
本文引用地址:http://www.eepw.com.cn/article/202302/443544.htm
0 引言
近些年來,伴隨著圖形處理技術(shù)、計算機視覺和元宇宙等相關(guān)技術(shù)的進步,實現(xiàn)無人設(shè)備高精度、強魯棒性的定位導(dǎo)航始終為無人系統(tǒng)中的關(guān)鍵環(huán)節(jié)和待突破環(huán)節(jié)。美國國防研究與工程署連續(xù)數(shù)年組織機器人生存挑戰(zhàn)賽,以求在復(fù)雜環(huán)境下探索提升導(dǎo)航性能,確保美軍在無人領(lǐng)域的領(lǐng)先地位。中國科協(xié)也于2020 年將無人車的高精度智能導(dǎo)航問題列為十大工程技術(shù)難題之一[1]。
無人系統(tǒng)導(dǎo)航領(lǐng)域一直以即時定位與地圖構(gòu)建(Simultaneous Localization And Mapping,SLAM) 技術(shù)為核心。純視覺導(dǎo)航由于缺乏深度信息導(dǎo)致對運動敏感薄弱,需要依賴回環(huán)檢測來校正誤差,這導(dǎo)致其魯棒性不足。視覺導(dǎo)航與衛(wèi)星導(dǎo)航系統(tǒng)的組合導(dǎo)航在復(fù)雜的城市場景下,光影變幻導(dǎo)致有效特征點選取難度變大,諸如地下車庫等場景對衛(wèi)星信號干擾強烈,而本文介紹的視覺慣性導(dǎo)航有著顯著的優(yōu)勢。
一是誤差的互補:視覺導(dǎo)航的穩(wěn)定位姿估計可以彌補慣性導(dǎo)航自身固存的累積誤差, 慣性導(dǎo)航測量單元(Inertial Measurement Unit,IMU)高頻率的動態(tài)信號可以補足相機的深度信息;二是適用速度領(lǐng)域的 互補:視覺導(dǎo)航在低速靜態(tài)領(lǐng)域的優(yōu)秀表現(xiàn),可以抑制IMU的零漂。而在高速運動場景領(lǐng)域,慣性導(dǎo)航可以解決視覺導(dǎo)航由于圖像幀之間缺乏重疊區(qū)域,導(dǎo)致特征提取算法失效的問題。
1 經(jīng)典融合框架
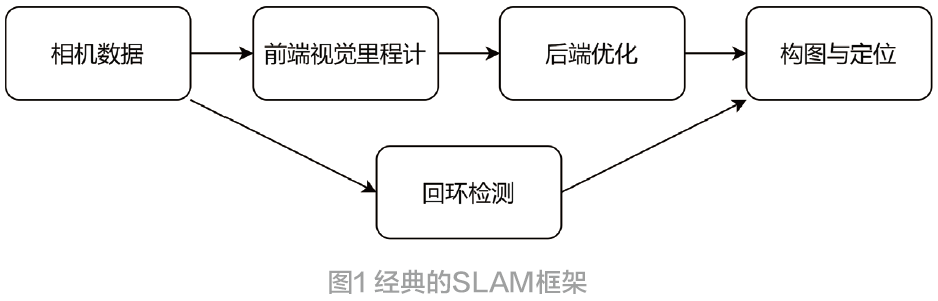
經(jīng)典融合框架中,松耦合算法是視覺慣性領(lǐng)域早期重點研究內(nèi)容。松耦合算法主要依靠卡爾曼濾波器及其后續(xù)改進版本,諸如應(yīng)用廣泛的擴展卡爾曼濾波器(Extended Kalman Filter,EKF)、基于蒙特卡洛原理的無跡卡爾曼濾波器(Unscented Kalman Filter,UKF)、非線性非高斯領(lǐng)域表現(xiàn)不俗的粒子濾波器(Particle Filter,PF)等的松耦合方 案陸續(xù)提出。Kelly提出的無人機視覺慣性導(dǎo)航[2]缺少對傳感器信息缺乏交叉項誤差,無法全面利用傳感器信息,故精度有限。自2010 年起,慣性輔助視覺的緊耦合算法大量出現(xiàn),由Davison等人提出的單目SLAM[3]開辟了緊耦合領(lǐng)域的先河。SLAM算法框架如圖1 所示。
同一時間,Klein[4]等提出了平行跟蹤與建圖(Parallel Tracking And Mapping,PTAM)該文章也是視覺SLAM中里程碑式的文章,為視覺建圖開辟了新的路徑。由于早期文章均針對簡單場景建模,且傳感器采樣率低,特征點提取成功率有限[5]。之后相關(guān)研究跟進,經(jīng)典融合框架發(fā)展迅速。自此以視覺傳感器為核心,慣導(dǎo)信息輔助優(yōu)化后端環(huán)節(jié)成為了主流研究方案。
H.Ranch、F.Tung 與C.Striebel 合作提出了固定區(qū)間最優(yōu)平滑算法[6]。該算法在數(shù)據(jù)后端處理中具有重要的應(yīng)用價值,在前向估計的基礎(chǔ)上加上反向濾波,充分利用了量測區(qū)間內(nèi)的所有量測值,具有更高的估計精度,所以主流的算法大都使用該理論作為航跡推算框架。
其中以擴展卡爾曼濾波器為基礎(chǔ)的多態(tài)融合卡爾曼濾波器(Multi-State Constraint Kalman Filter,MSCKF)最具有代表性[7],此算法最先由Mouriki 和Roumeliotis于2007 年提出,MSCKF 最重要的突破點在于,解決了傳統(tǒng)松耦合算法在圖像信息豐富情景下,視覺算法選取特征點超出系統(tǒng)處理能力的問題。
2012 年,預(yù)積分理論[8]的提出,為本領(lǐng)域研究帶來了深遠影響。系統(tǒng)中為了減小優(yōu)化求解器的負擔,采用了關(guān)鍵幀策略,由于IMU 的速率顯然要快于關(guān)鍵幀的插入, 預(yù)積分干通過重新參數(shù)化,將關(guān)鍵幀間的IMU測量值積分成相對運動的形式,避免了因為初始條件變化造成的無用信息。隨后Foster也將其拓展到李代數(shù)上,當然也增大了預(yù)積分的計算量[9]。
在預(yù)積分理論基礎(chǔ)上, Raul Mur-Artal 等人提出了ORB-SLAM算法。在此基礎(chǔ)上結(jié)合慣性技術(shù),構(gòu)想出了一種視覺慣性快速旋轉(zhuǎn)二進制描述子算法[10](Visual Inertial-Oriented fast and Rotated Brief SLAM,VI-ORB SLAM)。VI-ORB 算法對特征提取也做出了改進,在BRIEF采點的基礎(chǔ)上提出了Fast 采點方案,提出定義特征點方向,來實現(xiàn)特征點的旋轉(zhuǎn)不變形。
如果說ORB-SLAM 是導(dǎo)航領(lǐng)域的一顆明珠,那么香港科技大學的沈劭劼的單目視覺慣性系統(tǒng)算法[12](Monocular Visual-Inertial System,VINS-Mono) 無疑是另一個代表性成果。VINS-Mono 提出了一種健壯的基于緊耦合滑動窗口非線性優(yōu)化的單目視覺慣性里程計,初始化策略,包括對相機與IMU 間的外參、數(shù)據(jù)間時間戳進行在線校準。該算法在前端的處理上使用光流追蹤特征點,當讀取到新圖像后提取Harris 角點[13],然后使用光流法在更新環(huán)節(jié)迭代計算,最后利用RANSAC[14]算法對跟蹤錯誤的特征點進行剔除, 其框架如如圖2 所示。
總的來說,視覺慣性導(dǎo)航算法已經(jīng)經(jīng)過了長足的發(fā)展,在前端和后端上的大量改進使得導(dǎo)航精度不斷提升,伴隨著性能的提升,其計算量也在大幅提升,對于實際應(yīng)用仍是一個考驗。
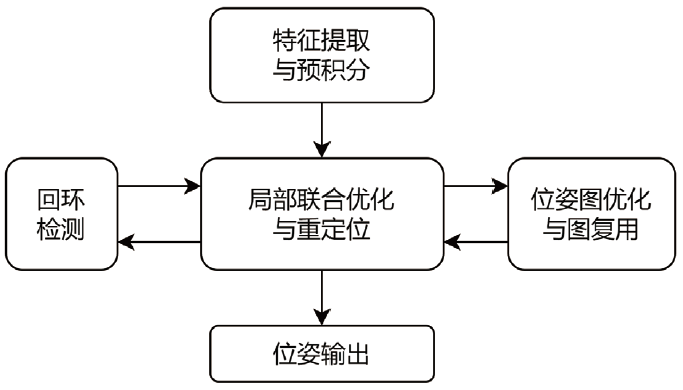
圖2 VINS框架
2 新型融合框架
為提高圖像 識別準確度,斯坦福大學李飛飛團隊舉辦了圖像識別挑戰(zhàn)賽,Alex 等人設(shè)計的Alex Net 模型[15]以領(lǐng)先第2 名近10% 的準確度奪冠,迅速席卷了深度學習領(lǐng)域,使得卷積神經(jīng)網(wǎng)絡(luò)聲名大噪,隨后的卷積神經(jīng)網(wǎng)路的快速算法也廣泛應(yīng)用于本領(lǐng)域[16]。
Huang 提出了使用循環(huán)神經(jīng)網(wǎng)絡(luò)(Recurrent Neural Network,RNN)網(wǎng)絡(luò)學習光流法的視覺里程計[17],該算法就是一種典型的用深度學習替代前端視覺里程計的計算過程的方法。作者立足于單目視覺里 程計,提出了用于估計相機的自我運動的序列到序列算法。該網(wǎng)絡(luò)學習光流的潛在空間并建立圖像序列動力學模型,并且計算連續(xù)圖像的光流場,最終以自編碼方式提取潛在的光流表示。
Li 提出了端到端EKF 的深度視覺- 慣導(dǎo)里程計[18](Towards End-to-end Learning of Visual Inertial Odometry with an EKF)。在耦合思路上仿照專家系統(tǒng),將傳統(tǒng)算法中表現(xiàn)良好的環(huán)節(jié)予以保留。采用深度學習得到的姿態(tài)構(gòu)建量測方程,整體上采用RTS 算法模型,在正反雙方向的計算上優(yōu)化結(jié)果。在數(shù)據(jù)集上測試并證明了系統(tǒng)的有效性。
牛津大學計算機科學系Clark 團隊提出了一種基于流形的序列訓練方法VINet[19]。其改進之處是在中間特征表示水平上進行數(shù)據(jù)融合。作者提出使用長短期記憶(Long Short-Term Memory,LSTM) 來彌補RNN 網(wǎng)絡(luò)對全局信息的把握不足。VINet 整體框圖如圖3 所示。
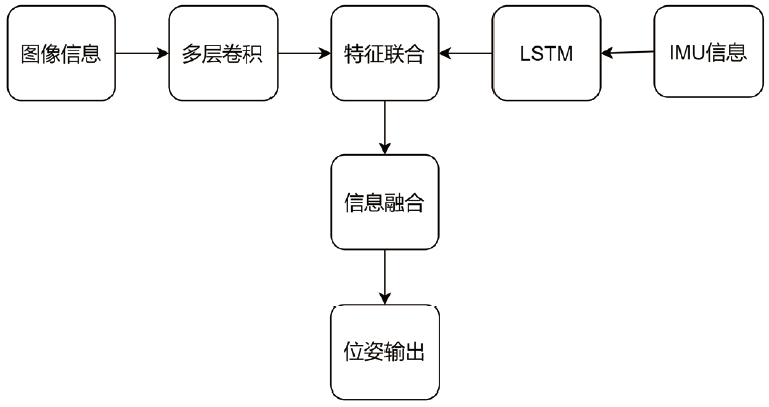
圖3 VINet框架
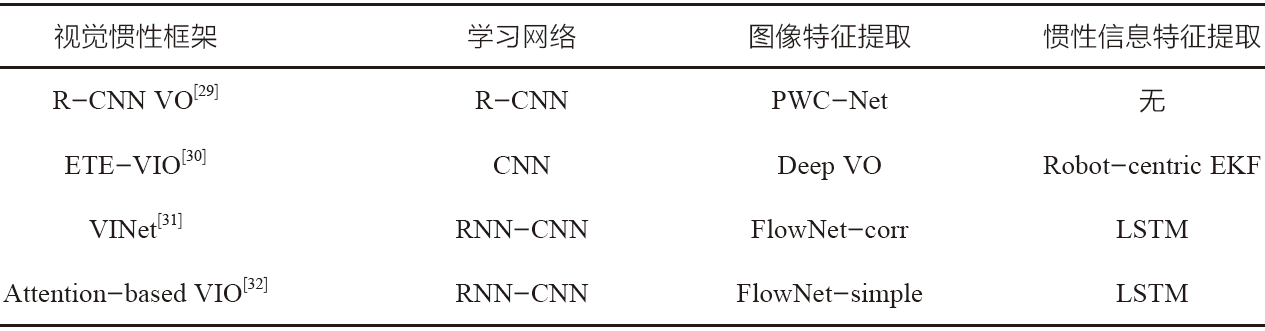
除此以外,Chen 提出了一種新穎的端對端選擇性傳感器融合框架[20],主要應(yīng)用于復(fù)雜環(huán)境下數(shù)據(jù)丟失問題,以及處理野值的框架。由于單目相機圖像信息較少,且缺乏深度信息,在預(yù)測中常出現(xiàn)誤差較大的問題。故構(gòu)架了不同掩蔽策略的方案。將丟失信息的程度劃分為兩類工作環(huán)境,對應(yīng)不同環(huán)境采用不同的策略。結(jié)合故障診斷思想,分為軟、硬兩種融合方案。后驗型視覺慣性導(dǎo)航算法對比表如表1所示。
綜合來看,深度學習在純視覺SLAM方向廣泛使用,在視覺慣性領(lǐng)域仍有較大可發(fā)展空間。對于深度學習在整體框架中使用的比例不盡相同,整體使用框架雖然性能更好但是計算量過大,局部使用計算量更小但是性能表現(xiàn)稍弱。
表1 后驗型視覺慣性導(dǎo)航算法對比
3 展望未來
3.1 多傳感器融合
視覺與慣性耦合算法在機器人領(lǐng)域取得了顯著的成果,在自動駕駛領(lǐng)域,多傳感器融合算法已經(jīng)得到了廣泛應(yīng)用,諸如全球定位系統(tǒng)(Global Positioning System,GPS) 等等。
Lee 提出一種有效而且魯棒的GPS 輔助的視覺慣導(dǎo)里程計系統(tǒng)(GPS-VIO)[21],該系統(tǒng)使用低頻的GPS測量數(shù)據(jù)融合相機IMU 數(shù)據(jù),作者提出一種在線標定的方法對于外參、時間偏移以及對傳感器噪聲具有魯棒性的參考幀初始化步驟。香港大學張富團隊提出了一種快速、穩(wěn)健且通用的激光慣性里程計框架[22]。創(chuàng)新之處是不提取特征直接將原始點配準到地圖,而這使得環(huán)境中的細微特征能夠被使用.
3.2 仿生導(dǎo)航
仿生導(dǎo)航作為一種多學科交叉的新興學科。動物行為學和生理學的研究成果對新型科技領(lǐng)域如計算機、通信領(lǐng)域一直有促進推動作用。Hao 結(jié)合了昆蟲復(fù)眼結(jié)構(gòu)和人類視覺器官結(jié)構(gòu),研制了一種混合型的仿生復(fù)眼系統(tǒng)[23]。國防科技大學胡小平教授團隊研制了六通道點測量式仿生光羅盤[24]。Milford等基于吸引子網(wǎng)絡(luò)模型,構(gòu)建了包含位置細胞和方向細胞模型的RatSLAM算法[25]。
4 結(jié)束語
將視覺導(dǎo)航系統(tǒng)與慣性導(dǎo)航系統(tǒng)融合,互相取長補短,加以耦合的算法使低成本傳感器獲得了高精度和高穩(wěn)定性,讓整個系統(tǒng)邁向小型化、輕量化。視覺慣性導(dǎo)航是一個多學科交叉,對算法和硬件要求都很高的綜合性平臺。其進步必然得益于算法效率的提升與計算機算力的進步。所以仍需要后繼者開闊思路,進一步探索與挖掘。
參考文獻:
[1] 中國科學技術(shù)協(xié)會.面向未來的科技—2020重大科學問題和工程技術(shù)難題解讀[M]. 北京:中國科學技術(shù)出版社,2020.
[2] KELLY J, SUKHATME G S. Visual-inertial sensor fusion: localization, mapping and sensor-to-sensor selfcalibration[J].International Journal of Robotics Research,2011, 30(1): 56-79.
[3] A. J. DAVISON, I. D. Reid, N. D. MOLTON. Mono S L A M : R e a l - t i m e s i n g l e c a m e r a S L A M [ J ] . I E E E Transactions on Pattern Analysis and Machine Intelligence, 2007,29(6):1052-1067.
[4] KLEIN G, MURRAY D. Parallel tracking and mapping for small AR work-spaces [C].// Proc of the 6th IEEE/ACM International Symposium on Mixed and Augmented Reality.Washington DC: IEEE Computer Society, 2007.
[5] CARRILLO L R. LOPEZ A E. Lozano R. et al. Combining stereo vision and inertial navigation system for a quad-rotor UAV [J].Journal of Intelligent and Robotic Systems, 2012,65 (1) : 373-387.
[6] 嚴恭敏,鄧瑀.傳統(tǒng)組合導(dǎo)航中的實用Kalman濾波技術(shù)評述[J].導(dǎo)航定位與授時,2020,7(2): 19-24.
[ 7 ] M O U R I K I S A I , R O U M E L I O T I S S I . A m u l t i - state constraint Kalman filter for vision-aided inertial navigation[C].// Proceedings of IEEE International Conference on Robotics and Automation. Piscataway,USA:IEEE, 2007.
[8] LUPTON T, SUKKARIEH S. Visual-inertial-aided navigation for high-dynamic motion in built environments without initial conditions[J]. IEEE Transactions on Robotics,2012, 28(1) :61-76.
[9] FORSTER C, CARLONE L, DELLAERT F, et al. IMU preintegration on manifold for efficient visual-inertial maximum-a-posteriori estimation[C]. Proceedings of Robotics Science and Systems,2015.
[10] MUR-ARTAL R, TARDOS J D. Visual-inertial monocular SLAM with map reuse[J]. IEEE Robotics and Automation Letters, 2017,2(2):796-803.
[11] CARLOS CAMPOS, RICHARD ELVIRA. An accurate open-source library for visual, visual-inertial and multi-map SLAM[C].IEEE Transactions on Robotics 37(6):1874-1890, Dec.2021.
[12] SHEN S J, MICHAEL N, KUMAR V. Tightly-coupled monocular visual-inertial fusion for autonomous flight of rotorcraft MAVs[C].IEEE International Conference on Robotics and Automation. Piscataway, USA:IEEE2015:5303-5310. DOI: 10.1145/3065386.
[13] SEMMA ABDELILLAH, HANNAD YAACOUB et al. Writer identification using deep learning with FAST key points and Harris corner detector[J].Expert Systems With Applications,2021,184.
[14] PAN Z T, WEN Z W. Analysis of image registration a l g o r i t h m RANSA C a n d i t s impr o v e d a l g o r i t h m [ J ] .I OP C o n f e r e n c e Se r i e s : Ea r t h a n d En v i r o n m e n t a l Science,2021(1):783.
[15] ALEX K, ILYA S, GEOFFREY E H. Image net classification with deep convolutional neural networks[J]. Communications of The ACM. 2017.
[16] A.LAVIN, S.GRAY. Fast algorithms for convolutional neural networks[C].// Proceedings of Computer Vision and Pattern Recognition (CVPR), 2016.
[17] ZHAN H, C.S.WEERASEKERA, J.W.BIAN. Visual odometry revisited: what should be learnt?[C].International Conference on Robotics and Automation (ICRA), 2020.
[18] LI C, S.L.WASLANDER. Towards end-to-end learning of visual inertial odometry with an EKF[C].Conference on Computer and Robot Vision (CRV), 2020:190-197.
[19] CLARK R, WANG S, WEN H, et al. VINet: visual inertial odometry as a sequence to sequence learning problem[C].Proceedings of International Conference on Artificial Intelligence, 2017.
[20] CHEN C, ROSA S, MIAO Y, et al. Selective sensor fusion for neural visual inertial odometry[C].Proceedings of Computer Vision and Pattern Recognition (CVPR), 2019.
[21] LEE W, K. ECKENHOFF. Intermittent GPS-aided VIO: online initialization and calibration[C].International Conference on Robotics and Automation (ICRA), 2020.
[22] XU W, CAI Y. FAST-LIO2: fast direct Li DAR-inertial odometry[C].Transactions on Robotics. DOI: 10.1109.
[23] HAO Q, WANG Z, CAO J, et al. A hybrid bionic image sensor achieving FOV extension and foveated imaging[J]. Sensors, 2018, 18(4):1042.
[24] XIAN Z, HU X, LIAN J, et al. A novel angle computation and calibration algorithm of bio-inspired sky-light polarization navigation sensor[J].Sensors,2014,14(9):17068-17088.
[25] MILFORD M J, WYETH G F. Mapping a suburb with a single camera using a biologically inspired SLAM system[J].IEEE Transactions on Robotics, 2008, 24(5):1038-1053.
[26] S.W.CHEN et al. SLOAM: semantic Lidar odometry and Mapping for Forest Inventory[J]. Robotics and Automation Letters, 2020.
[27] WANG H, XUE C, ZHOU Y et al. Visual semantic localization based on HD map for autonomous vehicles in urban scenarios. International Conference on Robotics and Automation (ICRA), 2021.
(本文來源于《電子產(chǎn)品世界》雜志2023年2月期)
更多信息可以來這里獲取==>>電子技術(shù)應(yīng)用-AET<<
