
The Challenge:
開發(fā)一個可用于飛機(jī)配置與組件的動靜力測量、可用于電源設(shè)備的進(jìn)氣測試(即進(jìn)氣兼容性研究)、可用于穩(wěn)定性導(dǎo)數(shù)評估的微震蕩測試,也可用于模擬飛機(jī)失速與尾旋形成的高震蕩與旋轉(zhuǎn)導(dǎo)數(shù)的功能全面的、靈活可靠的測試系統(tǒng)。
The Solution:
利用NI的PXI與SCXI平臺以及LabVIEW實時軟件,開發(fā)一個可靠且高度精確的數(shù)據(jù)采集與控制系統(tǒng)。
"NI LabVIEW幫助我們實現(xiàn)了高達(dá)2 kHz的ESP端口切換速率,并通過縮短風(fēng)洞的整個操作周期為客戶節(jié)省費(fèi)用。我們在壓力測量中實現(xiàn)0.01% FS的精度。"
風(fēng)洞是一種空氣動力學(xué)測試設(shè)備,它用于研究物體周圍的氣流模式并測量作用其上的空氣動力。一個典型的風(fēng)洞包含一個安置飛機(jī)模型的測試部分、一個位于該測試部分之前的壓縮部分與穩(wěn)定部分和一個位于該測試部分之后的擴(kuò)散部分。位于該擴(kuò)散部分的風(fēng)扇提供所需的氣流。這樣的配置準(zhǔn)確地模擬了飛機(jī)與氣流間的相對運(yùn)動。
風(fēng)洞測試中的測量系統(tǒng)通常包含動靜力測量、壓力分布測量和用于依風(fēng)向確定模型方向的位置測量。
系統(tǒng)配置
數(shù)據(jù)采集系統(tǒng)是一個包含有NI SCXI-1125模塊的基于PXI的系統(tǒng),用于接收來自壓力掃描儀的壓力測量結(jié)果。掃描儀中的壓力端口的切換通過NI PXI-6527 完成,同時它也負(fù)責(zé)切換與監(jiān)測系統(tǒng)中隔離閥、蝴蝶閥和球形閥的狀態(tài)。
SCXI-1125用于采集壓力傳感器的輸出以計算馬赫數(shù)。該系統(tǒng)利用NI SCXI-1520 的六個通道采集來自六個張力測量裝置的作用力數(shù)值。一個NI PXI-7344 運(yùn)動控制器板卡控制與運(yùn)動控制板卡接口的模型與漸增編碼器的方向,然后將方向信息回傳至系統(tǒng)。PXI-4472也用于振動與聲壓測量。
系統(tǒng)實現(xiàn)
系統(tǒng)軟件基本分成兩個模塊,校準(zhǔn)模塊與采集模塊。
校準(zhǔn)模塊——軟件利用五點校準(zhǔn)法校準(zhǔn)壓力傳感器、ESP(電子壓力掃描儀)和張力測量裝置平衡。通過軟件完成作用力平衡的端到端校準(zhǔn),以創(chuàng)建校準(zhǔn)矩陣。NI LabVIEW 用于方便校準(zhǔn)的執(zhí)行,并提供非常準(zhǔn)確的結(jié)果。該系統(tǒng)還可以驗證校準(zhǔn)的效果。
在創(chuàng)建新的校準(zhǔn)并通過壓力檢驗驗證校準(zhǔn)效果時所使用的GUI屏幕顯示如圖1 和圖2 所示。

圖1.ESP 校準(zhǔn)屏幕顯示

圖2.經(jīng)過校準(zhǔn)的壓力值的驗證
采集模塊——前面所提及的研究涉及兩個基本的測量,壓力測量和作用力測量。這兩個測量都通過兩階段完成:一階段采集壓力與張力測量裝置平衡的偏移量,另一階段完成實際測量。偏移量將從第二階段的測量中抽取,然后映射至對應(yīng)的工程數(shù)值。
壓力測量
飛機(jī)模型中的速率分布是通過采集來自模型上固定點的壓力測量值所得。這項工作是通過端口與模型中一些固定點相連的電子壓力掃描儀完成的。
在實際采集開始前,軟件控制著維護(hù)流速及將模型引入氣流所需的序列。用戶僅須輸入馬赫數(shù),該軟件便可以控制整個風(fēng)洞。在壓力測量過程中,運(yùn)動控制板卡用于讓模型指向預(yù)設(shè)位置。
NI LabVIEW 幫助我們實現(xiàn)了高達(dá)2 kHz 的ESP 端口切換速率,并通過縮短風(fēng)洞的整個操作周期為客戶節(jié)省費(fèi)用。我們在壓力測量中實現(xiàn)0.01% FS 的精度。圖3 展示了壓力測量窗口。
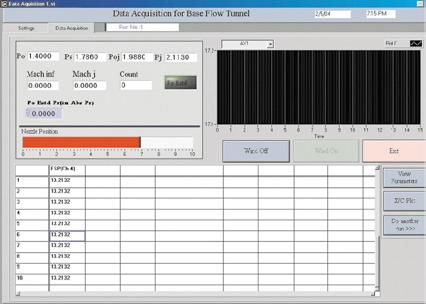
圖3.數(shù)據(jù)采集——壓力測量
作用力測量
一個風(fēng)洞涉及兩種類型的作用力測量,靜力測量和動力測量。靜力測量要求將模型保持在預(yù)先設(shè)定的位置,而動力測量則要求在預(yù)先設(shè)定的曲線上移動模型并采集作用力的數(shù)值。
作用力測量首先涉及模型的偏移量的采集——使模型始終處于預(yù)設(shè)位置或者在預(yù)設(shè)的曲線上移動模型,并采集數(shù)據(jù)。接著,啟動實際序列——順序打開隔離閥、球形閥、蝴蝶閥和壓力調(diào)節(jié)閥,并通過NI DIO 模塊監(jiān)測其狀態(tài)。然后軟件檢驗所設(shè)置的馬赫數(shù)。
一旦達(dá)到了所設(shè)定的馬赫數(shù),軟件將模型推入空氣流中。在靜力測量情況下,模型移動至某個特定的位置,進(jìn)行作用力數(shù)據(jù)采集;然后,模型移動至另一個位置,再次進(jìn)行作用力數(shù)據(jù)采集;如此反復(fù)。對于動力測量,在模型引入氣流中后,啟動第一次采集。
然后,模型旋轉(zhuǎn)至與氣流相同的曲線,并減小閥門。
挑戰(zhàn)在于控制模型的位置并同步采集作用力數(shù)據(jù)和位置數(shù)據(jù)。如果沒有NI運(yùn)動控制板卡和PXI,這項工作將不可能通過單個處理器完成。運(yùn)動控制器中的DSP 處理器幫助我們毫不復(fù)雜地完成了這項工作,并使得這兩項操作相互獨立且同步。
振動與聲壓測量
加速計與PXI-4472 相連,用于測量模型在特定馬赫數(shù)情況下的振動。還通過所連接的麥克風(fēng)采集飛機(jī)模型上的聲壓水平,供震蕩研究使用。
結(jié)論
所開發(fā)的系統(tǒng)為前述空氣動力學(xué)研究提供了極高的靈活性與可靠性。我們能夠?qū)L(fēng)洞控制、模型調(diào)整控制和數(shù)據(jù)集成在一個系統(tǒng),免除了三個系統(tǒng)及其繁雜同步的必要。