
嵌入式低功耗射頻/紅外轉(zhuǎn)換控制器的開(kāi)發(fā)
來(lái)源:中國(guó)電子設(shè)計(jì)網(wǎng)
摘要: 本文就基于Msp430的低功耗RF/紅外控制器的設(shè)計(jì)與實(shí)現(xiàn)進(jìn)行介紹。
Abstract:
Key words :
0 引言
在智能化家居控制系統(tǒng)應(yīng)用中,無(wú)線通信和控制已經(jīng)越來(lái)越廣泛地被運(yùn)用。為了實(shí)現(xiàn)對(duì)居室電器設(shè)備的集中無(wú)線控制,可采用電話遙控、手持遙控器進(jìn)行遠(yuǎn)程或短距離的無(wú)線控制,但所控制和傳輸?shù)男盘?hào)都是RF信號(hào)。然而有些被控對(duì)象本身是用紅外信號(hào)遙控的,例如電視機(jī)、空調(diào),由于各種品牌的空調(diào)都有自己的紅外編碼信號(hào),相互不能通用,這就給智能化家居控制系統(tǒng)中紅外遙控器的集中無(wú)線控制帶來(lái)了極大的不便。本文就基于Msp430的低功耗RF/紅外控制器的設(shè)計(jì)與實(shí)現(xiàn)進(jìn)行介紹。
1 工作原理
大多數(shù)紅外遙控信號(hào)的輸出都是用編碼后串行數(shù)據(jù)對(duì)38~40KHz的方波進(jìn)行脈沖幅度調(diào)制而產(chǎn)生的PWM信號(hào),如圖1所示。各種品牌的紅外遙控器的編碼信號(hào)互不兼容。
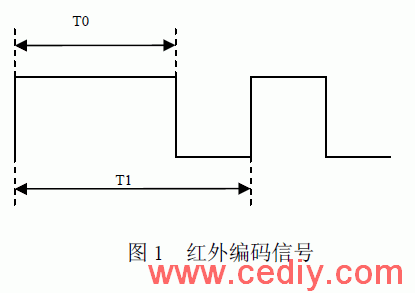
對(duì)該波形進(jìn)行測(cè)量,并將高低電平的寬度存于 Flash中,而不管其如何編碼。當(dāng)需要對(duì)遠(yuǎn)端的紅外設(shè)備進(jìn)行無(wú)線控制時(shí),在內(nèi)存中取出該數(shù)字序列,經(jīng)Msp430單片機(jī)中的捕獲比較功能模塊,將其還原成紅外編碼信號(hào)。為了實(shí)現(xiàn)無(wú)線傳輸,將該信號(hào)調(diào)制到 350MHz或 420MHz的無(wú)線電波上進(jìn)行傳送。
由于紅外編碼信號(hào)的頻率只有幾十K左右,而無(wú)線載波的頻率是350MHz,以上變換的誤差很小。而防止產(chǎn)生誤動(dòng)作的關(guān)鍵是脈沖函數(shù)的寬度的選取。采樣頻率越高,誤差就越小,但內(nèi)存的用量就越大。本文選取采樣頻率為紅外基波頻率(20KHz)的6倍 [6][7]。
接收端的電路先將收到的調(diào)制信號(hào)解調(diào),得到與圖1相似的紅外波形,該信號(hào)通過(guò)紅外驅(qū)動(dòng)電路將驅(qū)動(dòng)紅外發(fā)光兩極管,就可以得到遙控發(fā)射信號(hào),完成要求的控制動(dòng)作。只要解調(diào)信號(hào)和實(shí)際的紅外波形有很好的一致性,就能夠正確的實(shí)現(xiàn)紅外遙控。
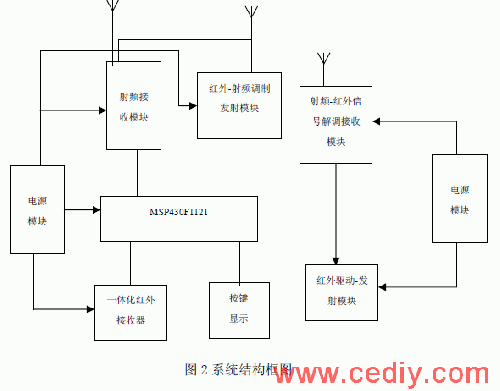
2 系統(tǒng)的硬件結(jié)構(gòu)
本控制器分主控制器和接收節(jié)點(diǎn)兩個(gè)部分。如圖 2所示。
1)電源模塊
電源模塊的主要功能是實(shí)現(xiàn)電壓的轉(zhuǎn)換。把220V的交流電轉(zhuǎn)換成數(shù)字電路工作所需要的3V和6V的直流電,其中3V是主要供單片機(jī)所使用的,6V供給紅外一體化接收頭和RF發(fā)射、接收模塊使用的。此系統(tǒng)的電源回路設(shè)計(jì)采用無(wú)變壓器的有源電路,它主要由一些電容、電阻、二極管、穩(wěn)壓管等組成,可達(dá)到體積小,耗電少、經(jīng)濟(jì)實(shí)用、性能穩(wěn)定可靠的指標(biāo)。
2)控制器模塊
控制器模塊以MSP430F1121 單片機(jī)為控制器,它的主要功能是完成與其它模塊的接口,控制和協(xié)調(diào)各模塊的工作。MSP430是TI公司推出的16位系列單片機(jī),它具有4kB+256字節(jié)的FLASH ROM和256字節(jié)的RAM的存儲(chǔ)空間。因此,在整個(gè)硬件電路上無(wú)須外加程序存儲(chǔ)器。在電池供電的低功耗應(yīng)用中具有獨(dú)特的優(yōu)勢(shì),其工作電壓在1.8-3.6V之間,正常工作時(shí)功耗可控制在200μA左右,低功耗模式可實(shí)現(xiàn)2μA甚至0.1μA的低功耗。當(dāng)單片機(jī)處于閑置狀態(tài)時(shí),可以讓其處于睡眠狀態(tài)以降低供耗,可供選擇的有6種模式:活動(dòng)方式(AM)和低功耗方式(LM0,LM1,LM2,LM3,LM4),低功耗方式可讓其最低功耗幾乎為零。
3)紅外自學(xué)習(xí)模塊
紅外自學(xué)習(xí)模塊的主要功能是能夠?qū)W習(xí)并記錄各種格式紅外編碼波形,常規(guī)的方法是將各種型號(hào)的紅外編碼存于一個(gè)表中,但這需要海量存儲(chǔ)器。本模塊由MSP430單片機(jī)內(nèi)的捕獲/比較功能模塊、紅外一體化接收頭,2個(gè)開(kāi)關(guān),一個(gè)為自學(xué)習(xí)開(kāi)關(guān),另一個(gè)為復(fù)位開(kāi)關(guān),以及指示用的LED組成。
圖3 是捕獲比較模塊的結(jié)構(gòu)框圖[5]。捕獲比較模塊用于捕獲應(yīng)用事件的發(fā)生時(shí)間,或產(chǎn)生定時(shí)間隔。利用Timer_Ad定時(shí)器的捕獲功能,將CCTL1中的模式位CAP置位,并選定任意跳變的脈沖觸發(fā)模式,當(dāng)被測(cè)的紅外波形產(chǎn)生上升沿或下降沿時(shí),定時(shí)器計(jì)數(shù)值將被復(fù)制到捕獲寄存器CCR1中。相鄰兩次跳變時(shí)所記錄的定時(shí)器計(jì)數(shù)值之差就是高電平或低電平的持續(xù)時(shí)間。將每個(gè)時(shí)間值保存在FLASH中,就是將紅外編碼波形完整的記錄下來(lái)。由于是波形的復(fù)制,可以避免由于廠家不同,紅外遙控器發(fā)出的紅外編碼信號(hào)不統(tǒng)一而帶來(lái)的麻煩。由于每發(fā)生一次捕獲,捕獲/比較模塊寄存器將產(chǎn)生中斷,因此程序能方便的判斷紅外波形是否結(jié)束。另外,捕獲/比較模塊中的輸出單元可根據(jù)定時(shí)器計(jì)數(shù)到CCRx和CCR0時(shí),輸出PWM波形。
紅外自學(xué)習(xí)模塊的主要功能是能夠?qū)W習(xí)并記錄各種格式紅外編碼波形,常規(guī)的方法是將各種型號(hào)的紅外編碼存于一個(gè)表中,但這需要海量存儲(chǔ)器。本模塊由MSP430單片機(jī)內(nèi)的捕獲/比較功能模塊、紅外一體化接收頭,2個(gè)開(kāi)關(guān),一個(gè)為自學(xué)習(xí)開(kāi)關(guān),另一個(gè)為復(fù)位開(kāi)關(guān),以及指示用的LED組成。
圖3 是捕獲比較模塊的結(jié)構(gòu)框圖[5]。捕獲比較模塊用于捕獲應(yīng)用事件的發(fā)生時(shí)間,或產(chǎn)生定時(shí)間隔。利用Timer_Ad定時(shí)器的捕獲功能,將CCTL1中的模式位CAP置位,并選定任意跳變的脈沖觸發(fā)模式,當(dāng)被測(cè)的紅外波形產(chǎn)生上升沿或下降沿時(shí),定時(shí)器計(jì)數(shù)值將被復(fù)制到捕獲寄存器CCR1中。相鄰兩次跳變時(shí)所記錄的定時(shí)器計(jì)數(shù)值之差就是高電平或低電平的持續(xù)時(shí)間。將每個(gè)時(shí)間值保存在FLASH中,就是將紅外編碼波形完整的記錄下來(lái)。由于是波形的復(fù)制,可以避免由于廠家不同,紅外遙控器發(fā)出的紅外編碼信號(hào)不統(tǒng)一而帶來(lái)的麻煩。由于每發(fā)生一次捕獲,捕獲/比較模塊寄存器將產(chǎn)生中斷,因此程序能方便的判斷紅外波形是否結(jié)束。另外,捕獲/比較模塊中的輸出單元可根據(jù)定時(shí)器計(jì)數(shù)到CCRx和CCR0時(shí),輸出PWM波形。
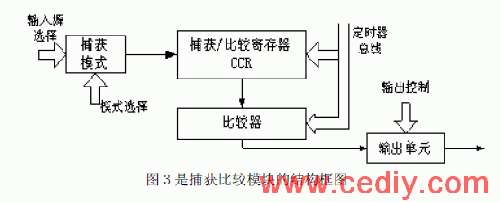
由于MSP430具有高穩(wěn)定度的時(shí)鐘,所以所捕獲的紅外編碼有較精確的波形,能夠準(zhǔn)確地復(fù)現(xiàn)紅外編碼信號(hào),實(shí)現(xiàn)紅外編碼的自學(xué)習(xí)和存儲(chǔ),以供紅外-射頻調(diào)制模塊的使用。
4)紅外-射頻調(diào)制發(fā)射模塊和射頻-紅外解調(diào)模塊
該模塊將事先存儲(chǔ)在FLASH中代表紅外編碼波形高低電平的時(shí)間值,放入CCRx和CCR0作為定時(shí)器計(jì)數(shù)值,當(dāng)定時(shí)器計(jì)數(shù)到CCRx和CCR0時(shí),捕獲/ 比較模塊中的輸出單元輸出PWM波形,通過(guò)無(wú)線發(fā)射模塊,將該P(yáng)WM信號(hào)攜載在315MHz的載波上發(fā)射出去。無(wú)線發(fā)射模塊采用ASK調(diào)制,其工作頻率為315MHz,采用聲表諧振器SAW,頻率穩(wěn)定度較高。
接收模塊采用315MHz的超外差接收模塊, 其優(yōu)點(diǎn)是頻率穩(wěn)定,抗干擾能力好,和單片機(jī)配合時(shí)性能比較穩(wěn)定,缺點(diǎn)是靈敏度比較低。通過(guò)該模塊,將接收到的ASK信號(hào)解調(diào)成PWM信號(hào),該信號(hào)就是紅外編碼信號(hào),故通過(guò)紅外驅(qū)動(dòng)-發(fā)射模塊將驅(qū)動(dòng)紅外發(fā)光兩極管,就可以得到遙控發(fā)射信號(hào),完成要求的控制動(dòng)作。
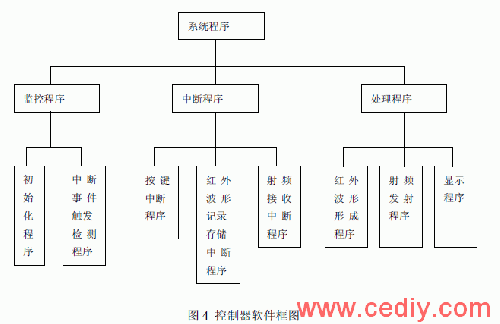
3 系統(tǒng)的軟件設(shè)計(jì)
系統(tǒng)軟件設(shè)計(jì)主要包括監(jiān)控程序、中斷程序以及數(shù)據(jù)處理程序等。流程圖見(jiàn)圖4。監(jiān)控程序 主要完成 P1 P2口各位的輸入、輸出引腳定義,中斷設(shè)置,定時(shí)器捕獲模式設(shè)定等系統(tǒng)初始化,等初始化程序結(jié)束后,設(shè)定 MSP430F413工作在低功耗模式LPM4, 使 CPU處于休眠狀態(tài),其能耗最低(0.1μA)。由于P1 、P2口具有中斷功能,能夠?qū)崟r(shí)的捕捉觸發(fā)事件,P2.1和P2.2口線連接紅外學(xué)習(xí)開(kāi)關(guān),P2.3連接復(fù)位開(kāi)關(guān)。P1.0和 P1.1口線連接RF接收模塊,P1.2線則接收來(lái)自紅外一體化接收頭的信號(hào),P1.3口線發(fā)射紅外信號(hào),當(dāng)其中任何一個(gè)引腳收到跳變信號(hào)時(shí),就觸發(fā)一個(gè)中斷事件將系統(tǒng)從休眠中喚醒,這樣使得系統(tǒng)的用電大大的節(jié)約下來(lái)。
開(kāi)發(fā)工具選擇TI公司的MSP430系列單片機(jī)配套的IAR Embebbed Workbench 集成軟件開(kāi)發(fā)系統(tǒng),它可以通過(guò)仿真器對(duì)目標(biāo)系統(tǒng)實(shí)現(xiàn)在線編程,將程序通過(guò)仿真器寫(xiě)到單片機(jī)中實(shí)時(shí)的運(yùn)行,設(shè)置斷點(diǎn)等調(diào)試,通過(guò)強(qiáng)大的調(diào)試窗口功能可觀察分析運(yùn)行結(jié)果。
開(kāi)發(fā)工具選擇TI公司的MSP430系列單片機(jī)配套的IAR Embebbed Workbench 集成軟件開(kāi)發(fā)系統(tǒng),它可以通過(guò)仿真器對(duì)目標(biāo)系統(tǒng)實(shí)現(xiàn)在線編程,將程序通過(guò)仿真器寫(xiě)到單片機(jī)中實(shí)時(shí)的運(yùn)行,設(shè)置斷點(diǎn)等調(diào)試,通過(guò)強(qiáng)大的調(diào)試窗口功能可觀察分析運(yùn)行結(jié)果。
4.結(jié)束語(yǔ)
應(yīng)用本文的設(shè)計(jì)思想和方法,可以較好地實(shí)現(xiàn)用無(wú)線信號(hào)對(duì)原紅外遙控設(shè)備的控制,該控制器在實(shí)際應(yīng)用中已經(jīng)得到較好的驗(yàn)證,具有精度高、控制準(zhǔn)確、抗干擾性強(qiáng)等特點(diǎn)。為智能化家居控制系統(tǒng)中紅外遙控設(shè)備的集中無(wú)線控制提供了一套可行方案。本文作者創(chuàng)新點(diǎn):
1 對(duì)紅外編碼信號(hào)的波形進(jìn)行測(cè)量,并將高低電平的寬度存于 Flash中,而不管其如何編碼,可實(shí)現(xiàn)各種型號(hào)紅外遙控器的自學(xué)習(xí)。
2 將紅外信號(hào)調(diào)制在射頻信號(hào)上,可解決紅外信號(hào)傳播的方向性缺點(diǎn)以及不能穿墻的問(wèn)題,實(shí)現(xiàn)遠(yuǎn)距離的無(wú)線控制
3 超低功耗的系統(tǒng)設(shè)計(jì)方法對(duì)于功耗敏感的應(yīng)用提供了一種很好的解決方案。
此內(nèi)容為AET網(wǎng)站原創(chuàng),未經(jīng)授權(quán)禁止轉(zhuǎn)載。