
引言
為徹底消滅超載現(xiàn)象,禁止超載車輛上路,實(shí)現(xiàn)司機(jī)在駕駛室內(nèi)就可知道車輛的載荷情況,而地面稽查人員通過無線通信裝置可隨時(shí)隨地檢測車輛的載荷量,從而有利于制止車輛的超載行為。因此,這里提出一種基于AD7891的車輛稱重采集系統(tǒng)設(shè)計(jì)方案。該系統(tǒng)設(shè)計(jì)采用電容法檢測車輛載荷,并利用車輛本身的板彈簧作為稱重傳感器的彈性體。
2 車輛稱重系統(tǒng)簡介
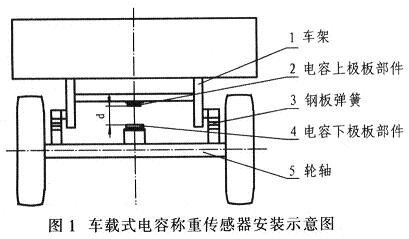
車輛電容稱重裝置安裝在被測車輛上。稱重裝置的核心器件是電容稱重傳感器,電容傳感器的極板安裝在車輛輪軸的中部上方與車廂底(或車架)之間,通過測量車輛板彈簧的形變轉(zhuǎn)換為電容值的變化,得到載荷值。圖1為車載式電容稱重傳感器示意圖。
在車輛稱重系統(tǒng)中,若車輛有前后兩根輪軸,則圖2為車輛稱重系統(tǒng)框圖。前后傳感器將載荷變化轉(zhuǎn)換為電容變化;電容測量電路將電容值轉(zhuǎn)換為電壓值;DSP將傳感器輸出的電壓值進(jìn)行加轉(zhuǎn)換,其數(shù)據(jù)經(jīng)運(yùn)算、處理后,將整車載荷值送至顯示器。由于系統(tǒng)中需采集的數(shù)據(jù)量較大,特別是動態(tài)稱重測量,為了滿足系統(tǒng)的實(shí)時(shí)性需求,車輛稱重采集系統(tǒng)采用AD7891和TMS320LF2407 DSP實(shí)現(xiàn)車輛稱重?cái)?shù)據(jù)采集。

3 系統(tǒng)硬件設(shè)計(jì)
系統(tǒng)采用美國ADI公司的AD7891型A/D轉(zhuǎn)換器,它是一種內(nèi)含輸入多路轉(zhuǎn)換器和采樣保持放大器的12位數(shù)據(jù)采集系統(tǒng)(DAS),輸入模擬信號范圍為-10~+10 V,理論精度指標(biāo)可達(dá)4.88 mV,適合與各種微處理器、控制器以及數(shù)字信號處理機(jī)連接。它和DSP有并行和串行兩種工作模式,并有8個(gè)具有過壓保護(hù)的模擬信號通道,允許過壓值為±17 V,只對1個(gè)通道信號采樣時(shí),最大采樣速率可達(dá)454.5 kS/s。AD7891采用單電源工作,功耗低。非常適用于數(shù)據(jù)采集系統(tǒng)和測試設(shè)備等方面應(yīng)用。因此,該車輛稱重系統(tǒng)采用AD7891完全能夠滿足系統(tǒng)各項(xiàng)要求。在高速采集系統(tǒng)中,AD7891與DSP相結(jié)合通常采用串行或并行方式,利用軟件控制數(shù)據(jù)線方式實(shí)現(xiàn)系統(tǒng)要求的采集速度。AD7891與DSP采用并行方式,使用DSPI/O端口的A、B、C、D、E數(shù)據(jù)和方向控制器實(shí)現(xiàn)AD7891的時(shí)序控制。另外由于DSP的I/O端口電壓為3.3 V,而AD7-891的端口電壓為5 V,當(dāng)DSP的端口只向AD7891的端口發(fā)送信號時(shí).通過DSP的I/O端口直接接至AD7891;但如果從AD7891的端口直接向DSP的端口發(fā)送信號則有可能損壞DSP。因此需要高速雙向電平轉(zhuǎn)換器,這里選用P174LVCC424-5A,由于一片P174LVCC4245A只能處理8位數(shù)據(jù)線,因此需要2片P174LVCC4245A進(jìn)行電平匹配。其硬件連接電路如圖3所示.圖3中DSP對A。D7891的時(shí)序控制完全是通過TMS320LF2407 DSP的I/O端口實(shí)現(xiàn),D[O:11]指向DSP接口。AD7891的CS、WR、CONVST、RD、EOC時(shí)序控制引腳分別與DSP I/O端口的IOPB4、IOPB5、IOPB6、IOPB7、IOPF4相匹配。AD7891引腳和DSP I/O端口通過2片電平轉(zhuǎn)換器P174LVCC4245A連接,其引腳配置如圖3所示。

4 系統(tǒng)軟件設(shè)計(jì)
系統(tǒng)程序流程主要是對采集到的數(shù)據(jù)進(jìn)行誤差分析處理。圖4為車輛稱重?cái)?shù)據(jù)處理程序流程.其中初始化DSP、AD7891和外圍元件,包括設(shè)置堆棧指針,設(shè)置定時(shí)器工作模式并使其能中斷,設(shè)置數(shù)據(jù)存儲器初值及對A/D轉(zhuǎn)換器初始化等。系統(tǒng)上電后,首先執(zhí)行初始化程序。初始化完成后.調(diào)用信號采集和A/D轉(zhuǎn)換程序,分別采集前、后輪軸的電容傳感器輸出信號和車輛加速度傳感器輸出信號。
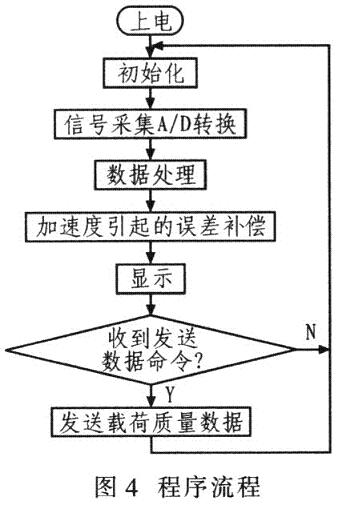
通過圖4看出.程序的關(guān)鍵就是準(zhǔn)確采集到傳感器輸出電壓。為實(shí)現(xiàn)車輛稱重系統(tǒng)的高速采樣,首先分析AD7891的時(shí)序,圖5為AD7891并行工作時(shí)序。
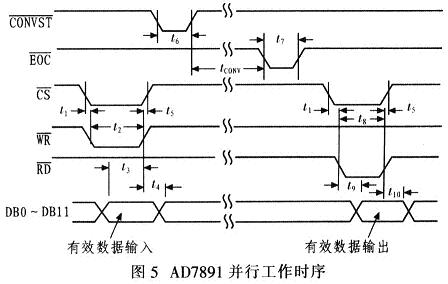
圖5中,t1為從CS到RD/WR的觸發(fā)時(shí)間,t2為寫脈沖寬度,不小于35 ns;t3為寫有效數(shù)據(jù)時(shí)間,不小于25 ns;t4為有效數(shù)據(jù)保持時(shí)間,不小于5 ns;t5為CS到RD/WR的保持時(shí)間,t6為CONVST脈沖寬度時(shí)間,不小于35 ns;t7為EOC脈沖寬度時(shí)間,不小于55 ns;t8為度脈沖寬度,不小于35 ns;t9為RD下降沿之后讀數(shù)據(jù)時(shí)間,不小于25 ns;tCONV為轉(zhuǎn)換時(shí)間,不大于1.6μs。為實(shí)現(xiàn)測控系統(tǒng)的高速實(shí)時(shí)采樣必須合理準(zhǔn)確分配以上各時(shí)間,AD7891的工作時(shí)序全部由DSP的I/O端口實(shí)現(xiàn)。系統(tǒng)DSP主頻時(shí)鐘為30 MHz,采用分頻15 MHz輸出,單周期指令運(yùn)行的時(shí)間為33 ns。用C語言執(zhí)行一個(gè)I/O端口指令,編譯完后,大概需要4個(gè)周期指令時(shí)間。下面是測控系統(tǒng)DSP對通道1采集的C語言程序代碼:

以上程序代碼完全能夠控制圖5所示的AD7891時(shí)序,從而滿足車輛稱重系統(tǒng)對采集系統(tǒng)準(zhǔn)確、實(shí)時(shí)、高速的要求。
5 試驗(yàn)結(jié)果
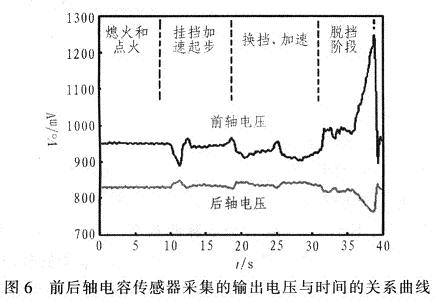
車輛稱重系統(tǒng)試驗(yàn)是在額定載量為500 kg的輕型貨車上進(jìn)行的。試驗(yàn)時(shí)駕駛室乘坐2人,體重共75kg,車廂內(nèi)靠前部均勻擺放沙袋作為載荷,車速最高為40 km/h。圖6記錄了車輛靜止一起步一加速一制動一停止全過程中采集輸出電壓的變化曲線。圖6中時(shí)間段:0~9 s為發(fā)動機(jī)熄火靜止和點(diǎn)火階段,此時(shí),前、后軸采集輸出電壓均無變化:9~18 s為掛擋加速起步階段,此時(shí)加速度明顯增大,前軸傳感器采集輸出電壓降低,后軸傳感器采集輸出電壓升高;以后的18~32 s階段,包括換擋、加速過程,換擋時(shí)車輛滑行,加速度減小,前軸采集輸出電壓升高,后軸輸出電壓降低;從第32 s進(jìn)入脫擋階段,開始制動,加速度急劇減小,前軸采集輸出電壓明顯升高,后軸采集輸出電壓降低,第38 s時(shí)達(dá)到最大峰值點(diǎn)。試驗(yàn)結(jié)果證明,該系統(tǒng)設(shè)計(jì)能夠完成系統(tǒng)對數(shù)據(jù)高速實(shí)時(shí)采集的需求。
6 結(jié)論
車輛稱重采集系統(tǒng)采用DSP的I/O端口讀取AD7891的數(shù)據(jù)。通過對DSP編程完全控制AD7891的時(shí)序,雖然占用大量的DSP I/O端口.但由于TMS320LF2407 DSP I/O端口豐富,因此這種實(shí)現(xiàn)方式完全可行。該裝置結(jié)構(gòu)簡單,成本低廉,不僅能夠滿足車輛的靜態(tài)稱重,而且動態(tài)稱重的精度也高于2%,完全能滿足公路超載檢測要求。