
摘要:為了滿足CNC齒輪測量中心的測量精要求,針對定點數(shù)字信號處理器(DSP)TMS320LF2407A的特點,設計一種以DSP運動控制為核心的運動控制系統(tǒng)。該系統(tǒng)通過DSP內部集成的A/D轉換模塊對傳感器電壓值進行采樣,由DSP控制給出指令,驅動電機運動,實現(xiàn)了位置控制,測量精度大大提高。并給出系統(tǒng)硬件電路設計。根據(jù)實際情況,給出CAMAC接口電路設計。
關鍵詞:CNC;DSP;硬件組成;CAMAC;TMS320LF2407A
隨著工業(yè)中對運動控制的速度和精度要求越來越高,一般運動控制系統(tǒng)難以取得滿意的控制效果。當前的數(shù)字電機控制系統(tǒng)中,大多采用單片機控制,由于單片機的結構和復雜的指令系統(tǒng)存在運算速度較慢,處理能力有限等問題。因此,單片機不能滿足那些實時性和精度要求較高的控制場合。結合CNC齒輪測量中心,這里提出一種基于DSP的運動控制系統(tǒng)。該系統(tǒng)設計是以TMS320LF2407A型DSP為控制核心,采用“PC+CPLD+DSP”方案,實現(xiàn)電機的位置控制。
1 運動控制系統(tǒng)組成
圖l為基于CNC齒輪測量中心的運動控制系統(tǒng)原理框圖,它主要由CAMAC接口電路、信號采集、DSP外圍電路和電機驅動等4部分組成。
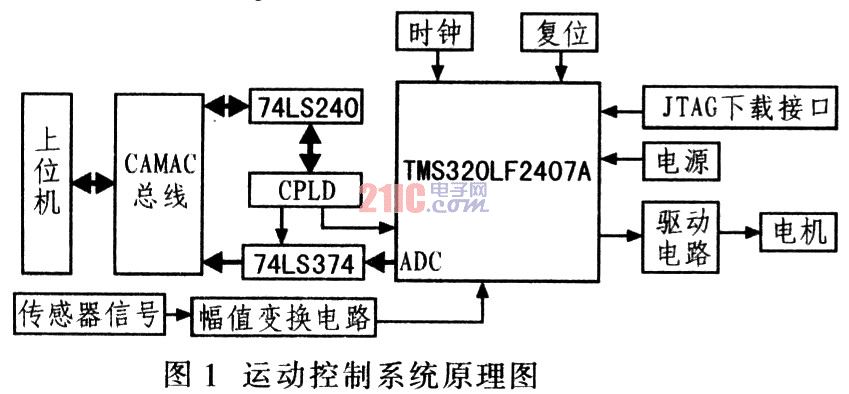
上位機發(fā)送指令給以TMS320LF2407A型DSP為核心的控制系統(tǒng),DSP以中斷方式接收控制指令和參數(shù),傳感器信號反應測頭與被測工件之間的位置偏差,該模擬信號經(jīng)幅值變換電路后,作為控制信號送至DSP的A/D轉換器。經(jīng)片內控制器處理后,輸出所接收到的控制指令和參數(shù),經(jīng)脈沖發(fā)生器和驅動放大電路送給步進電機,驅動電機執(zhí)行相應動作。從而該運動控制系統(tǒng)能夠精確測量被測工件。
2 系統(tǒng)硬件電路設計
2.1 DSP器件
選用的TMS320LF2407A型定點DSP,采用高性能靜態(tài)CMOS技術,供電電壓為3.3 V,使得控制器功耗降低。片內集成有高達32 K字的Flash程序存儲器,1.5 K字的數(shù)據(jù)/程序RAM,544字的雙口RAM和2 K字的單口RAM。執(zhí)行速度高達40 MI/s,提高控制器的實時控制能力。TMS3-20LF2407A具有2個時間管理模塊EVA和EVB,每個事件管理器有2個16位通用定時器,8個16位脈寬調制(PWM)輸出通道。該模塊可實現(xiàn)同步A/D轉換功能,高性能10位模數(shù)轉換器的轉換時間為375 ns,提供多達16路的模擬輸入,具有自動排序功能,1個TMS320LF2407A控制器可控制多個電機。
2.2 幅值變換電路
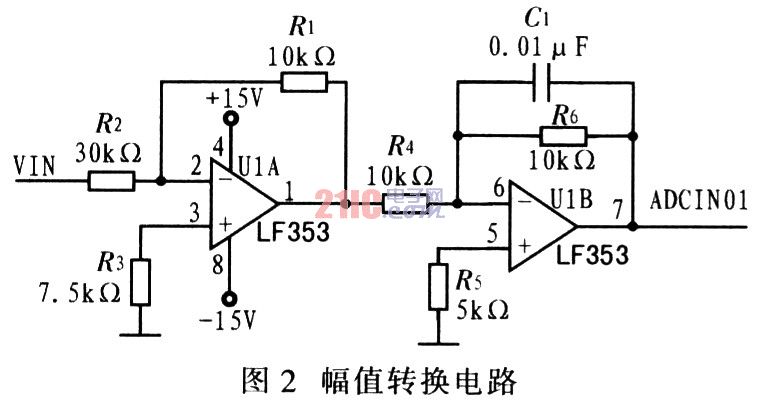
在基于TMS320LF2407A的CNC齒輪測量中心的運動控制系統(tǒng)中,A/D轉換器采集的信號是傳感器的電壓信號。傳感器輸出信號的范圍為0~10 V,但TMS320LF2407A的A/D轉換模塊接收模擬信號為0~3.3 V的電壓信號,為此,需對輸入A/D轉換器模塊的傳感器信號進行調理,轉換成適合A/D轉換模塊0~3.3 V的電壓信號,提供給DSP采樣。圖2為幅值轉換電路。VIN為傳感器輸出經(jīng)調理的O~10 V的電壓信號;ACDI-N01為經(jīng)過調理后輸出的0~3.3 V電壓信號(其中ACDIN01與DSP的ACDIN0l相連)。
2.3 JTAG邊界接口電路
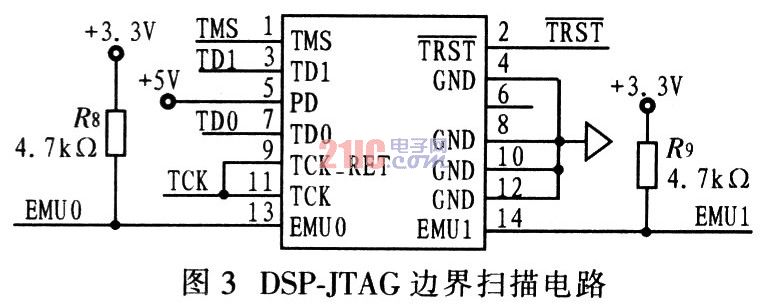
在對DSP系統(tǒng)硬件仿真時,通過JTAG邊界掃描接口在線監(jiān)控DSP內部數(shù)據(jù)存儲器、程序存儲器和控制寄存器,能在TMS320LF2407A的開發(fā)環(huán)境CCS中下載程序到DSP器件中并進行硬件仿真。JTAG是一個14針的接口,與TI公司的仿真器相連。JTAG接口與TMS320LF2407A的連接如圖3所示。其中EMU0和EMUl信號通過推薦的阻值為4.7 kΩ和10 kΩ的上拉電阻連接到3.3 V的電源,這樣可保證信號上升時間小于10 μS。
2.4 CAMAC接口電路
目前普遍采用微型或小型計算機及CPLD等作為CAMAC系統(tǒng)的控制元件,對于CAMAC,它是以儀器和接口為中心的系統(tǒng)組合,計算機和系統(tǒng)中的儀器設備都是通過接口掛在CAMAC總線上。它們之間無直接接口關系,當改換不同型號的計算機時,只需更換相應的接口即可,大大減少系統(tǒng)對計算機型號的依賴性和接口總數(shù),使CAMAC測控系統(tǒng)易于實現(xiàn)與各種新型計算機的連接。
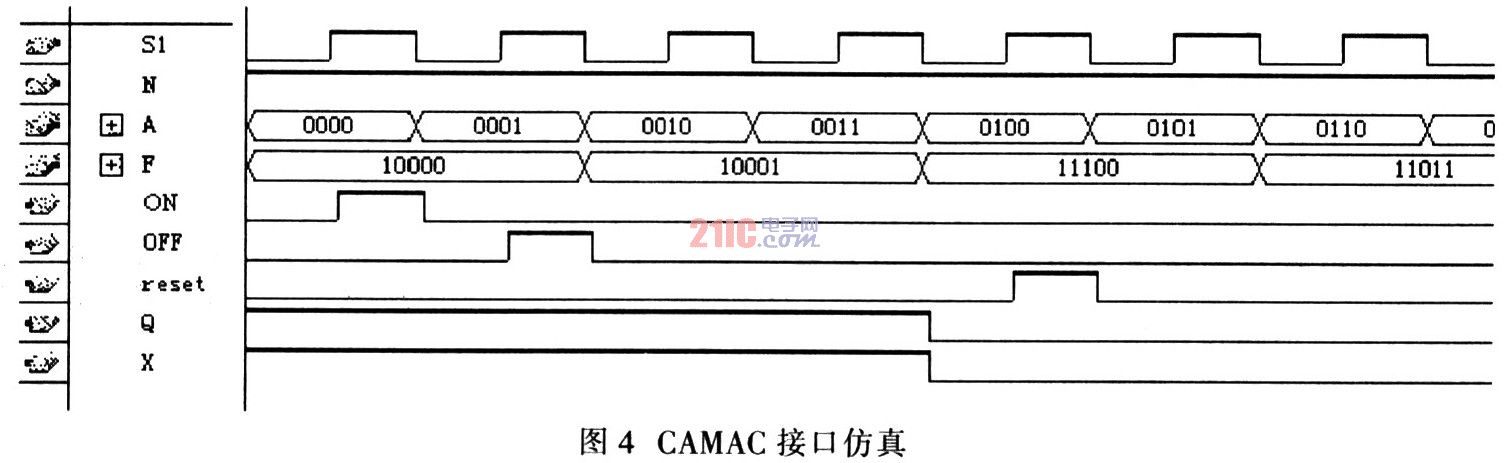
CAMAC接口電路完成邏輯極性轉換、接收總線信息,將N,A,F(xiàn)命令全譯碼,生成Q、L、X信號,并產生與總線相適應的輸出。CAMAC命令在CPLD中進行設計完成,不同的N,A,F(xiàn)信號組合成不同的CAMAC命令,當使用已設計的CAMAC指令時便在相應的輸出端產生高電平輸出。此信號就可用于控制信號,CAMAC接口仿真如圖4所示,從仿真圖中看出,設計完成的CAMAC指令正確。
3 結束語
本系統(tǒng)為CNC齒輪測量中的運動控制構造一個硬件平臺,將基于DSP的硬件平臺應用到CNC齒輪測量中心,通過DSP內部的控制算法提高齒輪測量中心的測量精度。DSP編寫軟件程序后,通過該平臺控制步進電機的運動,最終達到對位置精確控制的目的。高性能的TMS320LF2407A器件實現(xiàn)控制系統(tǒng)中的復雜控制算法,大大提高控制系統(tǒng)的控制精度,在實時性和精度要求較高的場合具有廣闊的應用前景。