
無(wú)刷直流電機(jī)" title="無(wú)刷直流電機(jī)">無(wú)刷直流電機(jī)具有無(wú)電刷和換相火花,體積小,低噪聲等諸多優(yōu)點(diǎn),廣泛應(yīng)用在當(dāng)今的控制系統(tǒng)中。目前對(duì)無(wú)刷直流電機(jī)的控制主要由單片機(jī)和DSP實(shí)現(xiàn)。但是其外圍電路復(fù)雜,對(duì)系統(tǒng)的穩(wěn)定性和可靠性有較大的影響。近年來(lái),基于可編程門(mén)陣列(FPGA)的硬件設(shè)計(jì)技術(shù)已經(jīng)成為一種全新的設(shè)計(jì)思想。與專(zhuān)用集成電路(ASIC)不同的是,F(xiàn)PGA本身只是標(biāo)準(zhǔn)的單元陣列,沒(méi)有一般集成電路所具有的功能,但用戶(hù)可以根據(jù)需要,通過(guò)專(zhuān)門(mén)的布局布線(xiàn)工具對(duì)其內(nèi)部進(jìn)行重新編程,在最短的時(shí)間內(nèi)設(shè)計(jì)出自己專(zhuān)用的集成電路,從而提高產(chǎn)品的競(jìng)爭(zhēng)力。由于它以純硬件的方式進(jìn)行并行處理,而且不占用CPU的資源,所以可以使系統(tǒng)達(dá)到很高的性能。本文用純硬件的方式設(shè)計(jì)實(shí)現(xiàn)了無(wú)刷直流電機(jī)驅(qū)動(dòng)控制器" title="控制器">控制器,包括PI調(diào)節(jié)算法,外圍電路簡(jiǎn)單,實(shí)時(shí)控制速度快,系統(tǒng)穩(wěn)定可靠。
1 無(wú)刷直流電機(jī)的工作原理
無(wú)刷直流電機(jī)主要由電動(dòng)機(jī)本體、位置傳感器和電子開(kāi)關(guān)線(xiàn)路三部分組成。其基本工作原理就是借助反映轉(zhuǎn)子位置的位置信號(hào),通過(guò)驅(qū)動(dòng)電路,驅(qū)動(dòng)逆變電路的功率開(kāi)關(guān)元件,使電樞繞組依一定順序通電,從而在氣隙中產(chǎn)生旋轉(zhuǎn)磁場(chǎng),拖動(dòng)永磁轉(zhuǎn)子旋轉(zhuǎn)。
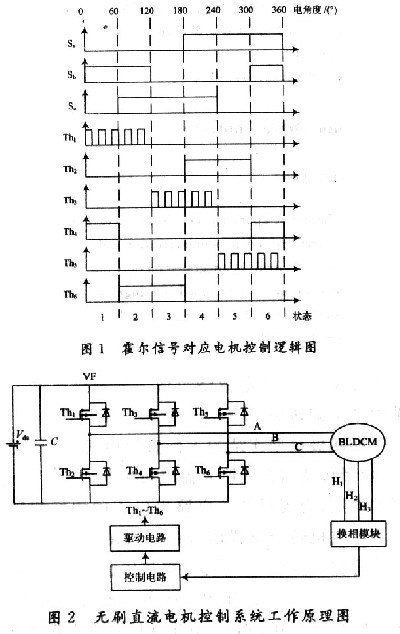
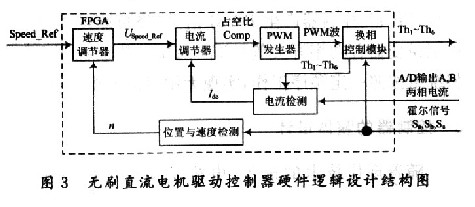
三相四極星型連結(jié)的無(wú)刷直流電機(jī)采用兩兩導(dǎo)通方式,位置傳感器在無(wú)刷直流電機(jī)中起著測(cè)定轉(zhuǎn)子磁極位置的作用,為邏輯開(kāi)關(guān)電路提供正確的換相信息。無(wú)刷直流電機(jī)轉(zhuǎn)子位置信號(hào)由3只在相位上差120°的霍爾傳感器(Sa,Sb,Sc)檢測(cè),霍爾傳感器一個(gè)周期內(nèi)的開(kāi)關(guān)信號(hào)有6個(gè)狀態(tài),如圖1所示。無(wú)刷直流電機(jī)控制系統(tǒng)工作原理如圖2所示,其中VF為逆變器,根據(jù)霍爾信號(hào),F(xiàn)PGA控制器產(chǎn)生PWM信號(hào),經(jīng)過(guò)驅(qū)動(dòng)電路放大送至逆變器各功率開(kāi)關(guān)管(Th1~Th6),從而控制電機(jī)各相繞組按照一定順序工作,實(shí)現(xiàn)無(wú)刷直流電機(jī)正常運(yùn)轉(zhuǎn)。
2 控制器的整體設(shè)計(jì)
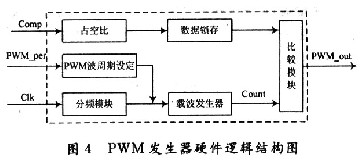
隨著現(xiàn)代技術(shù)的進(jìn)步,電機(jī)驅(qū)動(dòng)對(duì)控制器在快速性、實(shí)時(shí)性和準(zhǔn)確性方面提出了更高的要求,使得高性能的FPGA在控制器開(kāi)發(fā)領(lǐng)域有了廣闊的應(yīng)用前景。系統(tǒng)使用FPGA XC3S1500完成無(wú)刷直流電機(jī)控制系統(tǒng),采用轉(zhuǎn)速、電流雙閉環(huán)控制策略調(diào)節(jié)速度。圖3為無(wú)刷直流電機(jī)驅(qū)動(dòng)控制器硬件邏輯設(shè)計(jì)結(jié)構(gòu)圖,其中各模塊均采用硬件邏輯設(shè)計(jì)完成,模塊之間使用串行連接,霍爾信號(hào)Sa,Sb,Sc經(jīng)過(guò)換相控制模塊輸出6路開(kāi)關(guān)管信號(hào),同時(shí)經(jīng)過(guò)位置與速度檢測(cè)模塊計(jì)算得到速度反饋轉(zhuǎn)速n并與速度給定Speed_Ref一起經(jīng)過(guò)速度調(diào)節(jié)器調(diào)節(jié)得到電流環(huán)給定Uspeed-Ret,控制A/D轉(zhuǎn)換輸出A相和B相電流經(jīng)過(guò)電流檢測(cè)模塊輸出母線(xiàn)電流Idc并與速度調(diào)節(jié)器輸出值Uspeed_Ref一起經(jīng)過(guò)電流調(diào)節(jié)器輸出占空比信號(hào)Comp用以調(diào)節(jié)PWM波的寬度,達(dá)到調(diào)速的目韻。以數(shù)字電路的方式實(shí)現(xiàn)無(wú)刷直流電機(jī)的控制,使得系統(tǒng)的穩(wěn)定性得到了很大的提高。
3 控制器模塊設(shè)計(jì)
3.1 高精度PWM發(fā)生器
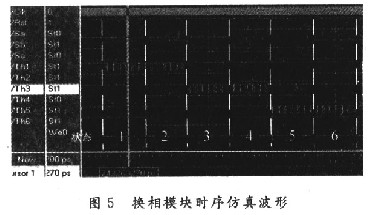
采用自然采樣法產(chǎn)生PWM波形,其結(jié)構(gòu)圖如圖4所示,因?yàn)樽匀徊蓸臃ㄗ钅苷鎸?shí)反映PWM的控制思想,效果最好。該發(fā)生器采用現(xiàn)場(chǎng)可編程門(mén)陣列實(shí)現(xiàn),具有接口簡(jiǎn)單、響應(yīng)速度快、可現(xiàn)場(chǎng)編程等優(yōu)點(diǎn),能夠應(yīng)用于全數(shù)字化控制。載波發(fā)生器采用了鋸齒波作為PWM載波,從電路的角度來(lái)講設(shè)計(jì)鋸齒波發(fā)生器會(huì)比設(shè)計(jì)三角波發(fā)生器使用更少的組合邏輯資源,有利于時(shí)序約束到較高的頻率;比較模塊不同于普通的純組合邏輯比較器,通過(guò)例化:FPGA的底層子元件,在該比較器內(nèi)部插入了一級(jí)D觸發(fā)器,大大減少了由于數(shù)據(jù)位寬增加而增加組合邏輯延遲;PWM波周期設(shè)定模塊和分頻模塊能夠根據(jù)需要共同改變PWM的頻率,且分頻模塊能夠解決高位寬下過(guò)長(zhǎng)的進(jìn)位鏈帶來(lái)的延遲問(wèn)題。
3.2 換相控制模塊
換相控制模塊根據(jù)三相霍爾信號(hào)的狀態(tài)(見(jiàn)圖1),以組合邏輯的形式輸出六路開(kāi)關(guān)信號(hào)Th1~Th6(設(shè)計(jì)中開(kāi)關(guān)管為低導(dǎo)通),開(kāi)關(guān)管Th1,Th3,Th5接收來(lái)自PWM波發(fā)生器輸出的PWM波,即系統(tǒng)采用半橋調(diào)制方式,其時(shí)序仿真波形如圖5所示,圖中1~6表示了一個(gè)霍爾信號(hào)周期內(nèi)開(kāi)關(guān)管的6個(gè)狀態(tài)(與圖1對(duì)應(yīng))。
3.3 速度調(diào)節(jié)器和電流調(diào)節(jié)器
速度環(huán)和電流環(huán)均采用增量式PI調(diào)節(jié)算法,用FPGA實(shí)現(xiàn)PI調(diào)節(jié)器,即用數(shù)字電路來(lái)實(shí)現(xiàn)PI控制算法,應(yīng)用此硬件算法提高了控制器的可靠性和實(shí)時(shí)性,同時(shí)基本消除計(jì)算機(jī)給控制系統(tǒng)帶來(lái)的影響。PI算法的硬件邏輯結(jié)構(gòu)如圖6所示。
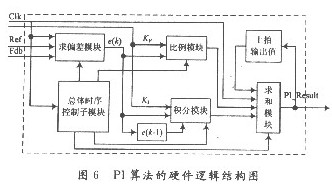
PI算法公式如下:
式中:k為采樣序號(hào),k=O,1,2,…;u(k)為第k次采樣時(shí)刻的輸出值;u(k-1)為第(k-1)次采樣時(shí)刻的輸出值;e(k)為第k次采樣時(shí)刻輸入的偏差值;r(k)為系統(tǒng)給定;c(k)為系統(tǒng)反饋輸入;KP為比列系數(shù);KI為積分系數(shù)。
設(shè)計(jì)中的Clk為時(shí)鐘信號(hào),Ref為給定信號(hào),F(xiàn)db為反饋信號(hào),PI_Result為PI調(diào)節(jié)器輸出,為了與AD反饋結(jié)果匹配,均采用13位有符號(hào)數(shù)表示,KP和KI為PI參數(shù),模塊中的整體運(yùn)算均采用先對(duì)數(shù)據(jù)符號(hào)進(jìn)行判斷,然后再進(jìn)行普通的計(jì)算,運(yùn)算結(jié)果的符號(hào)由以前得出的數(shù)據(jù)符號(hào)確定。時(shí)序控制子模塊用來(lái)控制調(diào)節(jié)器中其他模塊的運(yùn)算順序;求偏差模塊負(fù)責(zé)給定信號(hào)與反饋信號(hào)求差,將結(jié)果輸出給比例模塊和積分模塊;比例模塊實(shí)現(xiàn)比例系數(shù)與本次偏差和上次偏差之間差的乘積,積分模塊實(shí)現(xiàn)積分系數(shù)與本次偏差的乘積;求和模塊在上述模塊輸出有效時(shí)計(jì)算出輸出的偏差量,此偏差量和上次的輸出值求和得到本次調(diào)節(jié)的結(jié)果并輸出。PI調(diào)節(jié)算法被例化于速度調(diào)節(jié)器和電流調(diào)節(jié)器中。輸出結(jié)果限值也在模塊中設(shè)置,若輸出值大于等于系統(tǒng)的限幅值,則調(diào)節(jié)器以限幅值作為本次的輸出值。
3.4 電流檢測(cè)模塊
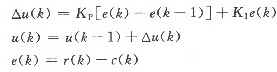
電流反饋檢測(cè)模塊包括電流采樣、濾波模塊和多路選擇器,硬件邏輯結(jié)構(gòu)圖如圖7所示。電流采樣采用ADI公司的AD7862AR-2,AD7862是高速的12位并行AD芯片,最高采樣頻率為250 KSPS,內(nèi)部參考電壓為+2.5 V,工作電壓為+5 V,有A和B兩個(gè)通道,每個(gè)通道又有兩個(gè)輸入端(VA1,VA2與VB1,VB2),兩個(gè)輸入端可以同時(shí)進(jìn)行轉(zhuǎn)換,系統(tǒng)使用A通道的兩個(gè)輸入端分別對(duì)A相和B相電流進(jìn)行采樣。AD控制器輸出信號(hào)Ia_Fin和Ib_Fin分別為A相和B相電流,經(jīng)過(guò)濾波電路輸出給多路選擇器,多路選擇器根據(jù)開(kāi)關(guān)管狀態(tài)判斷此刻的母線(xiàn)電流是A相電流還是B相電流以及電流的正負(fù)關(guān)系,從而能夠準(zhǔn)確采樣瞬時(shí)電流,提高控制精度。
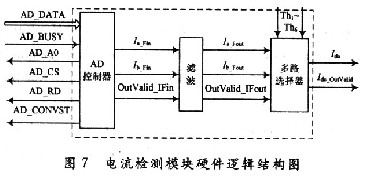
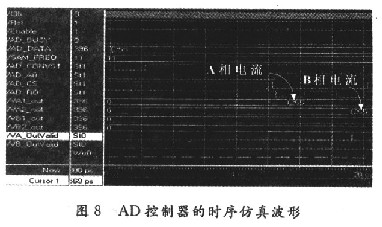
根據(jù)AD7862采樣時(shí)序圖,AD控制器控制AD芯片工作,可以通過(guò)AD控制器調(diào)節(jié)AD的采樣頻率,最大到250KSPS,本模塊采樣頻率設(shè)置100 KSPS進(jìn)行驗(yàn)證。其仿真波形符合AD7862的采樣時(shí)序圖,并通過(guò)了測(cè)試。圖8為AD控制器的時(shí)序仿真波形。
3.5 位置和速度檢測(cè)模塊
位置信號(hào)通過(guò)三個(gè)霍爾傳感器得到,每一個(gè)霍爾傳感器都會(huì)產(chǎn)生180°脈寬的輸出信號(hào),如圖9所示。Sa,Sb,Sc分別表示三相霍爾信號(hào),Clk為高頻時(shí)鐘脈沖。電機(jī)測(cè)速分為M法、T法和M/T法,T法測(cè)速適用于低速段,本設(shè)計(jì)采用T法測(cè)速。通過(guò)對(duì)霍爾信號(hào)Sa的每個(gè)周期用一個(gè)計(jì)數(shù)器對(duì)主時(shí)鐘脈沖進(jìn)行計(jì)數(shù),通過(guò)除法器計(jì)算轉(zhuǎn)速,計(jì)算公式如下:
Speed_out=60×f0/Z×Count_reg
式中:f0為系統(tǒng)時(shí)鐘;Count_reg為霍爾信號(hào)一個(gè)周期內(nèi)的脈沖計(jì)數(shù)值;Z為電機(jī)轉(zhuǎn)一圈輸出的霍爾信號(hào)個(gè)數(shù),因?yàn)槭俏鍖?duì)極電機(jī),所以Z=5。
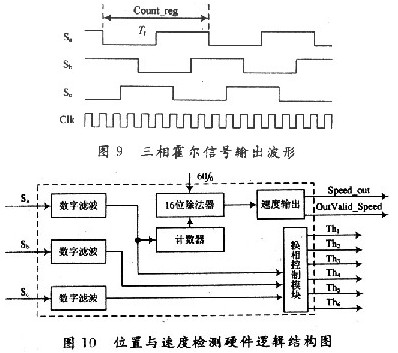
圖10為位置與速度檢測(cè)硬件邏輯結(jié)構(gòu)圖,三相霍爾信號(hào)通過(guò)數(shù)字濾波模塊后,以霍爾信號(hào)Sa為條件的計(jì)數(shù)器啟動(dòng)計(jì)數(shù),作為16位除法器的分母輸入,經(jīng)過(guò)除法運(yùn)算,在下一個(gè)霍爾信號(hào)Sa周期內(nèi)輸出速度計(jì)算結(jié)果Speed_out及模塊輸出有效信號(hào)OutValid_Speed。運(yùn)算時(shí)間與除法器的內(nèi)部結(jié)構(gòu)有關(guān)。
4 實(shí)驗(yàn)結(jié)果
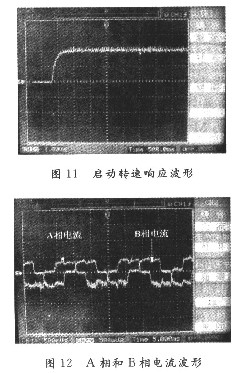
采用額定功率PN=300 W,額定電壓UN=220 V,額定轉(zhuǎn)速nN=3000 r/min,額定電流IN=1.6 A,額定轉(zhuǎn)矩TN=O.96 Nm的無(wú)刷直流電機(jī)進(jìn)行實(shí)驗(yàn),整個(gè)實(shí)驗(yàn)系統(tǒng)還包括以FPGA為主的控制單元、功率電路和測(cè)功機(jī)負(fù)載實(shí)驗(yàn)平臺(tái),實(shí)驗(yàn)中采用轉(zhuǎn)速、電流雙閉環(huán)調(diào)節(jié)方式。電機(jī)給定轉(zhuǎn)速1000 r/min時(shí),空載啟動(dòng)響應(yīng)波形如圖11所示,調(diào)節(jié)時(shí)間為300 ms,穩(wěn)態(tài)性能良好;利用測(cè)功機(jī)對(duì)系統(tǒng)進(jìn)行加載測(cè)試,負(fù)載0.3 Nm時(shí)A相和B相電流波形如圖12所示,充分證明了該控制器的正確性,也說(shuō)明電機(jī)運(yùn)行穩(wěn)定。
5 結(jié)語(yǔ)
采用FPGA硬件可編程邏輯器件,以純硬件的方式實(shí)現(xiàn)無(wú)刷直流電機(jī)的控制,對(duì)無(wú)刷直流電機(jī)控制的結(jié)果表明,該電路能有效地對(duì)無(wú)刷直流電機(jī)進(jìn)行雙閉環(huán)控制。設(shè)計(jì)特點(diǎn)是控制電機(jī)的所有外圍電路包括PI調(diào)節(jié)算法均采用FPGA實(shí)現(xiàn),真正實(shí)現(xiàn)電機(jī)的SOPC" title="SOPC">SOPC控制,系統(tǒng)實(shí)時(shí)性高、可靠性強(qiáng)。