
摘 要 Linux嵌入式系統(tǒng)在啟動(dòng)過程中如何喂狗是提高嵌入式系統(tǒng)可靠性需要解決的問題,傳統(tǒng)做法是用復(fù)雜看門狗電路或在啟動(dòng)過程中關(guān)閉看門狗。本文提出了一種嵌入式系統(tǒng)喂狗策略,可以實(shí)現(xiàn)系統(tǒng)在啟動(dòng)過程和運(yùn)行過程中全程喂狗。基于簡(jiǎn)單的硬件電路,在系統(tǒng)不同過程的程序中插入喂狗程序。實(shí)驗(yàn)表明,該方法簡(jiǎn)單可行,成本較低,是一種嵌入式系統(tǒng)的可靠喂狗方法。
關(guān)鍵詞 嵌入式系統(tǒng) 看門狗 全程喂狗 IMP706 Linux
引 言
在嵌入式系統(tǒng)中,為了使系統(tǒng)在異常情況下能自動(dòng)恢復(fù),一般都會(huì)引入看門狗電路。看門狗電路其實(shí)就是一個(gè)計(jì)數(shù)器。當(dāng)看門狗啟動(dòng)后,計(jì)數(shù)器開始自動(dòng)計(jì)數(shù),經(jīng)過一定時(shí)間計(jì)數(shù)器溢出就會(huì)對(duì)CPU產(chǎn)生一個(gè)復(fù)位信號(hào)使系統(tǒng)重啟。系統(tǒng)正常運(yùn)行時(shí),需要在看門狗允許的時(shí)間間隔內(nèi)對(duì)看門狗計(jì)數(shù)器清零也即喂狗,不讓復(fù)位信號(hào)產(chǎn)生。
當(dāng)前在帶Linux操作系統(tǒng)的嵌入式系統(tǒng)中,由于Linux操作系統(tǒng)加載時(shí)間較長(zhǎng)(如lO~30 s),一般都超過看門狗的時(shí)間間隔(典型值為1.6 s);而如果不采取特殊措施,則系統(tǒng)在Linux操作系統(tǒng)加載過程中復(fù)位,Linux操作系統(tǒng)永遠(yuǎn)無法加載成功。為了解決這個(gè)問題,通常有兩種方案:做一個(gè)看門狗的時(shí)間間隔更長(zhǎng)的硬件電路;修改內(nèi)核,在內(nèi)核啟動(dòng)過程中將看門狗設(shè)成無效。以上方案無法解決嵌入式系統(tǒng)在操作系統(tǒng)啟動(dòng)階段的失效問題,降低了系統(tǒng)可靠性。
本文提出了一種嵌入式系統(tǒng)全程喂狗策略及實(shí)現(xiàn)方法,從系統(tǒng)上電、引導(dǎo)程序(Bootloader)、操作系統(tǒng)內(nèi)核直至應(yīng)用階段都啟用看門狗。實(shí)驗(yàn)表明,該方法簡(jiǎn)單可行,成本較低,在嵌入式系統(tǒng)的全過程中都可以實(shí)現(xiàn)喂狗策略,提高了系統(tǒng)可靠性。
1 系統(tǒng)總體設(shè)計(jì)
采用IMP706芯片組成硬件看門狗電路(看門狗的時(shí)間間隔為1.6 s),在操作系統(tǒng)程序(包括Bootloader)和應(yīng)用程序中插入喂狗程序,這些喂狗程序運(yùn)行時(shí)間間隔小于看門狗的時(shí)間間隔(本設(shè)計(jì)選為1 s)。這樣做可以保證:如果系統(tǒng)正常工作,系統(tǒng)可以在小于看門狗的時(shí)間間隔內(nèi)不斷進(jìn)行喂狗動(dòng)作,硬件看門狗的計(jì)數(shù)器不斷清零,不產(chǎn)生復(fù)位信號(hào);如果系統(tǒng)非正常工作,喂狗動(dòng)作失效,硬件看門狗的計(jì)數(shù)器在1.6 s后溢出,對(duì)CPU產(chǎn)生復(fù)位信號(hào)使系統(tǒng)重啟。
1.1 看門狗電路設(shè)計(jì)
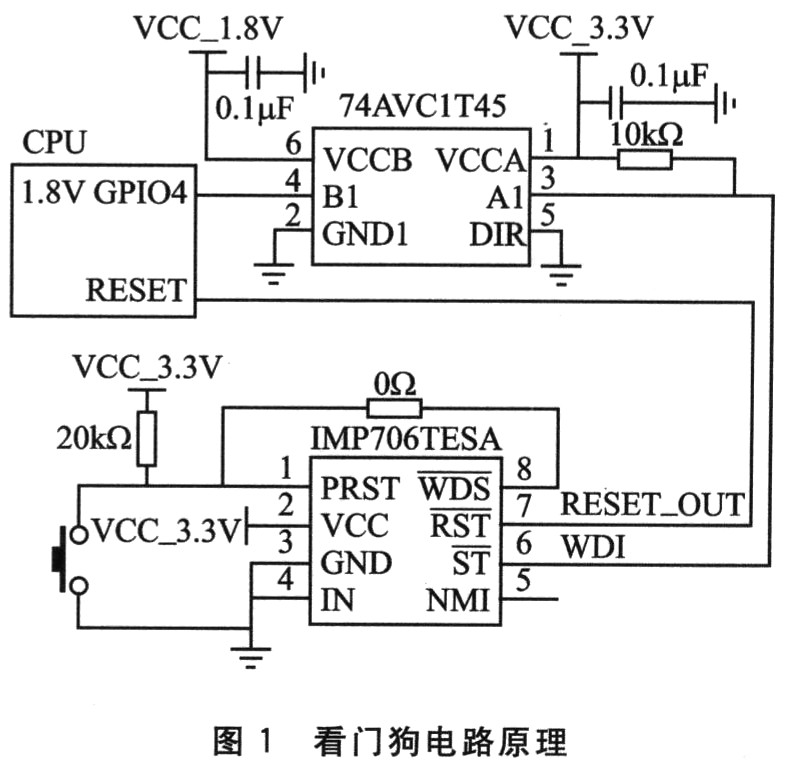
圖1為看門狗電路原理,采用IMP706芯片組成硬件看門狗電路,通過電平轉(zhuǎn)換器件74AVClT45,硬件看門狗器件的ST腳與中央處理器(CPU)的GPIO3腳相連。看門狗器件的PRST腳與IN腳接到復(fù)位開關(guān),RST腳接到CPU的RESET腳,當(dāng)復(fù)位開關(guān)被觸動(dòng)或看門狗器件的計(jì)數(shù)器溢出時(shí),看門狗器件的RST腳輸出復(fù)位信號(hào)給CPU的RESET腳,CPU復(fù)位重啟。
1.2 喂狗策略及實(shí)現(xiàn)
1.2.1 Bootloader階段
在Boot1oader階段(本設(shè)計(jì)采用U—boot,但不限于此),喂狗策略是在Bootloader的程序中不同位置插入喂狗程序。具體做法是:由于Bootoader第一階段的啟動(dòng)不會(huì)超過1.6 s,因此只需在Bootoader的第二階段,如Flash讀寫、CRC校驗(yàn)、循環(huán)等待等處,插入喂狗代碼。喂狗代碼采用直接置位中央處理器的GPIO3狀態(tài)寄存器的方式進(jìn)行。
首先在特定平臺(tái)的定義頭文件include/conffigs/xxx.h中加入看門狗的宏定義:
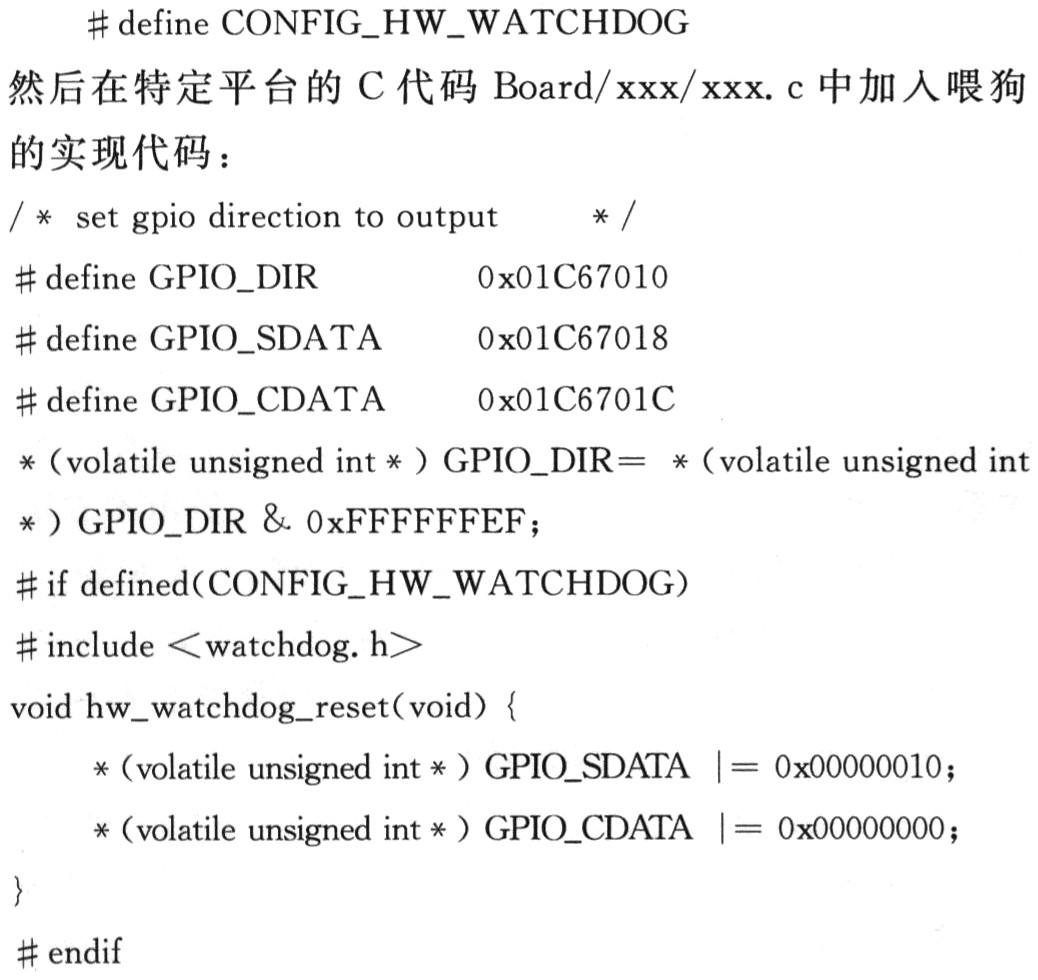
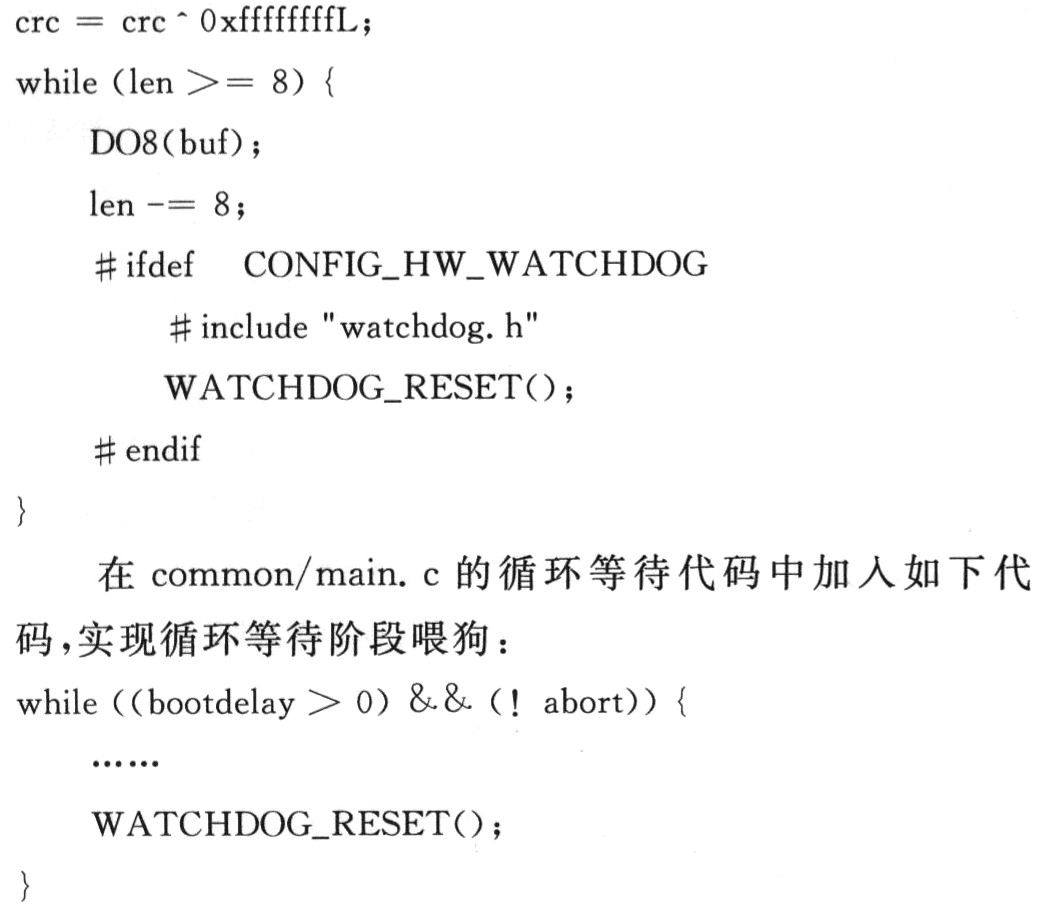
在lib_generic下的CRC校驗(yàn)階段代碼crc32.c中加入如下代碼,實(shí)現(xiàn)CRC校驗(yàn)階段喂狗:
1.2.2 Linux內(nèi)核階段
在Linux內(nèi)核加載階段(采用MontaVista Linux操作系統(tǒng),但不限于此),喂狗策略是在Linux內(nèi)核程序的不同位置插入喂狗程序。具體做法是:首先在Linux內(nèi)核階段1的內(nèi)核解壓縮程序、RTC驅(qū)動(dòng)加載程序、GPIO驅(qū)動(dòng)加載程序適當(dāng)代碼處插入喂狗代碼,喂狗代碼以直接取反中央處理器的GPIO3狀態(tài)寄存器的方式進(jìn)行;在Linux內(nèi)核階段2的Watchdog驅(qū)動(dòng)加載程序適當(dāng)代碼處插入喂狗代碼,喂狗代碼調(diào)用GPIO驅(qū)動(dòng),GPIO驅(qū)動(dòng)內(nèi)含取反中央處理器的GPIO3狀態(tài)寄存器的操作;在Linux內(nèi)核階段3的內(nèi)核加載根文件系統(tǒng)程序、init程序的適當(dāng)代碼處調(diào)用Linux的Watchdog驅(qū)動(dòng),Watchdog驅(qū)動(dòng)內(nèi)含取反中央處理器的GPIO3狀態(tài)寄存器的操作。
以上內(nèi)核階段的劃分是以GPIO及Watchdog驅(qū)動(dòng)的加載為標(biāo)志的。GPIO驅(qū)動(dòng)加載之前為內(nèi)核階段1,GPIO驅(qū)動(dòng)加載之后至Watchdog驅(qū)動(dòng)加載之前為內(nèi)核階段2,Watchdog驅(qū)動(dòng)加載之后為內(nèi)核階段3。
下面示例說明內(nèi)核解壓縮asm/arch/boot/compressed.c中喂狗的實(shí)現(xiàn)代碼:
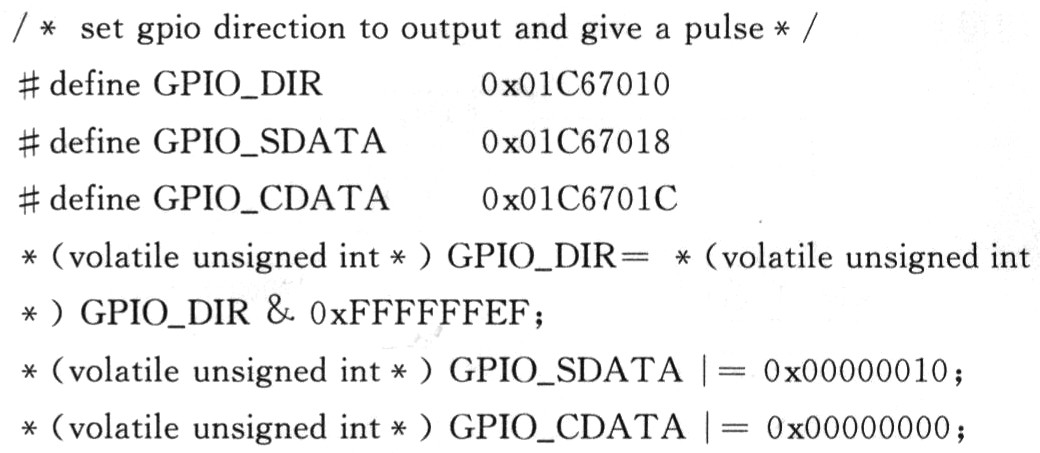
從以上代碼可以看出,它是內(nèi)核階段l喂狗的典型方法,是直接取反GPIO3狀態(tài)寄存器的。
下面示例說明內(nèi)核階段2的喂狗方法(僅以加載RTC驅(qū)動(dòng)為例):首先讓RTC驅(qū)動(dòng)中包含GPIO的頭文件,然后在讀取RTC當(dāng)前值的函數(shù)中調(diào)用GPIO驅(qū)動(dòng)進(jìn)行喂狗。
為了能夠在內(nèi)核階段3調(diào)用Watchdog驅(qū)動(dòng)進(jìn)行喂狗,需要在Watchdog驅(qū)動(dòng)中導(dǎo)出喂狗函數(shù)以供內(nèi)核階段3使用。Watchdog驅(qū)動(dòng)喂狗也是調(diào)用GPIO驅(qū)動(dòng)實(shí)現(xiàn)的,但Watchdog驅(qū)動(dòng)一旦加載完成,以后的喂狗都通過調(diào)用Watchdog驅(qū)動(dòng)完成。
1.2.3 程序運(yùn)行階段
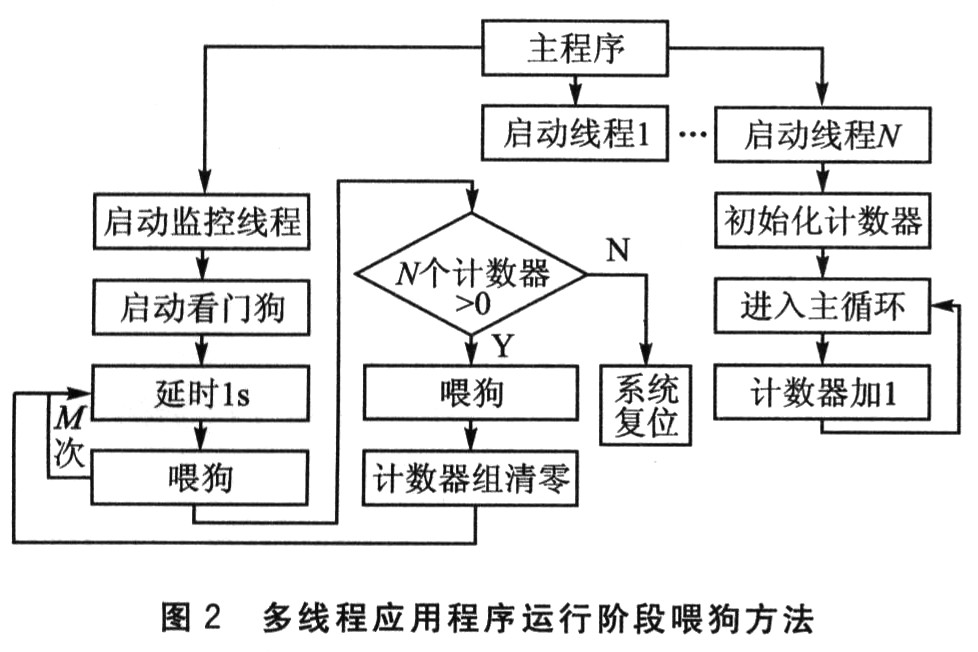
圖2為多線程應(yīng)用程序運(yùn)行階段喂狗方法。在主程序中首先創(chuàng)建一個(gè)監(jiān)控線程,它的優(yōu)先級(jí)高于其他線程。監(jiān)控線程在其他被監(jiān)控的線程正常工作的情況下,一定時(shí)間內(nèi)對(duì)看門狗進(jìn)行喂狗操作,喂狗操作通過調(diào)用Watch—dog驅(qū)動(dòng)來完成。如果某個(gè)線程出現(xiàn)故障,監(jiān)控線程就不執(zhí)行喂狗操作,也就達(dá)到這個(gè)線程出現(xiàn)故障時(shí)系統(tǒng)自動(dòng)重啟的目的。如果監(jiān)控線程自身出現(xiàn)故障,不能及時(shí)執(zhí)行喂狗操作,看門狗也自動(dòng)復(fù)位重啟。具體做法是,主程序首先啟動(dòng)監(jiān)控線程,然后依次啟動(dòng)N個(gè)被監(jiān)控的線程,每一線程內(nèi)都設(shè)置一計(jì)數(shù)器。被監(jiān)控的線程中首先對(duì)線程內(nèi)的計(jì)數(shù)器初始化為O,在各個(gè)線程主循環(huán)中,對(duì)相應(yīng)的計(jì)數(shù)器執(zhí)行加1操作。監(jiān)控任務(wù)首先啟動(dòng)看門狗,進(jìn)入循環(huán)。每隔M秒對(duì)各線程內(nèi)的計(jì)數(shù)器進(jìn)行檢驗(yàn),在M秒內(nèi)每隔1 s要對(duì)看門狗喂狗,否則系統(tǒng)就會(huì)復(fù)位重啟。查詢N個(gè)計(jì)數(shù)器值是否為0,如果全都大于0,則說明對(duì)應(yīng)接受監(jiān)控的線程正常運(yùn)行,然后對(duì)看門狗喂狗,并將N個(gè)計(jì)數(shù)器值清零。如果有任意一個(gè)計(jì)數(shù)器值為O,檢測(cè)到對(duì)應(yīng)接受監(jiān)視的線程出現(xiàn)故障需要重啟,這時(shí)不對(duì)看門狗喂狗,使得系統(tǒng)復(fù)位重啟。
以下示例說明在應(yīng)用中如何調(diào)用Watchdog驅(qū)動(dòng)實(shí)現(xiàn)喂狗:
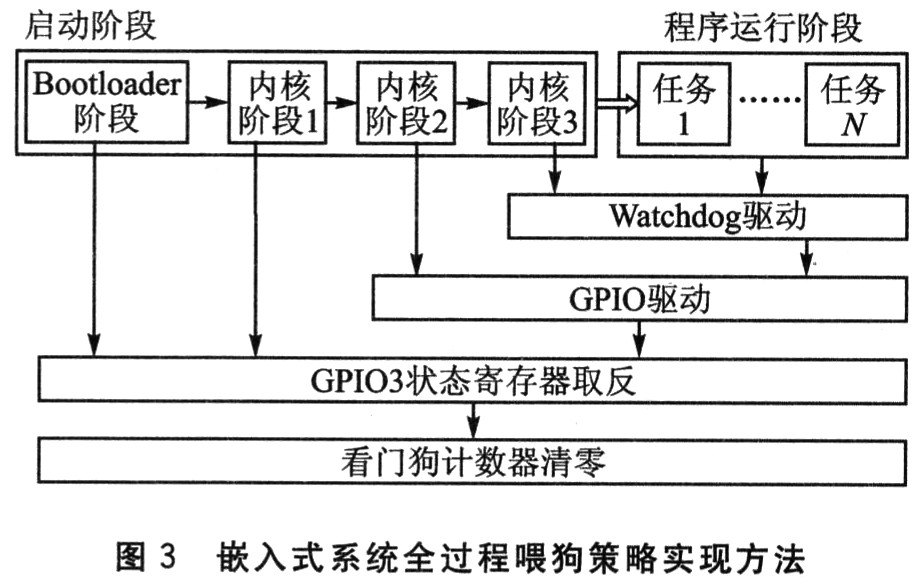
總之,在系統(tǒng)不同階段,由于系統(tǒng)調(diào)用和封裝程度不同,看門狗的喂狗實(shí)現(xiàn)方法也不同:在Bootloader階段,直接取反中央處理器的GPIO3的狀態(tài)寄存器;在Linux內(nèi)核階段1,采取取反中央處理器的GPIO3的狀態(tài)寄存器的方法進(jìn)行;在Linux內(nèi)核階段2,采取調(diào)用GPIO的驅(qū)動(dòng)的方法進(jìn)行;在Linux內(nèi)核階段3,采取調(diào)用Watchdog驅(qū)動(dòng)的方法進(jìn)行;在應(yīng)用程序運(yùn)行階段,應(yīng)用程序中的喂狗程序采取調(diào)用Watchdog驅(qū)動(dòng)的方法進(jìn)行,如圖3所示。
2 實(shí)驗(yàn)結(jié)果
我們?cè)诠狙邪l(fā)的智能視頻分析器項(xiàng)目中應(yīng)用了本方法。該分析器采用TI DaVinci系列DSP芯片(TMS320DM6446)為CPU,用Monta Vista Linux作為操作系統(tǒng)。操作系統(tǒng)啟動(dòng)時(shí)間約為20~30 s。采用本方法是為了保證系統(tǒng)在全過程中都能得到有效的失效恢復(fù)。在振蕩波抗擾度、電壓波動(dòng)與閃爍、靜電放電、電快速瞬變脈沖群等EMC兼容性測(cè)試中,當(dāng)各強(qiáng)度指標(biāo)超過設(shè)備EMC兼容性設(shè)計(jì)強(qiáng)度時(shí),系統(tǒng)失效,利用這種方式可以測(cè)試本方法在硬件失效時(shí)的效果。以靜電放電為例,設(shè)計(jì)放電等級(jí)為±6 kV(我們?nèi)?plusmn;7 kV的強(qiáng)度等級(jí)),設(shè)備上電后,分別在1~30 s內(nèi)每隔5 s及在120 s處進(jìn)行靜電放電測(cè)試,經(jīng)觀察設(shè)備都可以即時(shí)恢復(fù)。
對(duì)軟件失效時(shí)本方法效果的測(cè)試,采用故障植入腳本的主動(dòng)方式及系統(tǒng)長(zhǎng)時(shí)間運(yùn)行的被動(dòng)方式進(jìn)行測(cè)試。最終結(jié)果表明,設(shè)備在失效后可即時(shí)恢復(fù)。
綜上所述,本全程喂狗的方法能確保系統(tǒng)在任一階段出現(xiàn)軟件或硬件故障時(shí)都能復(fù)位重啟。
結(jié) 語
本文提出了一種嵌入式系統(tǒng)全程喂狗策略,包括硬件電路設(shè)計(jì)和軟件實(shí)現(xiàn)方法。該方法有如下特點(diǎn):看門狗電路簡(jiǎn)單,硬件只需一塊看門狗芯片,不需復(fù)雜的外圍邏輯電路,成本較低;系統(tǒng)全過程啟用看門狗,確保系統(tǒng)在任一階段出現(xiàn)軟件或硬件故障都能復(fù)位重啟,系統(tǒng)可靠性得到提高。