
1、引言?
發(fā)動機的進排氣門是發(fā)動機的重要零件,廣泛用于汽車,飛機,船舶等行業(yè)。對氣門的質(zhì)量影響最大的因素之一是毛坯成型時的加熱電流。
電鐓機的工作原理圖如上圖1所示,加熱變壓器的次級兩端與砧子、夾持電極及毛坯構(gòu)成回路,在低電壓、大電流的作用下,毛坯和砧子間形成的接觸電阻發(fā)熱至成型溫度,在砧子和鐓粗缸的壓力下逐漸成型為‘蒜頭’狀。其工藝過程可分為始鐓和終鐓兩個過程:
1.始鐓階段:在此階段,墩粗缸和砧子缸分別以速度V1和V2向上運動,砧子缸的后退運動用于控制毛坯的初始加熱、變形長度,其中V1>V2。在此階段毛坯通過大電流發(fā)熱并逐漸變形為蒜頭狀。
2.終鐓階段:在始鐓過程結(jié)束時,砧子缸運動暫停。墩粗缸繼續(xù)向上運動。
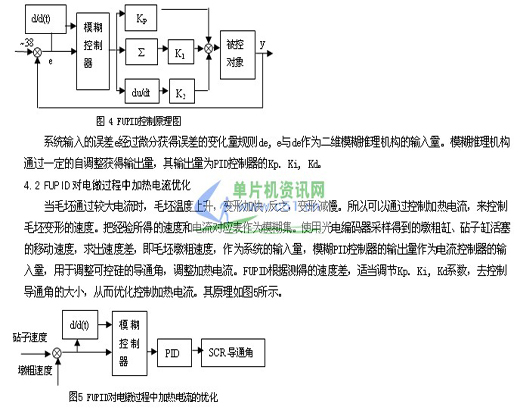
由上鐓粗過程可見,鐓粗缸、砧子缸的速度、鐓粗壓力和加熱電流等參數(shù)對氣門毛坯成形質(zhì)量起著決定性作用。其中,加熱電流是該控制系統(tǒng)中的一個最關(guān)鍵參數(shù)。一般來說,鐓粗溫度過低時材料的塑性差,易產(chǎn)生裂紋,甚至鐓裂;但過高的鐓粗溫度將導(dǎo)致晶粒粗大,產(chǎn)生過熱,甚至過燒[1]。因此,鐓粗溫度是決定鐓粗質(zhì)量的最關(guān)鍵工藝參數(shù)之一。從理論上分析,工件在加熱頂鍛過程中其變形曲線是不規(guī)則的,最好是電流隨變形的變化而變化[2]。因此,提高質(zhì)量的關(guān)鍵在于對加熱電流的合理控制。
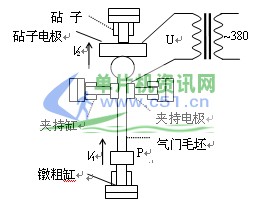
圖1電鐓機工作原理圖
2、可控硅觸發(fā)方式
3、可控硅移相調(diào)功在嵌入式系統(tǒng)中的實現(xiàn)
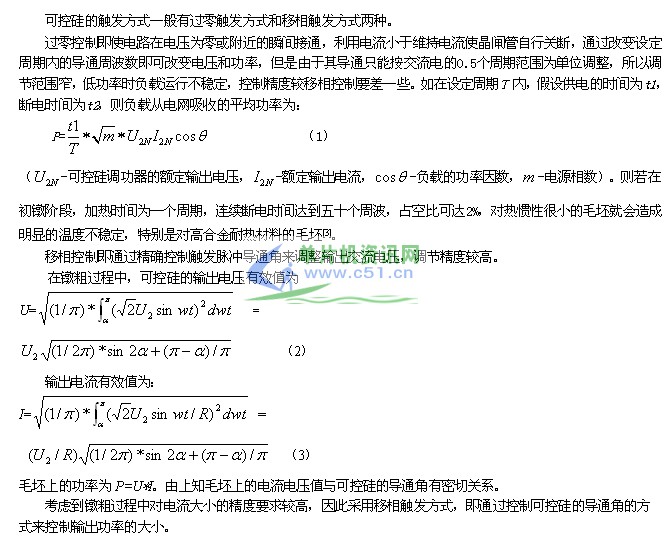
作者開發(fā)的基于ARM微處理器和實時操作系統(tǒng)的電鐓機控制系統(tǒng)具有功能強、穩(wěn)定性好等優(yōu)點。系統(tǒng)中ARM對可控硅的觸發(fā)控制原理如圖2所示:
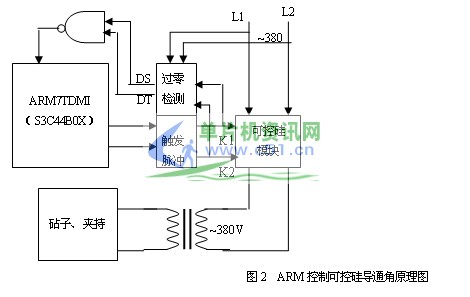
圖3為過零檢測原理圖。用光電隔離器TIP521對電壓過零檢測。當(dāng)電壓沒有過零時,TIP521中有一路導(dǎo)通,則DT&DS=0;當(dāng)電壓過零時,則DT&DS=1。DT、DS經(jīng)一與非門接到S3C44B0X的PG0口,則當(dāng)電壓過零時,觸發(fā)中斷EXINT0。
4、基于FUPID的加熱電流優(yōu)化控制策略
電鐓機鐓粗過程中鐓粗壓力、鐓粗缸和砧子缸的速度以及加熱電流等幾個參數(shù)對氣門成型溫度、成型形狀及質(zhì)量等有直接影響,而且各參數(shù)需優(yōu)化配合。加熱電流直接影響加熱溫度,但鐓粗速度也會影響加熱溫度,而鐓粗速度又受加熱溫度和鐓粗壓力的影響。這些參數(shù)之間互相影響,且這幾個參數(shù)的變化關(guān)系是非線性的,用常規(guī)的PID控制器,難達到較好的效果。
FuPID是將模糊控制與經(jīng)典PID控制相結(jié)合形成的新型控制器,適用于非線性嚴(yán)重、工況變化大的過程,能夠有效提高控制品質(zhì)。FuPID使用方便,參數(shù)調(diào)整可以參照PID控制器的調(diào)節(jié)經(jīng)驗進行。FuPID還可以根據(jù)實際對象的特點,實現(xiàn)局部控制規(guī)則的調(diào)整,從而實現(xiàn)控制參數(shù)的局部優(yōu)化,實現(xiàn)更好的調(diào)節(jié)效果。
4.1 模糊控制控制策略
模糊控制器[4][5]是一種語言型控制器,故也稱為模糊語言控制器,其核心就是利用模糊集合理論,把人的控制策略的自然語言轉(zhuǎn)化為計算機能夠接受的算法語言所描述的控制算法,這種方法不僅能實現(xiàn)控制,而且能模擬人的思維方式對一些無法構(gòu)造數(shù)學(xué)模型的被控對象進行有效的控制。
模糊控制的主要步驟是:
①將真實的確定量輸入轉(zhuǎn)換成一個模糊矢量。
②轉(zhuǎn)換的模糊矢量由基于專家或手動操作熟練人員長期經(jīng)驗而推理形成的一種語言表示形式-模糊規(guī)則,來計算出模糊的控制量。
③由模糊控制量計算處理得到精確的控制量并輸出到執(zhí)行機構(gòu)上。
為了提高控制性能,采用二維模糊控制器。FUPID控制器結(jié)構(gòu)框圖如4所示:
5、可控硅調(diào)功控制的軟件實現(xiàn)
5.1 電壓過零點檢測
電壓過零檢測端口接到ARM端口G的PG0端口,則當(dāng)電壓過零時觸發(fā)ARM的外部中斷EXINT0。
中斷初始化為:
Void init_Ext0(void)
{ rINTMOD=0x0;//設(shè)置為IRQ中斷
rINTCON= 0x1;//允許IRQ中斷
……}
Void Eint0Isr(void) //中斷服務(wù)程序
{
OS_ENTER_CRITICAL();//關(guān)中斷
rI_ISPC=BIT_EINT0; //清掛起位
rEXTINTPND=0xf;//清EXTINTPND
OS_EXIT_CRITICAL();//開中斷
OSSemPost(Sem);
}
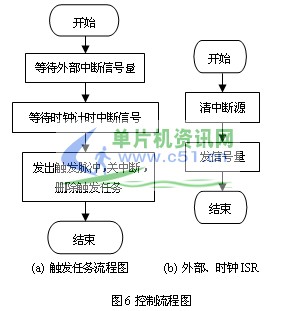
5.2 觸發(fā)脈沖的實現(xiàn)
檢測到電壓過零后,啟動定時器來對導(dǎo)通角觸發(fā)位置進行計時,當(dāng)計時時間到時,由PE5口發(fā)出一觸發(fā)脈沖。在系統(tǒng)中采用定時器0來定時。時鐘初始化程序為:
Void timer_Int(void)
{
rINTMOD=0x0;
rINTCON=0x1;//使能中斷
}
Void TaskChufa(void *pdata)
{`設(shè)定定時器的定時時間`
Void timer_Int;
OSSemPend(Sem,0,&err);
//等待外部中斷EXINT0的中斷信號量。
rTCON=0x19;//使能定時器0
OSSemPend(Ssz,0,&err);
//等待定時器0的中斷信號量。
`產(chǎn)生觸發(fā)脈沖`
OSSemPost(Smg);
OSTASKDel(OS_PRIO_SELF);
}
時鐘中斷程序為:
Void zd_timer(void)
{
OS_ENTER_CRITICAL();//關(guān)中斷
rINTCON=0x0;//禁止中斷
OS_EXIT_CRITICAL();//開中斷
OSSemPost(Ssz);
}
5.3 控制流程
#include
…………………
OS_STK TaskChufaStk[TaskStk]
Void TaskChufa(void *pdata)
OS_EVENT *Sem;
OS_EVENT *Ssz;
OS_EVENT *Smg;
Int main(void)
{
OSInit();
OSTaskCreate(TaskKey,(void*)0,
&TaskKeyStk[TaskStk-1],3);
OSStart;
return(0);
}
6、結(jié)束語
在嵌入式電鐓機中,利用可控硅移相觸發(fā)方式可提高加熱電流的控制精度;利用FUPID算法對加熱電流控制進行優(yōu)化處理,對氣門成型的合格率及生產(chǎn)效率有極大的提高。