集成了多路片上AD,具有多種通訊接口,且通過其內(nèi)部時(shí)鐘定時(shí)器可實(shí)現(xiàn)多路的PWM 信號輸出,方便實(shí)現(xiàn)開關(guān)電路的控制。本文基于STM32 芯片設(shè)計(jì)的復(fù)合電源控制器的原理如圖4 所示。片上AD 采集電源的電壓和電流信息,多路PWM 信號輸出驅(qū)動開關(guān)管,預(yù)留的CAN 總線接口方便與機(jī)器人的運(yùn)動控制器通訊。
3.2 復(fù)合電源的控制方法
復(fù)合電源系統(tǒng)能量的管理與分配,是通過對以上兩個DC/DC 變換器的控制實(shí)現(xiàn)的。控制方法設(shè)計(jì)時(shí),考慮負(fù)載優(yōu)先利用光伏電池的輸出功率,不足的部分由復(fù)合儲能裝置補(bǔ)充。只要蓄電池仍有一定的容量空間,對光伏電池的控制則采用MPPT 方式,否則就關(guān)閉光伏電池的輸出,即本文對光伏電池的控制和其他部分的控制是完全解耦的。MPPT 控制有很多種實(shí)現(xiàn)方法[6],本文采用與文獻(xiàn)[7] 中類似的擾動觀察法,具體實(shí)現(xiàn)過程不再詳述。
在圖2 的復(fù)合電源動態(tài)體系結(jié)構(gòu)中,相對蓄電池- 超級電容器復(fù)合儲能系統(tǒng)而言,可將光伏電池輸出功率的變化等效為驅(qū)動負(fù)載功率的變化,即將光伏系統(tǒng)和機(jī)器人的驅(qū)動負(fù)載視為復(fù)合儲能系統(tǒng)的等效負(fù)載,可使復(fù)合電源控制方法的分析得到簡化。可見,本文所提出圖2 中的復(fù)合電源體系結(jié)構(gòu)是一個可裁剪、可重組的動態(tài)體系結(jié)構(gòu),對復(fù)合電源控制方法的分析起著重要作用。由圖2 中的功率關(guān)系可知

式中: 為復(fù)合儲能系統(tǒng)的等效負(fù)載功率。根據(jù)以上的分析,對與超級電容器相連的雙向DC/DC 變換器,采用如下基于邏輯門限的控制方法。
為復(fù)合儲能系統(tǒng)的等效負(fù)載功率。根據(jù)以上的分析,對與超級電容器相連的雙向DC/DC 變換器,采用如下基于邏輯門限的控制方法。
(1)等效負(fù)載功率 即復(fù)合儲能系統(tǒng)放電。此種情況下的功率分配規(guī)則為:如果
即復(fù)合儲能系統(tǒng)放電。此種情況下的功率分配規(guī)則為:如果
 否則,當(dāng)超級電容器電量充足時(shí)有
否則,當(dāng)超級電容器電量充足時(shí)有 若此時(shí)超級電容器已欠電,則只能由電池單獨(dú)提供功率,這是一種非正常工作狀態(tài),說明電源系統(tǒng)已不能提供足夠的功率。
若此時(shí)超級電容器已欠電,則只能由電池單獨(dú)提供功率,這是一種非正常工作狀態(tài),說明電源系統(tǒng)已不能提供足夠的功率。
(2)等效負(fù)載功率 即復(fù)合儲能系統(tǒng)充電。此種情況下的功率分配規(guī)則為:只要超級電容器的電量達(dá)到最高限值
即復(fù)合儲能系統(tǒng)充電。此種情況下的功率分配規(guī)則為:只要超級電容器的電量達(dá)到最高限值

以上各式中, 表示蓄電池最大允許放電功率,
表示蓄電池最大允許放電功率, 和PUC 分別表示分配給蓄電池和超級電容器的功率。基于該規(guī)則實(shí)現(xiàn)的軟件程序流程如圖5 所示。在程序設(shè)計(jì)時(shí),為避免系統(tǒng)在邏輯門限值切換時(shí)出現(xiàn)振蕩,在各邏輯門限值附近均設(shè)置了一定的滯環(huán)寬度。
和PUC 分別表示分配給蓄電池和超級電容器的功率。基于該規(guī)則實(shí)現(xiàn)的軟件程序流程如圖5 所示。在程序設(shè)計(jì)時(shí),為避免系統(tǒng)在邏輯門限值切換時(shí)出現(xiàn)振蕩,在各邏輯門限值附近均設(shè)置了一定的滯環(huán)寬度。
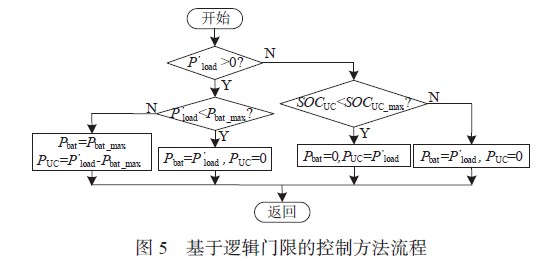
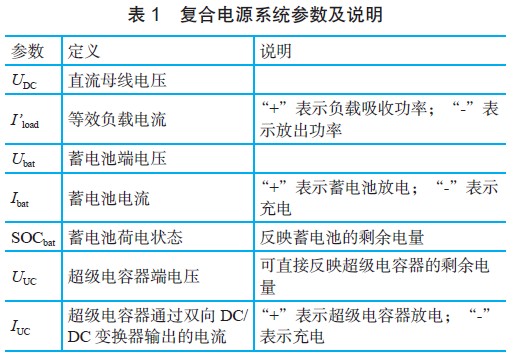
表1 給出了復(fù)合電源系統(tǒng)需要檢測或計(jì)算的參數(shù),這些參數(shù)是對雙向DC/DC 變換器進(jìn)行控制的依據(jù)。
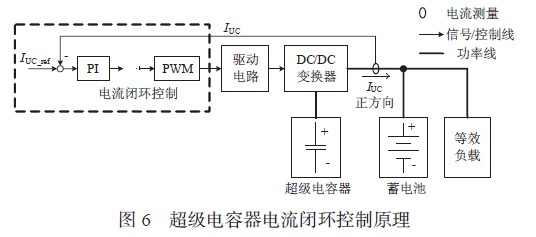
從以上分析的功率關(guān)系除以當(dāng)時(shí)的母線電壓,即可得到超級電容器需要輸出電流的給定值IUC_ref,采用電流閉環(huán)的PI調(diào)節(jié)器控制DC/DC 變換器的輸出電流IUC 及時(shí)跟蹤IUC_ref,即可實(shí)現(xiàn)等效負(fù)載電流在蓄電池和超級電容器間的分配。
3.3 模型仿真
在Matlab 環(huán)境下建立了移動機(jī)器人復(fù)合電源系統(tǒng)的仿真模型。復(fù)合電源中的光伏電池及MPPT 控制系統(tǒng)采用一個受控直流電流源來模擬,蓄電池采用Simpowersystems 中的battery 模型,超級電容器采用RC 串聯(lián)模型。負(fù)載為電機(jī),用一個直流電機(jī)模型模擬。模型的主要參數(shù)如下:蓄電池采用額定電壓為14.4V 的Li-ion 電池模型,容量為1.5Ah;超級電容器容量為15F。為了進(jìn)行對比研究,對單一蓄電池模型也進(jìn)行了仿真。設(shè)計(jì)了一個時(shí)間為25s 的機(jī)器人工作循環(huán),仿真過程模擬了機(jī)器人負(fù)載電流的動態(tài)變化,在該工作循環(huán)下分別對單一蓄電池電源和復(fù)合電源模型進(jìn)行了仿真,圖7 給出了仿真結(jié)果對比。
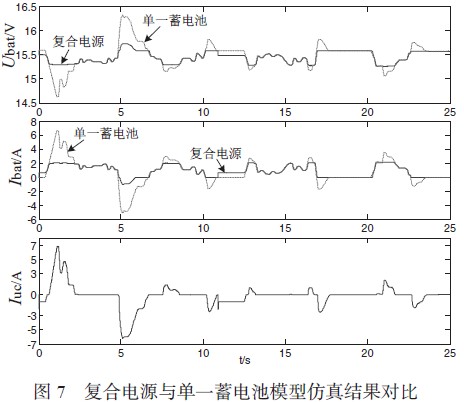
圖7 中的蓄電池端電壓(Ubat) 和充放電電流(Ibat) 曲線顯示出:采用單一蓄電池電源時(shí),Ubat 和Ibat 的波動很頻繁,Ubat 最大波動幅度可達(dá)2.5V,充電和放電峰值電流高達(dá)5A 和7A。蓄電池端電壓的急劇上升和跌落,是由過大的充電和放電峰值電流造成的,這對蓄電池有很大的損害,且電源電壓的過大波動容易造成機(jī)器人工作不穩(wěn)定;而采用復(fù)合電源時(shí),Ubat和Ibat 都得到了有效地平滑,蓄電池的充電和放電電流都被限制在了2A 以內(nèi)。由超級電容器電流曲線IUC 可以看出,復(fù)合電源中,超級電容器對負(fù)載的峰值電流進(jìn)行了及時(shí)的補(bǔ)充或吸收,從而避免了蓄電池受到過大充放電電流的沖擊,且負(fù)載回饋的電流基本全部被超級電容器吸收。復(fù)合電源中蓄電池得到了有效的保護(hù),仿真結(jié)果說明了移動機(jī)器人采用復(fù)合電源的優(yōu)越性。
4 復(fù)合電源在移動機(jī)器人上的應(yīng)用實(shí)驗(yàn)
將本文復(fù)合電源應(yīng)用于移動機(jī)器人設(shè)計(jì)了實(shí)驗(yàn)樣機(jī),見圖8。復(fù)合電源中的蓄電池選用額定電壓14.4V 的Li-ion 電池,容量為1.5Ah。超級電容器采用6 個額定電壓2.7V、容量120F 的單體電容串聯(lián)構(gòu)成。所用光伏電池的最大輸出功率為5W。復(fù)合電源的控制算法通過STM32 的軟件實(shí)現(xiàn)。

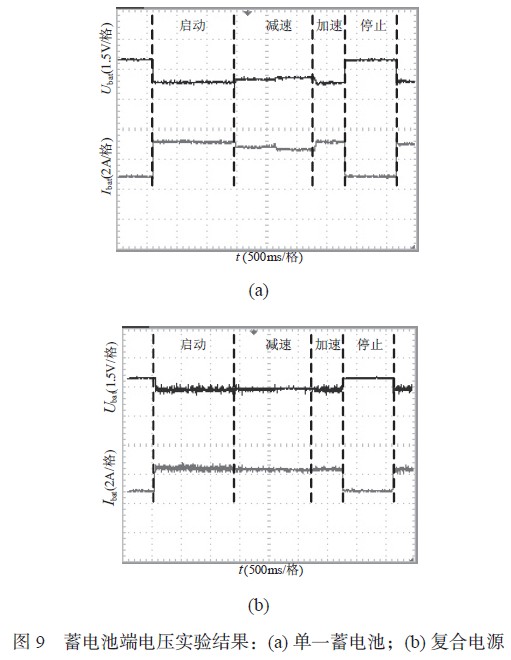
針對相同的工作循環(huán)過程,對采用單一蓄電池電源和復(fù)合電源的機(jī)器人分別進(jìn)行了實(shí)驗(yàn)。該循環(huán)過程包括:機(jī)器人啟動、加速、減速等工作過程,圖9 為兩種條件下蓄電池端電壓變化實(shí)驗(yàn)結(jié)果。由圖可知,若采用單一蓄電池,相對于空載時(shí)的電壓跌落最大值可達(dá)1.5V,且隨機(jī)器人工作狀態(tài)的改變波動明顯;若采用復(fù)合電源,蓄電池端電壓被保持在一定范圍內(nèi),受機(jī)器人工作狀態(tài)變化的影響很小,最大跌落電壓0.5V 左右。而蓄電池端電壓的波動和跌落是由其電流變化引起的,圖9 的結(jié)果說明超級電容器對過大的負(fù)載電流提供了有效補(bǔ)充,減輕了對蓄電池的損害。實(shí)驗(yàn)結(jié)果與模型仿真的結(jié)果一致。
5 結(jié)論
本文研究了光伏電池- 蓄電池- 超級電容器復(fù)合電源系統(tǒng)體系結(jié)構(gòu)和設(shè)計(jì)方法。利用復(fù)合電源的動態(tài)體系結(jié)構(gòu)模型的開放性和可重組性,在復(fù)合電源控制方法的設(shè)計(jì)過程中采用了相互等效的思想,使設(shè)計(jì)得到了解耦和簡化。在此基礎(chǔ)上針對該復(fù)合電源在移動機(jī)器人上的應(yīng)用進(jìn)行了系統(tǒng)設(shè)計(jì)和模型仿真,并設(shè)計(jì)了移動機(jī)器人復(fù)合電源系統(tǒng)實(shí)驗(yàn)樣機(jī)。實(shí)驗(yàn)結(jié)果與仿真結(jié)果一致,說明了本文復(fù)合電源設(shè)計(jì)方法的可行性,也驗(yàn)證了移動機(jī)器人采用復(fù)合電源的優(yōu)越性。在保證機(jī)器人動力性能的基礎(chǔ)上,超級電容器對蓄電池電流起到了良好的補(bǔ)充和平滑作用,可延長蓄電池的使用壽命,并可利用周圍環(huán)境的太陽能為機(jī)器人在線獲得能量補(bǔ)充,提高機(jī)器人的持續(xù)工作能力。