
1引言
PWM整流器是應(yīng)用脈寬調(diào)制技術(shù)發(fā)展起來的一種新型電源變流器。其基本原理是通過控制功率開關(guān)管的通斷狀態(tài),使整流器輸入電流接近正弦波,并且電流和電壓同相位,從而消除大部分電流諧波并使功率因數(shù)接近于1。本文采用TI公司的TMS320F240DSP對整流器實現(xiàn)數(shù)字控制,這一方法相對于模擬控制具有以下優(yōu)點:
1)控制靈活在數(shù)字控制系統(tǒng)中,主要利用軟件算法實現(xiàn)控制方案,相比于模擬控制較靈活;
2)可靠性高微機系統(tǒng)由于采用元器件較少,信號全部采用數(shù)字處理,故受干擾小,可靠性高;
3)故障分析容易信號檢測將取得的信息寄存,具備記憶的能力,故容易實現(xiàn)故障診斷;
4)參數(shù)設(shè)定簡便可以使系統(tǒng)的調(diào)試工作變得很方便。
基于以上考慮,本文采用了以DSP為核心的數(shù)字控制系統(tǒng)實現(xiàn)對整流器的控制。
2TMS320F240的主要特點
TMS320F240是一款專門為電機控制而設(shè)計的DSP,因而,它不僅具有普通數(shù)字信號處理器的高速運算功能——20MIPS的處理能力,而且片內(nèi)還集成了豐富的外設(shè)功能模塊:雙10位A/D轉(zhuǎn)換器,28個可獨立編程的多路復(fù)用I/O引腳,帶有鎖相環(huán)的時鐘模塊,帶中斷的看門狗定時器模塊等。特別是F240片內(nèi)設(shè)置了一個事件管理器,可以提供12路比較/PWM通道,3個具有死區(qū)功能的全比較單元,3個單比較單元,3個16位通用定時器等,這一外設(shè)裝置大大簡化了用于產(chǎn)生同步脈寬調(diào)制PWM波形的控制軟件和外部硬件,只需很少的CPU干預(yù)即可產(chǎn)生所需的PWM波,因而特別適合于控制需要多個PWM輸出的裝置,如三相電機和整流器。
3PWM整流器主電路及控制方案
本文中主電路采用單相全橋結(jié)構(gòu),如圖1所示。

圖中uN(t)是輸入的電網(wǎng)正弦波電壓,Ud是輸出的恒定直流電壓,us(t)是PWM整流器的輸入端電壓,是PWM控制下的脈沖波,iN(t)是從電網(wǎng)輸入PWM整流器的電流,S1~S4是開關(guān)管,D1~D4是整流二極管。通過對四個開關(guān)管進行合適的PWM控制,就可以一方面保證輸出電壓Ud恒定,另一方面使輸入電流iN(t)與電網(wǎng)電壓uN(t)同相位,電流iN(t)的波形接近正弦波。本文所采用的控制方法為電流追蹤型控制,控制框圖如圖2所示。
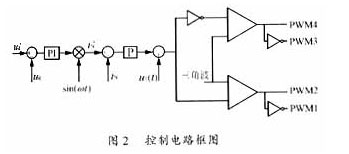
其具體控制原理簡述如下:輸出電壓采樣值(ud)與給定參考電壓(ud*)的偏差送入PI調(diào)節(jié)器,得到的值作為參考電流信號的幅值,乘以與電源電壓同相位的基準正弦信號〔sin(ωt)〕后,作為參考電流的值。從電感電路獲得輸入電流采樣值,其電流誤差信號送入比例調(diào)節(jié)器,輸出值再加上輸入電壓補償信號〔uT(t)〕后與三角載波進行比較,產(chǎn)生的調(diào)制波用于開關(guān)管的觸發(fā)信號。這樣,電流誤差放大器的輸出直接控制了PWM調(diào)制器的占空比,強迫實際輸入電流逼近參考電流的值。這種控制方法具有開關(guān)頻率固定,產(chǎn)生的噪聲小,開關(guān)損耗也較小,而且系統(tǒng)的動態(tài)性能也較好。
4控制系統(tǒng)的硬件設(shè)計
針對以上的控制方案,本文設(shè)計了以TMS320F240為核心的數(shù)字控制系統(tǒng),硬件框圖如圖3所示。從圖中可以看到,控制系統(tǒng)主要包括以下幾部分:CPU及其外圍電路,信號檢測與調(diào)理電路,驅(qū)動電路和保護電路。其中,信號檢測與調(diào)理單元主要完成強弱電隔離,電平轉(zhuǎn)換和信號放大及濾波等功能,以滿足DSP控制系統(tǒng)對各路信號電平范圍和信號質(zhì)量的要求。

電流檢測與調(diào)理單元電路如圖4所示。電流傳感器輸出電流信號經(jīng)測量電阻RM轉(zhuǎn)換為電壓信號后,由運算放大器U8構(gòu)成的放大器的增益與RM取值配合決定,可使輸出的雙極性信號恰好落在±5V范圍。運放U9構(gòu)成電平極性轉(zhuǎn)換級,把雙極性信號按比例轉(zhuǎn)換成單極性信號。單極性0~+5V信號是DSPA/D轉(zhuǎn)換所要求的,+5V電源由LM336構(gòu)成的基準電源供給。由RC構(gòu)成的簡單低通濾波器,來濾除交流輸入電流的開關(guān)頻率次諧波,兩個二極管為鉗位二極管。
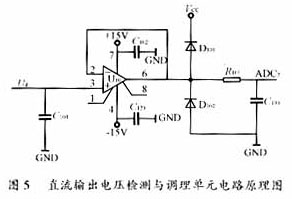
直流輸出電壓檢測與調(diào)理單元是直流側(cè)電壓閉環(huán)的前端傳感器,目的是測量直流側(cè)電容電壓,由于電容電壓含有一定的紋波,故需引入濾波環(huán)節(jié),電路原理如圖5所示。
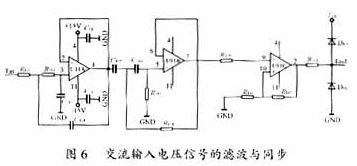
交流輸入電壓信號作為同步信號,由于從電網(wǎng)輸入的電壓信號往往不是純正弦波,為此,必須對其進行濾波才能準確檢測電網(wǎng)輸入電壓的相位,濾波器包括低通濾波器、高通濾波器兩部分。運放U11A及外圍阻容網(wǎng)絡(luò)組成二階低通濾波器。該低通濾波器可以濾去電網(wǎng)輸入信號中的高次諧波,使波形得到改善,但是又使相位產(chǎn)生了滯后,因此又引入高通濾波器進行補償。U11B及其外圍阻容網(wǎng)絡(luò)組成二階高通濾波器。從電路中可以看出,該高通、低通濾波器拓撲結(jié)構(gòu)完全相同,而且阻容對稱分布,只要各個參數(shù)選擇適當,高通濾波器超前的相位就正好可以抵消低通濾波器滯后的相位,結(jié)果經(jīng)兩次濾波后,不但濾去了諧波,波形接近正弦,而且沒有相位移。濾波以后再經(jīng)過過零回差電路,得出與電網(wǎng)輸入信號完全同步的方波信號,電路如圖6所示。
另外,對輸入電壓值檢測的不是電壓瞬時值而是有效值,因而采用了圖7所示的精密整流電路將濾波后的電壓信號轉(zhuǎn)換成對應(yīng)的直流值。

CPU及其外圍電路主要有時鐘電路,復(fù)位電路等。此外,為了調(diào)試的方便,本系統(tǒng)還擴展了一片16位RAM芯片來作為程序存儲器。驅(qū)動電路起到提高脈沖的驅(qū)動能力和隔離的作用。保護邏輯電路則保證當發(fā)生故障時,系統(tǒng)能從硬件上直接封鎖輸出脈沖信號。
5控制系統(tǒng)的軟件設(shè)計
本文中的控制系統(tǒng)軟件主要包括以下幾部分:
1)主程序主要完成系統(tǒng)的初始化和對系統(tǒng)中各個輸入量的循環(huán)檢測;
2)電流處理子程序主要完成控制系統(tǒng)中電流控制環(huán)的數(shù)據(jù)處理;
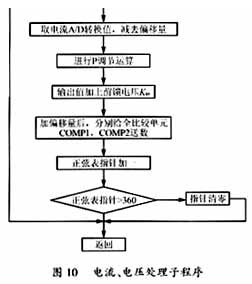
3)電壓處理子程序主要完成控制系統(tǒng)中電壓控制環(huán)的數(shù)據(jù)處理;
4)同步中斷子程序以同步信號為中斷源,置同步標志,使整個控制系統(tǒng)的軟件運行節(jié)奏與電網(wǎng)電壓保持一致;5)定時器中斷子程序這是整個程序中最核心的部分,根據(jù)各部分運算結(jié)果生成所需的PWM波。
軟件流程圖如圖8、9、10所示。


6實驗結(jié)果
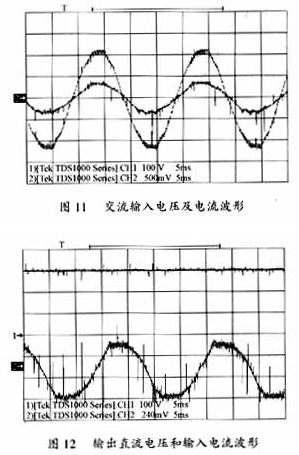
采用上述的方案,本文在實驗室中搭建了一個小功率的實驗裝置,其各部分參數(shù)如下:
輸入電壓交流170V
輸出電壓直流300V
輸出功率360W
各部分波形如圖11、12所示。
7結(jié)語
PWM整流器是一種新型的電源變流器,能使輸入的功率因數(shù)接近為1。本文采用電流追蹤型控制方法,設(shè)計了以高性能的DSP芯片TMS320F240為核心的數(shù)字控制系統(tǒng),并進行了小功率的實驗。最后,通過實驗證明該控制系統(tǒng)具有控制靈活,精度高,同時動態(tài)響應(yīng)好,所受干擾小等優(yōu)點。