
0 引言
鋁合金是重要的民用、戰(zhàn)略金屬材料,其力學性能與合金的晶粒尺寸和形態(tài)密切相關(guān)。但是未經(jīng)細化處理的結(jié)晶鋁合金晶粒粗大、柱狀晶發(fā)達、深拉性能差,嚴重影響其質(zhì)量。研究表明,在鑄造生產(chǎn)過程中,在鑄造區(qū)引入特殊的低頻復合電磁場,可有效地起到細化晶粒和改善鑄錠表面品質(zhì)的作用。
針對鋁電磁鑄造特殊復合磁場的控制要求,根據(jù)前期研究和設(shè)計的鋁電磁場快速鑄軋控制器在福建瑞閩鋁板帶廠的實際運行情況,本文研究和設(shè)計了基于DSP(TMS320F2808)+單片機(C8051F410)+CPLD(EPM7128)的復合磁場控制器。
1 系統(tǒng)總體設(shè)計
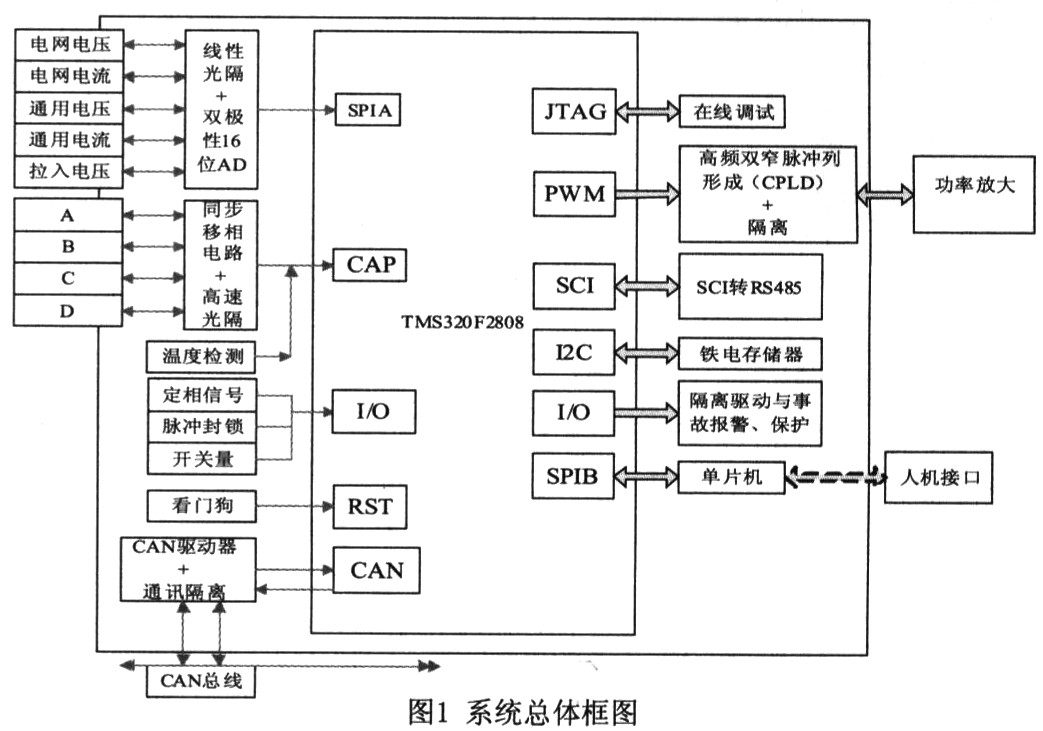
復合磁場控制系統(tǒng)以DSP(TMS320F2808)為主控制處理核心,以單片機為專用人機接口控制核心,DSP和單片機之間采用同步串行SPI接口進行通信;CPLD完成晶閘管觸發(fā)脈沖的形成,本文特別設(shè)計了采用高頻雙窄脈沖列的觸發(fā)方式;各模擬量的采集基于提高精度的考慮選用外擴雙極性16位的AD。系統(tǒng)總體框圖如圖1所示。
1.1 系統(tǒng)硬件設(shè)計
(1)系統(tǒng)主電路設(shè)計
產(chǎn)生特殊復合磁場的電磁感應(yīng)裝置是鋁電磁場半連續(xù)鑄造的關(guān)鍵技術(shù)之一。根據(jù)電磁半連續(xù)鑄造的特殊工藝要求,以及復合磁場感應(yīng)器的特殊結(jié)構(gòu),選取了交一交變頻方式作為復合磁場控制器的變頻方式,同時設(shè)計了有別于傳統(tǒng)交一交變頻方式的主電路結(jié)構(gòu),如圖2所示。
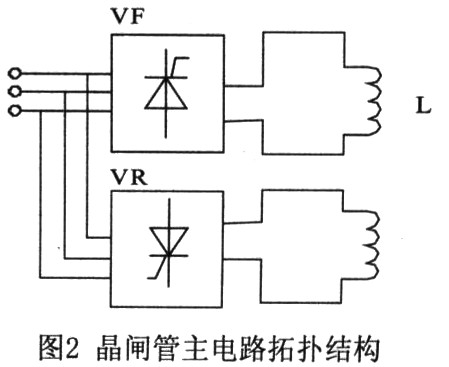
L、L'是電磁感應(yīng)裝置內(nèi)部環(huán)繞在同一個鐵心上的兩個負載線圈(注意兩者之間沒有電氣連接),VF組和VR組變流器均采用三相橋式全控整流。VF組工作時,線圈L中得到相應(yīng)的正半波電流,VR組工作時,線圈L'中得到相應(yīng)的負半波電流。在同一鐵心上將兩者疊加則相當于在負載線圈中引入了一個完整的電磁鑄造所需的特殊電流,從而最終獲得特殊的電磁場,達到控制目的。
(2)晶閘管觸發(fā)脈沖設(shè)計
針對現(xiàn)在普遍采用的雙窄脈沖驅(qū)動晶閘管的方法提出新的驅(qū)動方案,采用高頻雙窄脈沖列來代替普通的雙窄驅(qū)動脈沖,根據(jù)脈沖變壓器的能量傳輸理論,新方案傳輸能量效率更高,可以大大節(jié)省脈沖變壓器的體積。
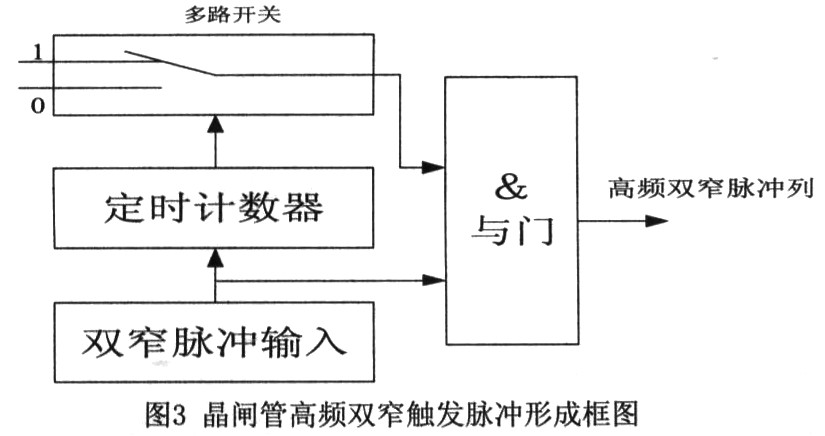
常規(guī)的高頻雙窄脈沖列產(chǎn)生方法為使用雙窄脈沖去控制一個高頻振蕩器的輸出來獲得高頻雙窄脈沖列,此方法存在高頻雙窄脈沖列和雙窄脈沖的脈沖前沿不一致的缺陷,從而會導致觸發(fā)角的不準確,這在大功率晶閘管的驅(qū)動控制中是需要改進的。本文設(shè)計在利用CPLD產(chǎn)生雙窄脈沖的同時,通過一定的處理,變成高頻雙窄脈沖列,經(jīng)仿真和實踐,取得明顯效果。高頻雙窄脈沖列形成的原理框圖如圖3所示。
(3)SCI轉(zhuǎn)RS485電路
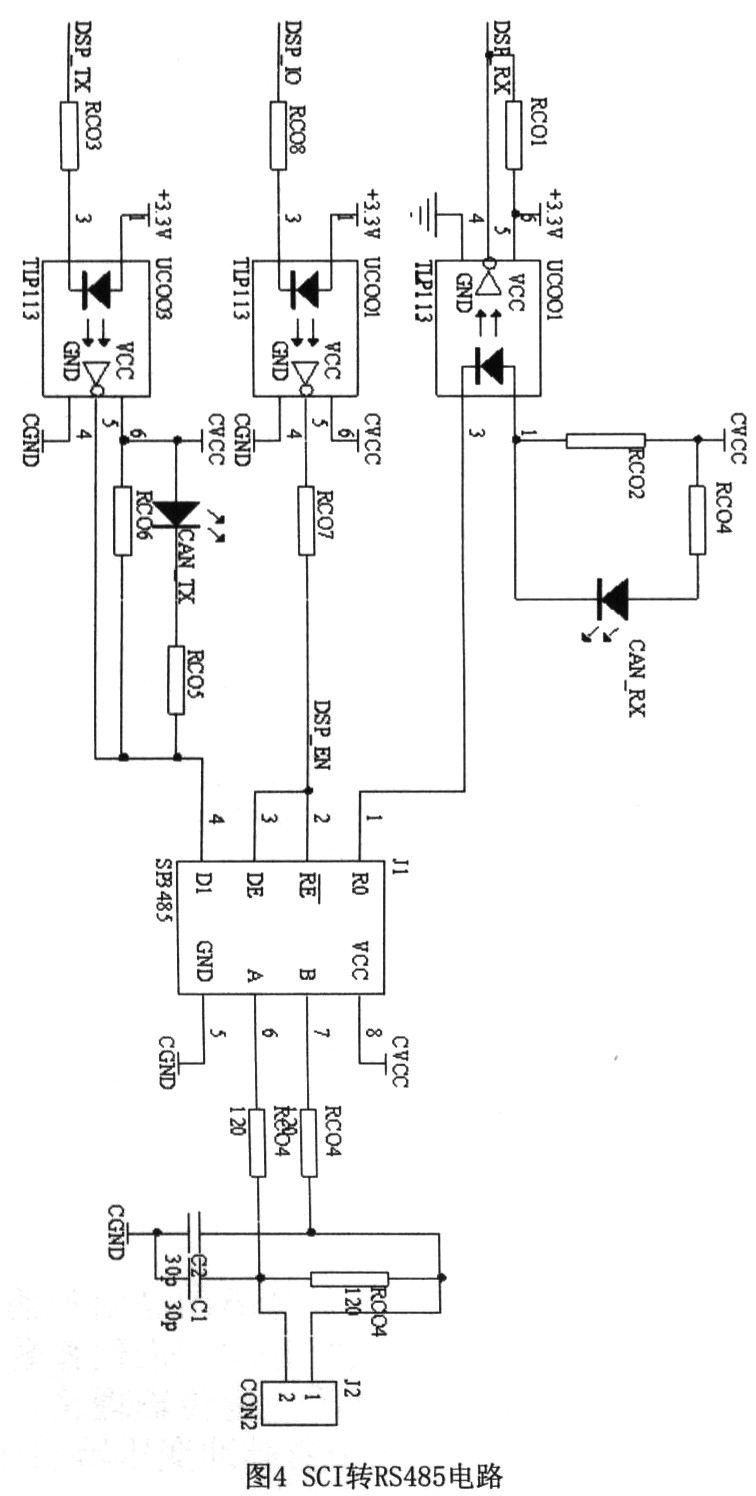
三路高速光電隔離(TLP113)是為了防止總線上的干擾信號竄入DSP控制器,提高系統(tǒng)通信的抗干擾能力。低功耗RS485半雙工收發(fā)器(SP3485)完成RS485通信接口電路。具體實現(xiàn)如圖4所示。圖中發(fā)光二極管用來顯示通信數(shù)據(jù)的發(fā)送和接收狀態(tài),RS485兩根輸出引線之間接一個120W的匹配電阻,并分別進行一階低通濾波。需要注意的是光隔離器兩端的電源和地要絕對地絕緣,實現(xiàn)真正的隔離。
(4)鐵電存儲和看門狗電路設(shè)計
鋁電磁鑄造復合磁場控制器涉及到一系列參數(shù)的設(shè)置和保存,并且可能經(jīng)常被重復修改,此外,現(xiàn)場工作環(huán)境惡劣,為了提高系統(tǒng)抗干擾能力,必須外設(shè)系統(tǒng)看門狗。鑒于上面原因,選擇具有集串行非易失性存儲器(鐵電存儲器--無限制的讀寫次數(shù),掉電數(shù)據(jù)保持10年)、實時時鐘/日歷、低電壓復位、看門狗、快速的二線制串行接口(I2C)于一體的元器件FM31256。具體電路如圖5所示。

在制作PCB板的時候,為了提高DSP和FM312561間通信的穩(wěn)定性和可靠性,兩者應(yīng)盡量靠近,I2C通信線盡可能短,并可考慮加一級低通濾波(100W,100p)。
(5)人機接口設(shè)計
人機接口處理采用專門的單片機進行管理,單片機與系統(tǒng)主控制核心DSP間采用SPI總線形式通信,編程簡單且實現(xiàn)容易。單片機主要完成鍵盤掃描(參數(shù)的設(shè)置等)、液晶顯示(運行檢測的參數(shù)顯示)功能。根據(jù)人機接口功能的需要,考慮性價比,選用新華龍推出的C8051F410單片機,顯示裝置則選擇北京青云公司的LCM128×64藍色背光液晶,按照總體設(shè)計規(guī)劃設(shè)置6個按鍵,采用矩陣式結(jié)構(gòu)即可。人機接口框圖如圖6所示。

1.2 系統(tǒng)軟件設(shè)計
(1)系統(tǒng)軟件架構(gòu)
鑒于整個系統(tǒng)要實現(xiàn)的任務(wù)繁多,DSP各外設(shè)均被應(yīng)用,對處理的實時性要求比較高,并且DSP(TMS320F2808)平臺支持和能承載RTOS的開發(fā),所以系統(tǒng)軟件采用mC/OS-II設(shè)計。mC/OS-II是一種源碼公開、可移植、可固化(ROMable)、可裁減(scalable)、可剝奪性(preemptive)、占先式的實時多任務(wù)操作系統(tǒng)[3,5]。整個系統(tǒng)軟件分為兩步:a.μ C/OS-II到DSP移植;b.μC/OS-II平臺上軟件的編寫。μ C/OS-II到DSP移植只需要修改與處理器相關(guān)的OS_CPU.H、OS_CPU_C.C和OS CPU A.A三個文件的代碼,移植的工作量相對較小。由于μ C/OS-II是基于優(yōu)先級的搶占式實時多任務(wù)操作系統(tǒng),因此,在進行代碼編寫之前,應(yīng)先確認系統(tǒng)的任務(wù)數(shù),每個任務(wù)的優(yōu)先級別,并為每個任務(wù)分配一定數(shù)量的堆棧空間以供運行時調(diào)用。也就是說,要首先對復合磁場控制系統(tǒng)軟件的各功能模塊進行管理。
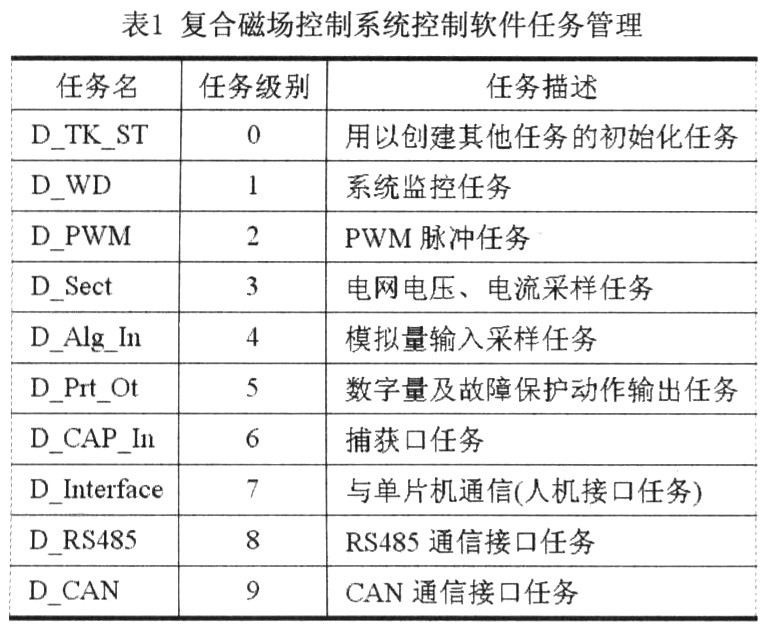
根據(jù)復合磁場控制系統(tǒng)的特殊性,將控制軟件分為0~9十個級別,表1為軟件各功能模塊以及分別對應(yīng)的任務(wù)名稱、任務(wù)優(yōu)先級別。
控制程序的流程是:首先進行CPU及程序數(shù)據(jù)初始化;再進行操作系統(tǒng)初始化,主要完成任務(wù)控制塊(TCB)初始化、TCB優(yōu)先級表初始化、TCB鏈表初始化、事件控制塊(ECB)鏈表初始化、空任務(wù)的創(chuàng)建等等;然后創(chuàng)建任務(wù)D TK ST,在任務(wù)D TK ST中再創(chuàng)建其他任務(wù);最后啟動多任務(wù)調(diào)度。在多任務(wù)調(diào)度開始后,啟動時鐘節(jié)拍源開始計時,此節(jié)拍源給系統(tǒng)提供周期性的時鐘中斷信號,實現(xiàn)延時和超時確認。當時鐘中斷來臨時,系統(tǒng)把當前正在執(zhí)行的任務(wù)掛起,保護現(xiàn)場,進行中斷處理,判斷有無任務(wù)延時到期,若有,則使該任務(wù)進入就緒態(tài),并把所有進入就緒態(tài)的任務(wù)的優(yōu)先級進行比較,通過任務(wù)切換去執(zhí)行最高優(yōu)先級的任務(wù),若沒有別的任務(wù)進入就緒態(tài),則恢復現(xiàn)場繼續(xù)執(zhí)行原任務(wù)。任務(wù)之間通過信號量和消息郵箱進行通信,任務(wù)和中斷之間通過消息郵箱進行通信。
在保證功能實現(xiàn)的基礎(chǔ)上,為進一步提高系統(tǒng)的可靠性,增加了系統(tǒng)監(jiān)控任務(wù)。該任務(wù)功能是監(jiān)視系統(tǒng)其他任務(wù)的運行。被監(jiān)視任務(wù)在其即將運行完畢時監(jiān)視任務(wù)發(fā)送消息說明自身運行正常。被監(jiān)視任務(wù)運行時,監(jiān)視任務(wù)等待被監(jiān)視任務(wù)給它發(fā)送消息,等待時間被設(shè)定為預(yù)計的任務(wù)正常運行所需的最大時間。若等待時間內(nèi)監(jiān)視任務(wù)收到消息,則認為發(fā)送消息的任務(wù)運行正常,依照各任務(wù)執(zhí)行順序的開始運行下一任務(wù),監(jiān)視任務(wù)等待下一任務(wù)發(fā)送的消息。若等待時間已過,監(jiān)視任務(wù)仍未收到消息,則系統(tǒng)的時間管理函數(shù)將強行把監(jiān)視任務(wù)視為就緒狀態(tài)。因為監(jiān)視任務(wù)的優(yōu)先權(quán)是最高的,它將搶占對CPU的控制權(quán)并采取相應(yīng)的糾錯方案以保證系統(tǒng)的穩(wěn)定運行。
(2)人機接口程序設(shè)計
人機接口包括單片機初始化、鍵盤掃描子程序、LCD子程序、SPI通信子程序。具體軟件實現(xiàn)流程圖如圖7所示。LCD與單片機之間采用串行通信方式,針對LCD自身獨特的串口通信協(xié)議,單片機利用I/O口模擬此協(xié)議,各數(shù)據(jù)線為提高通信穩(wěn)定性和抗干擾能力均進行了一階低通濾波處理(100W,100p)。在實際的鍵盤掃描程序里進行了軟件防抖處理。

(3)高頻雙窄脈沖列軟件設(shè)計
針對高頻雙窄脈沖列的具體要求和前面設(shè)計的原理框圖,通過QuartusII軟件平臺,采用VHDL語言編程分別構(gòu)造定時計數(shù)器、2選1開關(guān)(初始狀態(tài)輸出'1')、邏輯與門三個功能模塊并按原理圖連接,仿真結(jié)果能很好地達到所要求的前沿一致,仿真波形如圖8所示。將所設(shè)計的程序下載到CPLD(Altera開發(fā)板)里面分別利用模擬示波器和虛擬儀器觀察,達到了預(yù)期設(shè)計目的。虛擬儀器觀察波形如圖9所示。(仿真波形中:Duble clk-雙窄脈沖;out_serial-高頻雙窄脈沖列;虛擬儀器波形中;黃色線(下)-雙窄脈沖;綠色線(上)-高頻雙窄脈沖列。)
2 結(jié)語
本文針對鋁電磁半連續(xù)鑄造特殊復合磁場的控制要求,在鋁電磁快速連續(xù)鑄軋復合磁場控制器的基礎(chǔ)上(已在福州瑞閩鋁板帶廠運行),設(shè)計了改進的磁場控制器。雙核(DSP+單片機)的處理形式,便于整體功能的實現(xiàn)和提高系統(tǒng)的穩(wěn)定與可靠性。利用CPLD實現(xiàn)大功率晶閘管的觸發(fā)脈沖方式一高頻脈沖列,穩(wěn)定性高、應(yīng)用靈活。鑒于特殊復合磁場控制器工作環(huán)境的惡劣,在PCB板的制作上充分考慮EMC和EMI的處理措施,如A/D信號分開、電源模塊的良好設(shè)計和管理、大/小信號的分開、A/D采樣信號線的處理、I/O的光電隔離等,經(jīng)過測試,效果良好。