
1 引言
目前,中高壓變頻器的產(chǎn)品中,電機(jī)調(diào)速控制策略多采用V/F控制或矢量控制(又稱磁場(chǎng)定向控制),而直接轉(zhuǎn)矩控制(Direct Torque Control,簡(jiǎn)稱DTC)方面的研究與應(yīng)用較少,實(shí)現(xiàn)難度較大。主要原因之一在于多電平拓?fù)涞拈_關(guān)管數(shù)目眾多,造成傳統(tǒng)DTC所需要的開關(guān)向量表非常復(fù)雜。另外,傳統(tǒng)DTC采用滯環(huán)比較器,逆變器開關(guān)頻率不固定,難以數(shù)字實(shí)現(xiàn),生成多電平波形較為困難,電流、轉(zhuǎn)矩脈動(dòng)較大。
實(shí)現(xiàn)DTC等高性能調(diào)速策略需要檢測(cè)電機(jī)的轉(zhuǎn)速,但速度傳感器的安裝增加了系統(tǒng)的復(fù)雜性、成本和維護(hù)要求,降低了可靠性和魯棒性。
2 多電平直接轉(zhuǎn)矩控制的難點(diǎn)
傳統(tǒng)的直接轉(zhuǎn)矩控制采用磁鏈與轉(zhuǎn)矩的砰—砰控制,根據(jù)它們的變化與定子磁鏈所在的空間位置直接選擇電壓空間矢量的開關(guān)狀態(tài),獲得快速的轉(zhuǎn)矩響應(yīng)[2]。但是其實(shí)際轉(zhuǎn)矩在滯環(huán)比較器的上下限內(nèi)脈動(dòng),開關(guān)頻率也不固定。一種改進(jìn)方案是將空間矢量調(diào)制(SVM)方法與DTC相組合,對(duì)轉(zhuǎn)矩進(jìn)行閉環(huán)PI調(diào)節(jié),以電壓空間矢量調(diào)制模塊取代開關(guān)向量表,產(chǎn)生PWM波控制逆變器的開關(guān)狀態(tài),可使開關(guān)頻率恒定,轉(zhuǎn)矩脈動(dòng)也大幅減小[3]。
然而,在多電平領(lǐng)域,逆變器的基本空間矢量數(shù)目眾多,對(duì)于每相n個(gè)H橋級(jí)聯(lián)單元即 級(jí)級(jí)聯(lián)的多電平逆變器,其基本空間矢量數(shù)目為(2n+1) 3個(gè)。每相3單元的高壓變頻器基本空間矢量多達(dá)343個(gè),而對(duì)于每相6單元的高壓變頻器,這個(gè)數(shù)目達(dá)到了2197個(gè)。如此繁多的基本空間矢量使空間矢量選擇算法變得非常復(fù)雜。另外,空間矢量的選擇要考慮功率單元的開關(guān)負(fù)荷均衡,這就對(duì)算法提出了更高的要求。因此,在電平數(shù)較多的情況下,空間矢量算法實(shí)現(xiàn)困難,也難以滿足實(shí)時(shí)控制的要求[4]。
為克服上述問題,在級(jí)聯(lián)多電平中采用錯(cuò)時(shí)采樣空間矢量調(diào)制(Sampe-Time-Staggered Space Vector Modulation,簡(jiǎn)稱STS-SVM)策略,能大大降低空間矢量選擇的復(fù)雜度,并且能夠?qū)崿F(xiàn)開關(guān)負(fù)荷的自動(dòng)均衡,執(zhí)行效率高,易于實(shí)現(xiàn)無速度傳感器DTC等高性能實(shí)時(shí)控制。
3 錯(cuò)時(shí)采樣SVM策略

圖1 組合變流器拓?fù)?/p>
組合變流器與3相H橋級(jí)聯(lián)型多電平逆變器在拓?fù)渖暇哂修D(zhuǎn)換等效關(guān)系[6]。將圖2(a)中的兩級(jí)多電平變流器經(jīng)變換后可等效為圖2(b)中的一級(jí)3相H橋結(jié)構(gòu),等效的開關(guān)管在兩幅圖中以相同的編號(hào)表示,即一級(jí)H橋中左橋臂的開關(guān)管和右橋臂的開關(guān)管可分別等效為多電平變流器的兩個(gè)3相6橋臂單元。這樣就可將STS-SVM調(diào)制法用于一級(jí)3相H橋。具體方法是用STS-SVM方法得出圖2(a)中的開關(guān)管的驅(qū)動(dòng)信號(hào),去驅(qū)動(dòng)圖2(b)中相同編號(hào)的開關(guān)管。由于兩級(jí)變流器中N=2,因此兩個(gè)單元的采樣時(shí)刻錯(cuò)開Ts/2。轉(zhuǎn)化到圖2(b)中,相當(dāng)于對(duì)一級(jí)3相H橋逆變器左橋臂的6個(gè)開關(guān)管和右橋臂的6個(gè)開關(guān)管分別進(jìn)行相同的幅度和頻率調(diào)制比下的兩電平空間矢量調(diào)制,并且要使兩者參考電壓的采樣時(shí)刻錯(cuò)開Ts/2。
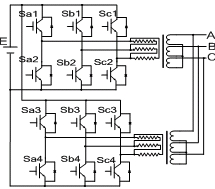
(a)兩級(jí)多電平變流器

(b) 一級(jí)三相H橋逆變器
圖2 兩級(jí)組合變流器與一級(jí)三相H橋逆變器的等效關(guān)系
根據(jù)上述思想進(jìn)行擴(kuò)展,對(duì)于n級(jí)H橋級(jí)聯(lián)的逆變器,可以等價(jià)為2n個(gè)單元的組合變流器,相鄰的兩級(jí)H橋單元同一側(cè)橋臂的采樣時(shí) 刻應(yīng)相互錯(cuò)開Ts/2n。
由上述分析可以得到在n級(jí)H橋級(jí)聯(lián)型逆變器中應(yīng)用錯(cuò)時(shí)采樣調(diào)制策略的實(shí)現(xiàn)方法。只要根據(jù)傳統(tǒng)兩電平空間矢量算法得出某一級(jí)H橋中三個(gè)同側(cè)橋臂的驅(qū)動(dòng)信號(hào),系統(tǒng)中其它各開關(guān)管的驅(qū)動(dòng)信號(hào)即可通過相應(yīng)的延時(shí)得到。兩電平空間矢量算法在主控制器中進(jìn)行,延時(shí)可通過在主控制器外增加硬件單元來實(shí)現(xiàn)。這樣就大大減輕了主控制器的負(fù)擔(dān),能夠適應(yīng)快速實(shí)時(shí)控制的要求。
STS-SVM中,系統(tǒng)總體輸出電壓矢量的安排是自動(dòng)完成的,由兩電平空間矢量算法得出的各個(gè)橋臂觸發(fā)波形自身具有對(duì)稱性和均衡性,因此總體開關(guān)負(fù)荷也是均衡的。
4 STS-SVM無速度傳感器DTC系統(tǒng)
相對(duì)于普通的多電平空間矢量算法,STS-SVM控制算法簡(jiǎn)單,開關(guān)負(fù)荷均衡,使得主控制器實(shí)現(xiàn)復(fù)雜的無速度傳感器直接轉(zhuǎn)矩控制等算法成為可能。
圖3為基于STS-SVM的級(jí)聯(lián)多電平無速度傳感器DTC控制系統(tǒng)的總體結(jié)構(gòu)。圖中速度調(diào)節(jié)器、轉(zhuǎn)矩調(diào)節(jié)器、磁鏈調(diào)節(jié)器均為比例積分調(diào)節(jié),轉(zhuǎn)矩調(diào)節(jié)器需要在PI調(diào)節(jié)前采用限幅,以免過大的轉(zhuǎn)矩誤差造成過電流沖擊。系統(tǒng)總采用STS-SVM模塊產(chǎn)生PWM波控制逆變器的開關(guān)狀態(tài),摒棄了復(fù)雜的開關(guān)矢量表。另外,由于未使用滯環(huán)比較,系統(tǒng)的采樣頻率是固定的,更易于數(shù)字實(shí)現(xiàn)。
圖3 基于STS-SVM的無速度傳感器DTC系統(tǒng)結(jié)構(gòu)
4.1 STS-SVM調(diào)制的多電平逆變器
此處,多電平逆變器為圖4(a)所示的三級(jí)H橋級(jí)聯(lián)型拓?fù)洹TS-SVM模型中的驅(qū)動(dòng)信號(hào)的產(chǎn)生通過兩電平空間矢量算法得出的調(diào)制波與各個(gè)開關(guān)管對(duì)應(yīng)的三角波進(jìn)行比較來獲得,如圖4(b)所示。各個(gè)三角載波存在一定的移相關(guān)系,這樣就等效地實(shí)現(xiàn)了采樣周期的相互錯(cuò)開。

(a) 三級(jí)級(jí)聯(lián)多電平逆變器主電路

(b)STS-SVM驅(qū)動(dòng)信號(hào)產(chǎn)生單元
圖4 級(jí)聯(lián)多電平主電路與PWM產(chǎn)生單元
4.2 磁鏈與轉(zhuǎn)矩觀測(cè)
定子磁鏈的估計(jì)大體上可以分為三種模型,即u-i模型,i-n模型,u-n模型。其中u-i模型中磁鏈表達(dá)式為
 (1)
(1)
其中,,us,is,Rs分別為定子磁鏈、電壓、電流值與定子電阻值,可見,u-i模型觀測(cè)定子磁鏈無需轉(zhuǎn)速信息,唯一所需了解的電動(dòng)機(jī)參數(shù)是定子電阻Rs,因此十分適合在此處應(yīng)用。
![]() (2)
(2)
其中,Pn為電機(jī)的極對(duì)數(shù)。
在Matlab/Simulink中建立磁鏈與轉(zhuǎn)矩觀測(cè)的模型,如圖5所示。

圖5 定子磁鏈與轉(zhuǎn)矩觀測(cè)模型
4.3 速度估計(jì)
基于模型參考自適應(yīng)系統(tǒng)(Model Reference Adaptive System,MRAS)的轉(zhuǎn)速辨識(shí)實(shí)現(xiàn)較為方便,且具有對(duì)轉(zhuǎn)子電阻變化的完全不敏感性,電機(jī)參數(shù)變化對(duì)轉(zhuǎn)速估算的影響也較小。轉(zhuǎn)子磁鏈的電壓模型與電機(jī)轉(zhuǎn)速無關(guān),而轉(zhuǎn)子磁鏈的電流模型與電機(jī)轉(zhuǎn)速有關(guān),因此選擇轉(zhuǎn)子磁鏈的電壓模型作為參考模型,而選擇轉(zhuǎn)子磁鏈的電流模型作為可調(diào)模型[7]。
由于在磁鏈觀測(cè)中已經(jīng)估算出定子磁鏈,因此參考模型可以用定子磁鏈表示:
![]() (3)
(3)
其中,![]() 為轉(zhuǎn)子磁鏈,Lm為定轉(zhuǎn)子互感, Lr為轉(zhuǎn)子電感,
為轉(zhuǎn)子磁鏈,Lm為定轉(zhuǎn)子互感, Lr為轉(zhuǎn)子電感,![]() 為定子瞬時(shí)電感, Ls為定子電感。
為定子瞬時(shí)電感, Ls為定子電感。
可調(diào)模型為:
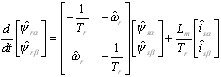 (4)
(4)
其中Tr=Lr/Rr為轉(zhuǎn)子時(shí)間常數(shù),Rr為轉(zhuǎn)子電阻,![]() 為轉(zhuǎn)子角速度。
為轉(zhuǎn)子角速度。

圖6 利用轉(zhuǎn)子磁鏈估計(jì)轉(zhuǎn)速的MRAS方案
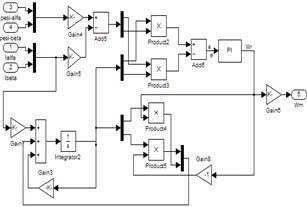
圖7 轉(zhuǎn)速估計(jì)模型
定義廣義狀態(tài)誤差![]() ,利用Popov超穩(wěn)定準(zhǔn)則可推導(dǎo)出自適應(yīng)率形式為:
,利用Popov超穩(wěn)定準(zhǔn)則可推導(dǎo)出自適應(yīng)率形式為:
![]() (5)
(5)
其中,Kp、Ki分別為比例和積分系數(shù), 是取之于的誤差信息,
![]() (6)
(6)
由式(6)可以看出,磁鏈誤差信息比例于轉(zhuǎn)子磁鏈?zhǔn)噶?和 之間的角偏差αr, 經(jīng)過PI調(diào)節(jié)器可產(chǎn)生速度信號(hào)![]() ,這個(gè)調(diào)整信號(hào)會(huì)使可調(diào)模型估計(jì)的
,這個(gè)調(diào)整信號(hào)會(huì)使可調(diào)模型估計(jì)的![]() 與參考模型的
與參考模型的![]() 趨于一致,令轉(zhuǎn)子磁鏈誤差 能夠收斂于零,也就會(huì)使轉(zhuǎn)速估計(jì)值
趨于一致,令轉(zhuǎn)子磁鏈誤差 能夠收斂于零,也就會(huì)使轉(zhuǎn)速估計(jì)值![]() 逐步逼近于真實(shí)值
逐步逼近于真實(shí)值![]() ,其原理如圖6所示。圖7為利用轉(zhuǎn)子磁鏈估計(jì)轉(zhuǎn)速的MRAS的Matlab/Si mulink模型。
,其原理如圖6所示。圖7為利用轉(zhuǎn)子磁鏈估計(jì)轉(zhuǎn)速的MRAS的Matlab/Si mulink模型。
5 仿真結(jié)果及分析
在Matlab/Simulink中建立了整個(gè)系統(tǒng)的仿真模型。其中,電機(jī)模型采用軟件自帶的兩級(jí)三相異步感應(yīng)電機(jī)模型,參數(shù)為:額定功率PN =3730W,額定線電壓UN =380V,額定頻率fN =50Hz,轉(zhuǎn)子電阻Rr=1.083Ω,定子電阻Rs=1.115Ω,定子、轉(zhuǎn)子電感Ls= Lr=0.2097H,定轉(zhuǎn)子互感Lm=0.2037H,轉(zhuǎn)動(dòng)慣量J=0.02kgg㎡。逆變器每級(jí)直流電源電壓為104V,采樣周期Ts=952µs。
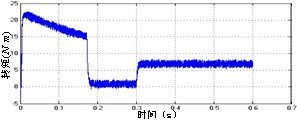
仿真中,給定轉(zhuǎn)速![]() ,電機(jī)空載啟動(dòng),在0.3s處突加6Ngm的負(fù)載。各個(gè)變量的仿真波形如圖8所示。
,電機(jī)空載啟動(dòng),在0.3s處突加6Ngm的負(fù)載。各個(gè)變量的仿真波形如圖8所示。
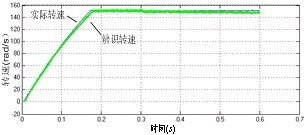
(a)辨識(shí)轉(zhuǎn)速與實(shí)際轉(zhuǎn)速
(b)轉(zhuǎn)矩動(dòng)態(tài)相應(yīng)

(c)定子磁鏈 (d)電流
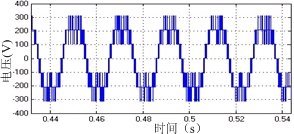
(e)相電壓
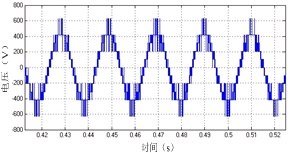
(f)線電壓
圖8 系統(tǒng)仿真波形
由仿真波形可以看出,電機(jī)啟動(dòng)后0.2s,系統(tǒng)基本進(jìn)入穩(wěn)定狀態(tài);辨識(shí)轉(zhuǎn)速能較好地估計(jì)與跟蹤實(shí)際轉(zhuǎn)速;相電壓輸出7電平;線電壓輸出13電平;電流波形良好;穩(wěn)態(tài)時(shí)磁鏈與轉(zhuǎn)矩脈動(dòng)都比較小;啟動(dòng)過程中定子磁鏈能很快達(dá)到給定值,并保持圓形;啟動(dòng)時(shí)轉(zhuǎn)矩迅速達(dá)到限幅值(23Ngm),之后逐漸回落到空載穩(wěn)定值,加載時(shí)動(dòng)態(tài)響應(yīng)特性良好。
6 結(jié)論