
摘要開發(fā)一種生物運(yùn)動(dòng)微慣性測(cè)量裝置,以基于ARM7的LPC2129為核心處理單元,采用MEMS陀螺和MEMS加速度計(jì)為測(cè)量傳感器。該裝置實(shí)現(xiàn)了對(duì)SPC-III機(jī)器魚尾鰭拍動(dòng)參數(shù)的精確測(cè)量,為活體魚尾鰭拍動(dòng)參數(shù)測(cè)量實(shí)驗(yàn)打下了基礎(chǔ)。
關(guān)鍵詞微慣性測(cè)量 LPC2129 MEMS器件 尾鰭拍動(dòng)
在仿生推進(jìn)機(jī)理的研究中,精確測(cè)量魚類尾鰭拍動(dòng)參數(shù)對(duì)于魚類仿生推進(jìn)機(jī)理研究及工程應(yīng)用具有重要的意義;然而,目前研究者大多采用分析高速攝像機(jī)拍攝的圖像獲得參數(shù)的觀測(cè)方法。這種方法受到環(huán)境與設(shè)備的限制,結(jié)果精確度較差。本設(shè)計(jì)是一種基于MEMS器件的生物運(yùn)動(dòng)微慣性測(cè)量裝置。利用該裝置實(shí)現(xiàn)了對(duì)SPC-III機(jī)器魚尾鰭拍動(dòng)參數(shù)的精確測(cè)量,為國內(nèi)首次利用MEMS器件進(jìn)行的活體魚尾鰭拍動(dòng)參數(shù)測(cè)量實(shí)驗(yàn)打下了基礎(chǔ),為機(jī)器魚仿生推進(jìn)設(shè)計(jì)理論提供支撐。
1 設(shè)計(jì)要求和系統(tǒng)結(jié)構(gòu)
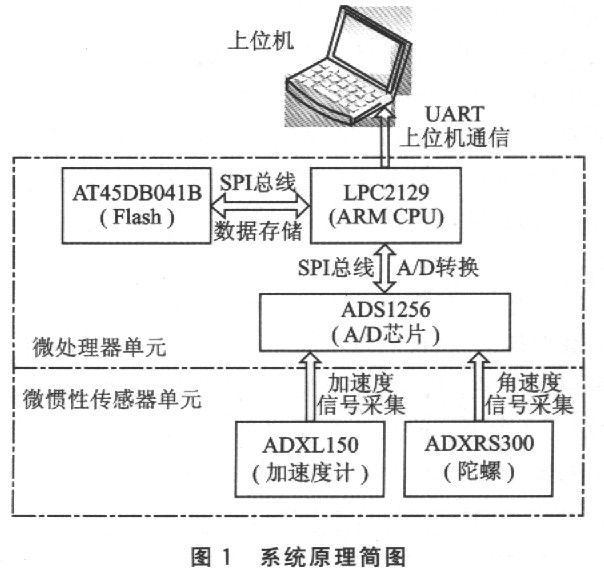
根據(jù)活體魚類的生物特征和實(shí)驗(yàn)本身的特點(diǎn),微慣性測(cè)量裝置應(yīng)該滿足下列設(shè)計(jì)要求:體積小,質(zhì)量輕,功耗低,采集頻率和采集精度高,防水密封性能良好。為了實(shí)現(xiàn)這些需求,微慣性測(cè)量裝置的硬件由兩部分組成:①微處理器單元;②微慣性傳感器單元。微處理器單元主要包括微處理器、A/D轉(zhuǎn)換芯片和Flash。微處理器作為核心單元,通過SPIl口連接A/D轉(zhuǎn)換芯片完成數(shù)據(jù)采集,通過SPIO口連接Flash完成數(shù)據(jù)存儲(chǔ),通過串口與上位機(jī)通信。微慣性傳感器單元是由MEMS加速度計(jì)和MEMS陀螺所組成的,完成加速度與角速度的原始信息采集任務(wù)。采集的原始信息經(jīng)過A/D轉(zhuǎn)換處理后,寫入Flash芯片中保存,或通過串口直接發(fā)送至上位機(jī)進(jìn)行處理。系統(tǒng)原理簡(jiǎn)圖如圖l所示。
2 微處理器單元
2.1 LPC2129處理器
本裝置既要求微處理器具有一定的處理能力又要求功耗低、體積小,所以選用Philips公司的LPC2129。LPC2129基于一個(gè)支持實(shí)時(shí)仿真和跟蹤的16/32位ARM7TDMI-SCPU,并帶有16 KB片內(nèi)SRAM和256KB嵌入的高速片內(nèi)Flash存儲(chǔ)器。LPC2129具有LQFP64的較小封裝、極低的功耗、多個(gè)32位定時(shí)器、4路10位ADC、9個(gè)外部中斷、最多可達(dá)46個(gè)GPIO等。
在LPC2129的軟件設(shè)計(jì)上,未采用ARM上常用的uC/OS-II或uClinux操作系統(tǒng),而是使用前后臺(tái)式的定時(shí)中斷結(jié)構(gòu)。這種前后臺(tái)式的定時(shí)中斷結(jié)構(gòu)更適于實(shí)時(shí)性要求很高的控制系統(tǒng),可以保證控制回路延遲均在一個(gè)設(shè)計(jì)確定的范圍內(nèi),并且各個(gè)模塊問優(yōu)先級(jí)關(guān)系十分明確,使用起來較為方便。
2.2 A/D轉(zhuǎn)換采集芯片ADSl256
A/D轉(zhuǎn)換芯片采用美國TI公司的24位串行模/數(shù)轉(zhuǎn)換器ADSl256。其可提供高達(dá)23位的無噪聲精度,數(shù)據(jù)速率最高可達(dá)30 ksps。ADSl256采用四線制SPI通信方式,與LPC2129的SPIl接口相連,可以靈活方便地進(jìn)行通信。
ADS1256采用多通道循環(huán)采集的工作方式。在數(shù)據(jù)準(zhǔn)備信號(hào)DRDY提示可以提取數(shù)據(jù)后,首先將當(dāng)前的采集通道變?yōu)橄乱粋€(gè)采集通道,開始新的采集轉(zhuǎn)換,然后再馬上提取A/D轉(zhuǎn)換寄存器中的數(shù)據(jù)(這時(shí)的數(shù)據(jù)其實(shí)是上一輪轉(zhuǎn)換好的數(shù)據(jù))。這種方式在實(shí)現(xiàn)提取數(shù)據(jù)的同時(shí)進(jìn)行新數(shù)據(jù)的采集轉(zhuǎn)換,是一種高效率的工作方式。
2.3 Flash芯片AT45DB041B
Flashl選用Atmel公司的可編程串行存取芯片AT45DB041B。主存儲(chǔ)單元分為2048頁,每頁264字節(jié);具有2個(gè)264字節(jié)靜態(tài)隨機(jī)存儲(chǔ)器作為數(shù)據(jù)緩沖器。
AT45DB04lB與LPC2129的SPI0接口相連,采集的數(shù)據(jù)首先寫入Flash的緩沖區(qū)2中,再將緩沖區(qū)里的數(shù)據(jù)寫入Flash的主存頁面進(jìn)行保存,待離線的數(shù)據(jù)分析處理。
3 微慣性傳感器單元
微慣性測(cè)量裝置的MEMS傳感器單元由微機(jī)械陀螺和微加速度計(jì)組成,可精確測(cè)量載體的一個(gè)軸向角速度信息和一個(gè)軸向加速度信息。
3.1 ADXRS300單角速度陀螺儀
ADXRS300是美國模擬器件公司生產(chǎn)的基于MEMS技術(shù)的角速度傳感器。ADXRS300采用+5V電源供電,測(cè)量偏航角速度的范圍是±300rad/s,靈敏度為5mV/(rad·s-1),零位輸出電壓為2.5V。通過外部電阻和電容可分別設(shè)定測(cè)量角速度的范圍、帶寬及零位輸出電壓。采用BGA-32封裝技術(shù),外圍尺寸僅為7mm×7mm×3mm,重量僅0.5g。
設(shè)被測(cè)量的角速度為αv,單位為(°)/s;輸出電壓為Uo,單位為mV;靈敏度K為5mV/(°)·s-1,零位輸出電壓為2.5V,則有關(guān)系式:
3.2 ADXLl50單軸加速度計(jì)
ADXL150是美國模擬器件公司生產(chǎn)的基于MEMS技術(shù)的單軸微加速度傳感器。ADXL150的主要性能特點(diǎn):零位輸出偏置電壓為Us/2,測(cè)量范圍為±50g,靈敏度系數(shù)為38mV/g,非線性度0.2%,零加速度漂移為O.2g;4~6V供電均可工作;功耗很低,靜態(tài)電流只有1.8~3.5mA。
設(shè)被測(cè)量的加速度為av,單位為g;輸出電壓為Uo,單位為mV;靈敏度為K,單位為mV/g;電源電壓為Vs,單位為mV,則有關(guān)系式:
4 速度、角度、位移的測(cè)量原理
角速度與加速度信息經(jīng)過積分計(jì)算處理后,可以得到角度、速度、位移等信息,故該裝置在可測(cè)量載體角速度與加速度信息的基礎(chǔ)上,能夠?qū)崿F(xiàn)載體的多種運(yùn)動(dòng)狀態(tài)信息的測(cè)量。
設(shè)采樣周期為T,v(k)為kT時(shí)刻的速度,x(k)為kT時(shí)刻的位移,a(k)為kT時(shí)刻的加速度,a(k)為加速度的連續(xù)真值,則有下列求解速度的積分公式:
區(qū)間[kT,(k+1)T]內(nèi)所包的面積。己知加速度在kT、(k+1)T時(shí)刻的采樣值為a(k)和a(k+1)可以把加速度a(t)在時(shí)間區(qū)間[kT,(k+1)T]內(nèi)所包圍的形狀近似為一矩形或梯形,采用梯形更精確一點(diǎn),如圖2所示。
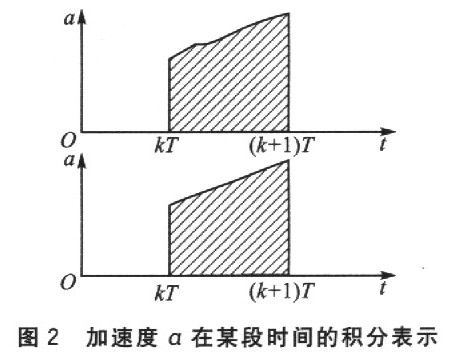
因而上式可以近似為:
已知A/D采樣周期為t,在某時(shí)刻T1時(shí)載體的角速度為w1,線加速度為a1,線速度為v1。經(jīng)過一個(gè)采樣周期t后,在T1+t時(shí)刻載體的角速度為w2,線加速度為a2,線速度為v2,在該采樣周期t中載體轉(zhuǎn)過的角度為α,載體的位移為s,則有:
通過積分計(jì)算即可得到載體的角度、速度、位移等信息。
5 應(yīng)用
5.1 系統(tǒng)集成
微慣性測(cè)量裝置由處理器單元模塊和傳感器單元模塊組成。兩模塊通過板問總線連接,相錯(cuò)放置,以最大限度地利用空間,達(dá)到微小化的尺寸要求。裝置采用7.2V鋰電池供電。最終封裝后的裝置重量僅為25g。
采用NI公司的LabWindows/CVI軟件開發(fā)了上位機(jī)數(shù)據(jù)處理軟件。數(shù)據(jù)處理軟件讀取微慣性測(cè)量裝置采集的速度信息,生成速度/角度,位移曲線,得到載體的擺角、振幅值。
5.2 SPC-III機(jī)器魚尾鰭拍動(dòng)參數(shù)測(cè)量實(shí)驗(yàn)
利用該微慣性測(cè)量裝置對(duì)北京航空航天大學(xué)機(jī)器人研究所ITM實(shí)驗(yàn)室開發(fā)的SPC-III機(jī)器魚進(jìn)行了機(jī)器魚尾鰭拍動(dòng)參數(shù)的測(cè)量實(shí)驗(yàn)。微慣性測(cè)量裝置安裝于機(jī)器魚尾鰭尾柄處,測(cè)量裝置的采集頻率設(shè)定為1kHz。SPC-III機(jī)器魚以1Hz頻率穩(wěn)定拍動(dòng)情況下,采集的數(shù)據(jù)經(jīng)上位機(jī)數(shù)據(jù)處理軟件處理,可得到SPC-III機(jī)器魚的尾鰭拍動(dòng)參數(shù):拍動(dòng)頻率1Hz,擺角幅度41.70°,振幅97.368mm,最大角速度124.264(°)/s。角速度曲線如圖3、圖4所示。
由表1可知,測(cè)量數(shù)據(jù)與理論設(shè)計(jì)數(shù)值相差不大。造成誤差的可能原因:陀螺與加速度計(jì)本身存在誤差偏值,其中包括零位誤差和動(dòng)態(tài)誤差等;機(jī)器魚尾鰭拍動(dòng)機(jī)構(gòu)不是非常精密,存在偏差。
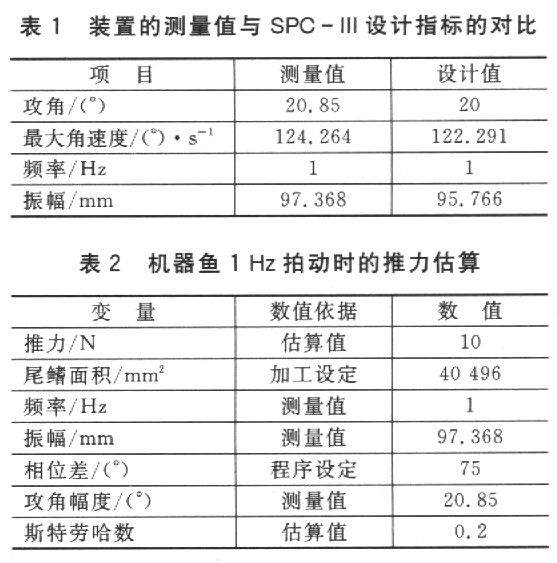
根據(jù)魚類尾鰭推力的估算方法,估算得到SPC-III機(jī)器魚以1 Hz頻率拍動(dòng)時(shí)尾鰭產(chǎn)生的平均推力為10 N,如表2所列。
SPC-III機(jī)器魚采用的兩關(guān)節(jié)并聯(lián)機(jī)構(gòu)尾鰭推進(jìn)器可以產(chǎn)生幾十牛的推力,實(shí)際推力與估算推力基本符合,初步驗(yàn)證了基于理想推進(jìn)器理論和動(dòng)量定理的尾鰭推力估算方法。在不具備水洞模型試驗(yàn)、CFD水動(dòng)力計(jì)算仿真的條件下,利用該方法能夠快速、簡(jiǎn)便地得到尾鰭推力的估計(jì)值,或反解尾鰭的運(yùn)動(dòng)參數(shù)。這種推力估算方法已經(jīng)成功地運(yùn)用于北京航空航天大學(xué)ITM實(shí)驗(yàn)室SPC系列機(jī)器魚的設(shè)計(jì)和實(shí)驗(yàn)工作中。
結(jié)語
利用一種基于MEMS器件的微慣性測(cè)量裝置,可進(jìn)行SPC-III機(jī)器魚尾鰭拍動(dòng)參數(shù)的精確測(cè)量。微慣性測(cè)量裝置體積小,質(zhì)量輕,功耗低,可得到載體的加速度、角速度、速度、位移、角度等運(yùn)動(dòng)信息,可應(yīng)用于生物運(yùn)動(dòng)測(cè)量、體育運(yùn)動(dòng)測(cè)量、人體健康監(jiān)測(cè)等多種領(lǐng)域。