
摘 要:本文提出了一種基于FPAG芯片的控制系統(tǒng)設計方案。系統(tǒng)中利用FPGA狀態(tài)機高效地控制ADC進行信號采集。在FPGA中搭建的模糊控制器通過對勵磁電流的連續(xù)調節(jié),實現(xiàn)了恒速、恒轉矩和恒流等控制策略。
引言
電渦流緩速器的工作原理基于電磁感應理論。作為一種輔助制動裝置,其減少了主制動裝置的機械摩擦,既提高了壽命,又提高了車輛行駛的安全性、經(jīng)濟性和舒適性,越來越受到汽車制造廠家的青睞。但是,由于汽車領域對實時性要求較高,且模糊控制算法涉及到頻繁的多字節(jié)數(shù)據(jù)的乘除運算,而FPGA在實現(xiàn)算法方面具有巨大的優(yōu)勢,因此本文將基于FPGA進行設計。另外,本文結合基于FPGA的32位精簡指令軟核Nios編程,能很好地解決實時性與控制靈活性之間的矛盾。
節(jié)能型電渦流緩速器
目前大部分電渦流緩速器利用蓄電池或自帶發(fā)電機來產生勵磁電流,這兩種方法在緩速時都不能最優(yōu)化地將車輛所具有的動能轉化為剎車能量。
本系統(tǒng)根據(jù)電渦流緩速器制動力矩的大小對自發(fā)電機和蓄電池進行調度,電渦流緩速器制動力矩公式如下:
這里,lg為氣隙間距; d為鐵心直徑;R1為勵磁線圈中心點的半徑;Np為磁極對數(shù); N為勵磁線圈繞組匝數(shù);I為勵磁線圈繞組電流;r為轉子盤電阻率;mr為轉子盤相對磁導率;w為轉子角速度。
當車速較大時,自發(fā)電機在一定電壓下的輸出電流大于I,將一部分電能用于制動,剩下的電能儲存到蓄電池;當車速較慢時,自發(fā)電機在一定電壓下的輸出電流小于I,則從蓄電池輸出電流到繞組線圈產生勵磁電流,從而最大限度地利用能源。
基于FPGA的電渦流緩速器控制系統(tǒng)
為了提升系統(tǒng)可靠性和靈活性,本控制器根據(jù)功能需求進行模塊化設計,主要包括ADC0809控制、NIOS處理器、模糊控制器、電源控制、PWM、LCD顯示等模塊,系統(tǒng)結構如圖1所示。
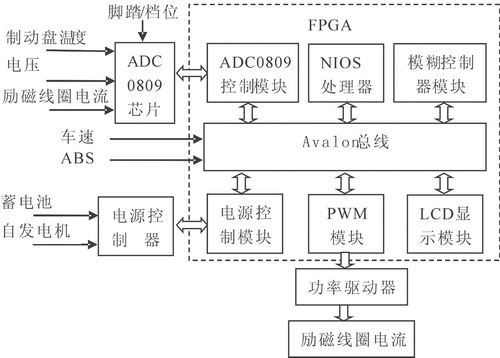
圖1 電渦流緩速器控制系統(tǒng)結構
系統(tǒng)首先由ADC0809控制模塊控制ADC進行各種信號,如溫度、電壓等信號的采集,然后通過Avalon總線把數(shù)據(jù)傳輸?shù)侥:刂破鳌㈦娫纯刂频饶K。電源控制模塊根據(jù)車速會對蓄電池和自發(fā)電機進行能量調度,實現(xiàn)最大限度的節(jié)能;模糊控制器模塊根據(jù)恒速、恒流等控制策略,計算出用于控制PWM占空比的參數(shù),實現(xiàn)勵磁電流的調節(jié)。
ADC0809控制模塊
信號采集是系統(tǒng)實現(xiàn)閉環(huán)控制的重要環(huán)節(jié),它的好壞關系到整個系統(tǒng)的性能。采用FPGA控制ADC的方式能有效降低外界干擾對采樣造成的影響,提高可靠性。另外,利用FPGA狀態(tài)機產生的時序控制ADC時,控制周期短、速度快,能提高整個系統(tǒng)的實時性。
使用狀態(tài)機控制ADC0809芯片采樣,包括時序控制和數(shù)據(jù)的讀取。首先,狀態(tài)機輸出兩路信號先后控制引腳ale和start,一旦start有效,狀態(tài)信號EOC即變?yōu)榈碗娖剑硎具M入轉換狀態(tài),狀態(tài)機通過不斷檢測ADC0809引腳EOC的電平來判斷轉換是否結束。若EOC為高電平表示轉換結束,狀態(tài)機輸出信號使引腳OE由低電平變?yōu)楦唠娖剑詈笞x取轉換好的數(shù)據(jù),主要Verilog代碼如下。
always @ ( EOC ,state )
begin case ( state )
st0 :begin ale <= #1 1'b0; start <= #1 1'b0; OE <= #1 1'b0; state <=#1 st1; end
st1 :begin ale <= #1 1'b1; start <= #1 1'b0; OE <= #1 1'b0; state <=#1 st2; end
st2 :begin ale <= #1 1'b0; start <= #1 1'b1; OE <= #1 1'b0; state <=#1 st3; end
st3 :begin ale <= #1 1'b0; start <= #1 1'b0; OE <= #1 1'b0;
state<=(EOC==1'b1)? #1 st3:st4; end
st4 :begin ale <= #1 1'b0; start <= #1 1'b0; OE <= #1 1'b0;
state<=(EOC==1'b0)? #1 st4:st5; end
st5 :begin ale <= #1 1'b0; start <= #1 1'b0; OE <= #1 1'b1; state <=#1 st6; end
st6 :begin ale <= #1 1'b0; start <= #1 1'b0; OE <= #1 1'b1; state <=#1 st0; end
default : begin ale <= #1 1'b0; start <= #1 1'b0; OE <= #1 1'b0; state <=#1 st0; end
endcase end
模糊控制器模塊
電渦流緩速器是一個非線性系統(tǒng)、強耦合、模型較復雜的對象。由于常規(guī)PID控制不具備在線調整參數(shù)的功能,所以不適于勵磁電流與車速呈非線性關系的系統(tǒng)控制。而模糊理論具有很強的非線性建模能力,能完成復雜系統(tǒng)的非線性映射功能,將模糊推理機制引入到測控系統(tǒng)中,實現(xiàn)對電渦流緩速器的最佳控制,以滿足實際的行車情況,控制器原理圖如圖2所示。

圖2 模糊控制器原理圖
從原理圖可以看出,本模糊控制器采用了二維模糊調節(jié)的方式,以改善系統(tǒng)的動態(tài)性能,即模糊控制器的輸入為給定值與測量值偏差e和偏差變化率芿=ek-ek-1所對應的兩個模糊控制集,經(jīng)量化因子量化后,得到對應的量化等級,其量化等級分別表示為{-7、-6、-5、-4、 -3、-2、-1、0、1、2、3、4、5、6、7}。控制決策表是經(jīng)離線模糊控制推理運算,并結合系統(tǒng)的實際運行進行調整、修改得到的,但它僅反映常規(guī)模糊控制的控制規(guī)則,不能保證系統(tǒng)的動、靜態(tài)特性在大范圍內最優(yōu)。因此,為改善模糊控制器的性能,根據(jù)系統(tǒng)的誤差和誤差變化等信息,對控制器實行在線調整,實際輸出的控制量為決策表值與比例因子的乘積。比例因子的選取規(guī)則如下:當e和芿較大時,系統(tǒng)主要是減少誤差,加快動態(tài)過程,應取較大值;當e和芿較小時,系統(tǒng)接近穩(wěn)定值,應取較小值。最后,按此原則并結合實際經(jīng)驗得到比例因子表。
根據(jù)上面的分析,利用Verilog HDL語言設計出aul運算模塊和rom存儲模塊,另外由Quartus II軟件的LPM設計乘法器lpm_mult0模塊,如圖3所示。aul模塊首先根據(jù)輸入值in_a[7..0]和in_b[7..0]進行求差、除法等運算得到e和芿的值,并乘上各自的量化因子得到量化等級E和艵,然后根據(jù)E和艵與控制策略表和比例因子表的對應關系得到查表地址;rom模塊存儲了控制策略表U和比例因子表GU,根據(jù)aul模塊傳遞過來的地址查找U和GU表,然后將結果輸出到乘法器模塊,并計算出PWM的調節(jié)增量,從而改變PWM的占空比,實現(xiàn)對勵磁電流的調節(jié)。
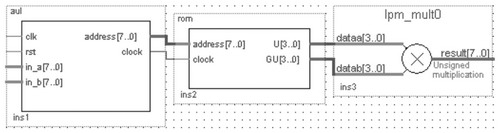
圖3 模糊控制器頂層模塊電路原理圖
基于Nios的主控程序
Nios處理器是整個系統(tǒng)的中樞,是各控制模塊通訊的橋梁。Nios處理器通過Avalon總線將采集進來的各種參數(shù),如車速、ABS、電壓等,按需要傳遞到各控制模塊,控制模塊再把相關的運算結果返回給主控程序,以實現(xiàn)相關的控制策略,如圖4所示。
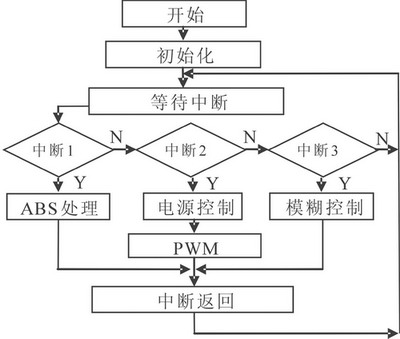
圖4 主控程序流程圖
結語
本課題選用Cyclone II系列中的EP2C5Q208C8芯片,它具有4608個邏輯單元,內部RAM達119808位,內部乘法器可達26單元,最大用戶I/O達143個,這些豐富的資源能夠滿足電渦流緩速器控制器各模塊的設計需求,邏輯單元的使用率為65%,RAM使用率為45%。本設計方法提高了系統(tǒng)的集成度和可靠性并且降低了功耗,F(xiàn)PGA的可重構性大大方便了系統(tǒng)將來的升級,而不需要改變原來的電路布線。■