
隨著電子技術(shù),、計(jì)算機(jī)應(yīng)用技術(shù)和EDA技術(shù)的不斷發(fā)展,,利用FPGA進(jìn)行數(shù)字系統(tǒng)的開發(fā)已被廣泛應(yīng)用于通信、航天,、醫(yī)療電子、工業(yè)控制等領(lǐng)域,,F(xiàn)PGA成為當(dāng)今硬件設(shè)計(jì)的首選方式之一,。PC/104是一種專門為嵌入式控制而定義的工業(yè)控制總線,以其獨(dú)特的堆棧式結(jié)構(gòu),、低功率等優(yōu)點(diǎn),,得到了廣泛的應(yīng)用。作為主流的現(xiàn)場(chǎng)總線,,工業(yè)控制局域網(wǎng)CAN(Controller Area Network)總線抗干擾能力強(qiáng),,易于組網(wǎng),具有非常廣闊的應(yīng)用前景,。獨(dú)特的PC/104總線與CAN總線的結(jié)合,,進(jìn)一步拓寬了CAN總線的應(yīng)用領(lǐng)域。
1基于FPGA的CAN核設(shè)計(jì)
本設(shè)計(jì)采用了Altera公司的Cyclone III系列FPGA EP3C25,,開發(fā)平臺(tái)采用了Altera公司的Quartus II軟件,。CAN核的設(shè)計(jì)以SJA1000功能結(jié)構(gòu)為基礎(chǔ),。
CAN核的功能框圖如圖1所示。該CAN總線控制器IP核,,遵循CANbus 2.0標(biāo)準(zhǔn),,其功能和寄存器操作與SJA1000兼容。IP核采用VHDL編碼,,并采用容錯(cuò)設(shè)計(jì),,可抑制存儲(chǔ)性器件的數(shù)據(jù)位翻轉(zhuǎn),大大提高了IP核的可靠性,。CAN核可在FPGA中實(shí)現(xiàn),,也可以實(shí)現(xiàn)為ASIC。其中包含3個(gè)主要模塊:寄存器組(can_registers),,位時(shí)序邏輯(can_btl),,位流處理器(can_bsp)。
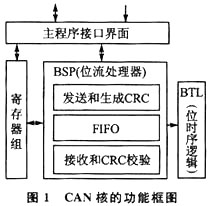
寄存器組(CAN Register):外部微處理器可以通過地址直接訪問這些寄存器,。發(fā)送數(shù)據(jù)時(shí),,微處理器將要發(fā)送的數(shù)據(jù)寫入發(fā)送緩沖器,置位命令寄存器的發(fā)送請(qǐng)求位來啟動(dòng)發(fā)送,。接收到數(shù)據(jù)后,,核心控制器將其存在接收緩沖器,并通知位控制器將其取走,。同時(shí),,CAN寄存器中還有1個(gè)64字節(jié)的接收FIFO,可以1次存儲(chǔ)至少2個(gè)數(shù)據(jù)幀,。
位時(shí)序邏輯(BTL):用來監(jiān)視CAN總線并處理與CAN總線相關(guān)的位時(shí)序,。在消息的開始處,當(dāng)位時(shí)序邏輯檢測(cè)到總線上由隱性位(recessive)到顯性位(dominant)的跳變時(shí),,就會(huì)將其內(nèi)部邏輯同步到位流,,稱之為硬同步;隨后,,在接收消息的過程中,,檢測(cè)到隱性位到顯性位的跳變時(shí),便會(huì)重同步到位流,,稱之為軟同步,。位時(shí)序邏輯還要根據(jù)總線定時(shí)寄存器0和總線定時(shí)寄存器1的值來決定每個(gè)位周期采樣點(diǎn)的位置,以補(bǔ)償傳輸延遲和相位漂移所造成的誤差,;同時(shí),,根據(jù)總線定時(shí)寄存器1的設(shè)置采取相應(yīng)的采樣模式(單次采樣或3次)對(duì)總線上的數(shù)據(jù)采樣。
位流處理器(BSP):根據(jù)其實(shí)現(xiàn)的功能分為3個(gè)模塊:數(shù)據(jù)接收模塊,、數(shù)據(jù)發(fā)送模塊和錯(cuò)誤處理模塊,。數(shù)據(jù)接收模塊將從位時(shí)序邏輯送過來的采樣數(shù)據(jù)去除位填充后送到移位寄存器進(jìn)行串并轉(zhuǎn)換,,之后對(duì)并行數(shù)據(jù)進(jìn)行CRC校驗(yàn),在消息接收完時(shí)發(fā)送應(yīng)答信號(hào),,表示接收無誤,。最后將接收到的消息的特征碼與驗(yàn)收屏蔽寄存器的內(nèi)容進(jìn)行比較,以決定是否將接收的消息寫入接收FIFO,。數(shù)據(jù)接收模塊將要發(fā)送的數(shù)據(jù)組成幀并進(jìn)行CRC計(jì)算,,之后送入移位寄存器進(jìn)行并串轉(zhuǎn)換,然后將串行數(shù)據(jù)編碼(位填充)后送到總線上,。錯(cuò)誤監(jiān)視模塊根據(jù)協(xié)議規(guī)范中描述的錯(cuò)誤監(jiān)視機(jī)制檢測(cè)系統(tǒng)錯(cuò)誤,,并設(shè)置相應(yīng)的寄存器,通知設(shè)備控制器,。模塊根據(jù)協(xié)議描述的12種錯(cuò)誤監(jiān)視規(guī)則,,在適當(dāng)情況下對(duì)計(jì)數(shù)器進(jìn)行加、減或清除,??刂破鞲鶕?jù)這兩個(gè)計(jì)數(shù)器的值以及錯(cuò)誤限制寄存器的值來決定自己的故障狀態(tài):錯(cuò)誤激活(Error Active),錯(cuò)誤認(rèn)可(Error Passire)或總線關(guān)閉(Bus off On),。
2硬件電路設(shè)計(jì)
根據(jù)系統(tǒng)的總體設(shè)計(jì)方案,,因?yàn)楝F(xiàn)有的CAN總線收發(fā)器最大的工作頻率為1 MHz,在提高CAN的通信速度后,,現(xiàn)有的CAN總線收發(fā)器就不能滿足需要了,,因此改用RS485收發(fā)器。由于RS485收發(fā)器是差分傳輸,,不能完成通信卡的自發(fā)自收功能,,因此需要外置的CAN Hub。另外,,要進(jìn)行光纖傳輸,,要完成光的邏輯總線結(jié)構(gòu),也需要外置Hub,。因此,本硬件設(shè)計(jì)分為CAN通信板的設(shè)計(jì)和CAN Hub的設(shè)計(jì)兩部分,。
(1)CAN通信板硬件電路設(shè)計(jì)
CAN通信板的核心器件是FPGA,,同時(shí)完成“雙光雙電”通信,硬件通信板結(jié)構(gòu)如圖2所示,。
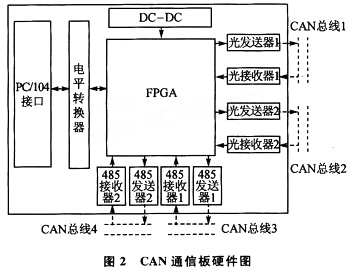
作為PC/104系統(tǒng)的模塊,,要接在PC/104總線上,所以要在數(shù)據(jù),、地址,、控制總線上與PC/104標(biāo)準(zhǔn)規(guī)定的總線標(biāo)準(zhǔn)一致,。
本設(shè)計(jì)要進(jìn)行四冗余設(shè)計(jì),在設(shè)計(jì)中要添加4個(gè)CAN核,,選用Altera公司Cyclone II系列的FPGA EP3C25,。
由于PC/104的工作電壓為5 V,而FPGA的工作電壓為3.3 V,,因此在PC/104和FPGA之間要加入1個(gè)電平轉(zhuǎn)換器74LVC245來保護(hù)FPGA,。
(2)光收發(fā)電路
本系統(tǒng)的高速光發(fā)射器采用HFBR-1414低功耗高速光發(fā)射器件,其光發(fā)射波長為820 nm,。此發(fā)射器能夠與以下4種光纖配合使用:50/125 μm,、62.5/125 μm、100/140 μm,、200 μm(HCS),。HFBR-1414采用了雙鏡片的光學(xué)系統(tǒng),光發(fā)射效率高,,當(dāng)驅(qū)動(dòng)電流為60 mA時(shí),,在50/125 μm光纖上可得到-15 dBm的光功率。光接收器采用HFBR-2412,,其內(nèi)部集成了光電二極管,、直流電路和開集電極的肖特基晶體管。HFBR-2412光接收器能與光發(fā)射器HFBR-1414及50/125 μm,、62.5/125 μm,、100/140 μm、200 μm(HCS)的光纖配合使用,,最高通信速率可達(dá)5 MB,。由于采用了開集電極電路,此接收器兼容TTL及CMOS電平,。該電路的通信距離最遠(yuǎn)可達(dá)1.7 km,。
為提高CAN通信板的抗震性,抗干擾性等綜合性能,,采用了雙面布線設(shè)計(jì),。該通信板尺寸規(guī)格嚴(yán)格按照PC/104板的要求做。
(3)冗余設(shè)計(jì)及CAN Hub設(shè)計(jì)
該通信板設(shè)計(jì)了4路冗余,,工作時(shí)只有1路CAN通道進(jìn)行工作,,采用高位片選的方式進(jìn)行工作通道的選擇,其片選模塊在FPGA內(nèi)部設(shè)計(jì)完成,。
(4)GAN Hub的設(shè)計(jì)
由于本系統(tǒng)采用“雙光雙電”四冗余的電路設(shè)計(jì),,為提高通信速度,采用485收發(fā)器代替標(biāo)準(zhǔn)的CAN收發(fā)器,。光是“點(diǎn)對(duì)點(diǎn)”的傳輸,,485收發(fā)器是差分傳輸,,在形式上都無法構(gòu)成總線式結(jié)構(gòu)。因此,,引入CAN Hub來對(duì)信號(hào)進(jìn)行處理,,在邏輯上達(dá)到總線式的結(jié)構(gòu)。
3軟件設(shè)計(jì)
CAN通信板的正常工作離不開強(qiáng)大的軟件支持,,本系統(tǒng)中控制部分的核心采用PC/104嵌入式計(jì)算機(jī)系統(tǒng),。PC/104嵌入式計(jì)算機(jī)擁有可以和PC機(jī)媲美的強(qiáng)大功能,CAN通信板軟件部分的開發(fā)和設(shè)計(jì)就是在PC/104計(jì)算機(jī)上完成的,,采用C語言進(jìn)行設(shè)計(jì),。C語言具有通用性、高效性和實(shí)時(shí)性,,能滿足儀器的實(shí)時(shí)性要求,。在設(shè)計(jì)過程中采用了模塊化、結(jié)構(gòu)化的設(shè)計(jì)方法,,把軟件按功能分成若干個(gè)模塊,,這些模塊既有一定的獨(dú)立性,又有一定聯(lián)系,。每個(gè)模塊的編制要求相對(duì)獨(dú)立,,以便對(duì)各模塊進(jìn)行檢驗(yàn)調(diào)試和修改、維護(hù),。這種框架模式的程序可以保證良好的通用性,、可維護(hù)性、可擴(kuò)展性,、移植性,、互換性和獨(dú)立性。
由于CAN核的內(nèi)部結(jié)構(gòu)和SJA1000一樣,,因此,,開發(fā)時(shí)就像面對(duì)SJA1000一樣,編寫起來簡單方便,。本設(shè)計(jì)采用中斷處理的方式來進(jìn)行任務(wù)的處理,。在中斷到來后進(jìn)行相應(yīng)的處理就可以了。
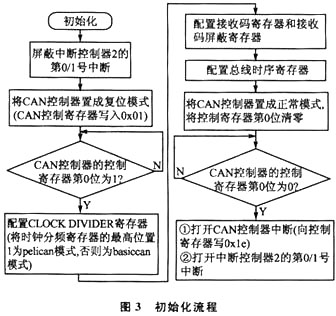
通信板初始化流程如圖3所示,。
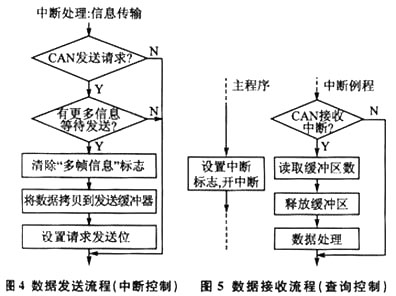
數(shù)據(jù)發(fā)送流程如圖4所示,,數(shù)據(jù)接收流程如圖5所示。
4系統(tǒng)的仿真
采用Modelsim進(jìn)行仿真,。
系統(tǒng)的測(cè)試平臺(tái)(TestBench),例化了模塊can4core和1個(gè)CAN核cantop,,并仿真它們之間的通信,。
本仿真完全按照CAN核正常工作過程進(jìn)行,,仿真過程如下:
①初始化設(shè)置。首先進(jìn)行時(shí)間寄存器的設(shè)置和數(shù)據(jù)格式的設(shè)置,。通過平臺(tái)對(duì)本系統(tǒng)設(shè)計(jì)模塊和CAN核進(jìn)行設(shè)置,。
②同步測(cè)試。包括硬同步測(cè)試和重新同步測(cè)試,。一個(gè)硬同步后,,內(nèi)部的位時(shí)間以同步段重新開始。硬同步使引起硬同步的跳變沿位于重新開始的位時(shí)間同步段之內(nèi),。
③空FIFO測(cè)試(test_empty_fifo_ext),。該測(cè)試通過接收2個(gè)數(shù)據(jù)幀,然后讀取接收緩沖器,,接著清空緩沖器,,再讀取緩沖器,反復(fù)清空和讀取,,看FIFO中的數(shù)據(jù)是否被完全清除,。
④滿FIFO測(cè)試(test_full_fifo_ext)。首先清空寄存器,,然后通過不斷地接收數(shù)據(jù)幀來填滿FIFO并讀取信息,,檢測(cè)是否能正常工作。
⑤總線空閑測(cè)試(bus-off-test),。通過不斷發(fā)送數(shù)據(jù)來使總線處于忙狀態(tài),,致使總線產(chǎn)生錯(cuò)誤,測(cè)試中斷寄存器是否能檢測(cè)到錯(cuò)誤,,以及錯(cuò)誤清除后CAN核能否繼續(xù)正常工作,。
⑥Basic CAN模式發(fā)送幀檢測(cè)。測(cè)試CAN核能否正常發(fā)送幀,。
⑦寄存器測(cè)試,。通過不停地讀寫寄存器,檢測(cè)CAN核寄存器是否正常工作,。
⑧總線上數(shù)據(jù)的傳輸,。仿真過程中重要的一點(diǎn)就是總線上是否能夠正常傳輸數(shù)據(jù)信息。
經(jīng)過仿真可以看到該CAN通信板突破了SJA1000在速度方面的限制,,傳輸速度可達(dá)2 MHz,,有效傳輸速率得到了大幅提高,工作性能良好,。
結(jié)語
本文設(shè)計(jì)的CAN總線通信板完成了PC/104與CAN總線的通信轉(zhuǎn)換,,改變了傳統(tǒng)的應(yīng)用CAN控制器加外部控制器的設(shè)計(jì)方法,在設(shè)計(jì)CAN核的基礎(chǔ)上,將通信板中所有數(shù)字信號(hào)處理部分都放在FPGA內(nèi)部來實(shí)現(xiàn),,使通信速度得到很大提高,。無論是在傳輸速率還是在抗干擾、抗震性等方面,,CAN核應(yīng)用的綜合性能都得到了很大的提高,。