
1 引言
近年來,以波動應(yīng)力理論為基礎(chǔ)的樁動測技術(shù)已獲得廣泛應(yīng)用。它的基本原理是樁頂受到樁錘沖擊后,根據(jù)樁頂實(shí)測力和加速度數(shù)據(jù)分析樁的完整性,?;诖朔N方法的測樁儀設(shè)備輕便、靈活,,運(yùn)輸和現(xiàn)場安裝的工作量小,,測量效率高,耗時(shí)短,,不易發(fā)生安全事故,。
本設(shè)計(jì)利用嵌入式系統(tǒng)技術(shù)開發(fā)出具有實(shí)時(shí)采集數(shù)據(jù),、分析數(shù)據(jù),、本地給出處理報(bào)告功能的測樁儀。儀器具有自動調(diào)節(jié)信號增益,、數(shù)據(jù)采樣速度高,、數(shù)據(jù)自動存儲及整機(jī)自動化程度高等特點(diǎn)。
2 系統(tǒng)問題分析
2.1 現(xiàn)有測樁儀
測樁儀完成數(shù)據(jù)采集" title="數(shù)據(jù)采集">數(shù)據(jù)采集與處理的工作現(xiàn)場環(huán)境一般較為惡劣,,彌漫著各種干擾(來自系統(tǒng)內(nèi)部和外部),,當(dāng)被測信號很微弱時(shí),有效數(shù)據(jù)就會被噪聲“淹沒”,,導(dǎo)致數(shù)據(jù)采集與處理誤差很大,,可靠性降低。
有些測樁儀配備的采集系統(tǒng)的頻響范圍過窄,樁多處斷裂時(shí)動測曲線無法反映,,超淺部的樁身缺陷會導(dǎo)致測試盲區(qū),。
現(xiàn)有的一些儀器大多采用基于軟件的程控放大方式,降低了數(shù)據(jù)采集系統(tǒng)的采樣速率,,對于快速的小信號無法準(zhǔn)確反映,。
2.2 解決方法
針對干擾信號,本系統(tǒng)在數(shù)據(jù)采樣前的硬件上首先將信號接入模擬低通濾波器,,濾除高頻噪聲,;在數(shù)據(jù)處理" title="數(shù)據(jù)處理">數(shù)據(jù)處理前期使用軟件數(shù)字濾波" title="數(shù)字濾波">數(shù)字濾波器對引入的特定頻率噪聲進(jìn)行帶阻濾波。具體設(shè)計(jì)時(shí),,在A/D采樣前增加模擬有源濾波器進(jìn)行預(yù)濾波以限制信號帶寬,,去掉高于1/2抽樣頻率以上的高頻分量,防止頻譜混疊,。
傳感器,、采樣/保持器、模/數(shù)轉(zhuǎn)換器的參數(shù)指標(biāo)對系統(tǒng)的頻響范圍有較大影響,,選型時(shí)應(yīng)從整體上權(quán)衡各部件的性能,,尋求成本和速率的最佳值。
為了既提升測量精度又減小對測量速度的影響,,系統(tǒng)采用全硬件的高速動態(tài)放大方式,。
3 系統(tǒng)結(jié)構(gòu)與關(guān)鍵技術(shù)
首先進(jìn)行功能分析,規(guī)劃出系統(tǒng)的體系結(jié)構(gòu),,列出各構(gòu)件模塊,,然后進(jìn)行底層的具體設(shè)計(jì),最后完成系統(tǒng)的整合,。測樁儀的結(jié)構(gòu)示意圖如圖1所示,。

測樁儀設(shè)備包含的功能模塊有數(shù)據(jù)采集、數(shù)據(jù)處理(含數(shù)字濾波,、分析處理,、圖形顯示及報(bào)表打印)、數(shù)據(jù)存儲,,外部還需配備擊錘及傳感器,。測樁儀的信號輸入接口有3個(gè),分別為速度傳感器" title="速度傳感器">速度傳感器,、有源和無源加速度傳感器" title="加速度傳感器">加速度傳感器,,它們通過模擬多路選擇器選定一路有效信號進(jìn)入模擬低通濾波器。濾波后的信號通過采樣保持器后分為二路,,一路進(jìn)入低精度的模/數(shù)轉(zhuǎn)換比較器,,實(shí)時(shí)監(jiān)測信號的幅值范圍并報(bào)告給控制單元" title="控制單元">控制單元,,由其產(chǎn)生出相應(yīng)的放大系數(shù),對可編程放大器進(jìn)行設(shè)置,。另一路首先通過可編程放大器進(jìn)行放大,,然后進(jìn)入高精度模/數(shù)轉(zhuǎn)換比較器,最后由控制單元設(shè)定放大系數(shù)并與放大信號同步存儲,。數(shù)據(jù)采集部分的結(jié)構(gòu)框圖如圖2所示,。

一個(gè)采樣周期后,控制單元向處理器ARM申請中斷,,處理器讀取數(shù)據(jù)信息后完成數(shù)據(jù)的預(yù)處理分析和圖形顯示,,通過USB接口向上位機(jī)傳輸數(shù)據(jù),以獲得完整的數(shù)據(jù)分析和報(bào)表打印服務(wù),。數(shù)據(jù)處理和數(shù)據(jù)存儲部分的結(jié)構(gòu)框圖如圖3所示,。

采樣過程中,數(shù)據(jù)的放大倍數(shù)與測量結(jié)果的同步時(shí)序控制是硬件需要解決的關(guān)鍵問題,。數(shù)字濾波,、數(shù)據(jù)分析計(jì)算和指數(shù)放大顯示是軟件需要解決的關(guān)鍵問題。
3.1 硬件相關(guān)
整個(gè)系統(tǒng)的結(jié)構(gòu)包括數(shù)據(jù)采集,、數(shù)據(jù)處理和數(shù)據(jù)存儲,,下面僅對部分關(guān)鍵技術(shù)進(jìn)行討論,隨后描述控制單元的實(shí)現(xiàn),。
3.1.1 動態(tài)放大技術(shù)
由于反射波幅值變化范圍大,,為了使小信號也有較高分辨率,采用硬件自動實(shí)時(shí)選擇信號的放大倍數(shù),,增加系統(tǒng)的動態(tài)范圍,。在最大量程下,進(jìn)行一次低精度A/D轉(zhuǎn)換,,控制單元CPLD(復(fù)雜可編程邏輯器件)讀取轉(zhuǎn)換值,,編碼存儲進(jìn)16位SRAM(2個(gè)IS62C256級聯(lián)),并給放大器送出當(dāng)前信號的增益系數(shù),。由于設(shè)計(jì)中采用二個(gè)可編程放大器AD526串接,,增益為1、2,、4,、8、16,、32、64,、128,、256九種,,所以對于雙極性信號,低精度ADC必須采用10位以上的模/數(shù)轉(zhuǎn)換器才能滿足所有增益的放大,。選用MAXl426型10位模/數(shù)轉(zhuǎn)換器作為低精度ADC,,AD1674型12位模/數(shù)轉(zhuǎn)換器作為高精度ADC,以降低開發(fā)成本,。動態(tài)放大的結(jié)構(gòu)框圖如圖4所示,。
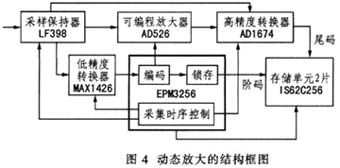
利用CPLD的硬件可編程特性,將數(shù)據(jù)的采樣放大與模/數(shù)轉(zhuǎn)換時(shí)序設(shè)定為流水線方式,,高精度ADC轉(zhuǎn)換數(shù)據(jù)時(shí),,浮點(diǎn)放大電路同步放大下一級信號。
后級12位ADC進(jìn)行模/數(shù)轉(zhuǎn)換時(shí),,前級的10位ADC又開始了下一輪數(shù)據(jù)的轉(zhuǎn)換,。在本設(shè)計(jì)中,12位高精度ADC轉(zhuǎn)換的時(shí)間長于前級放大環(huán)節(jié)的時(shí)間,,流水線的耗時(shí)主要在后一級上,。
3.1.2 超前觸發(fā)技術(shù)
為了保證采樣波形的完整性,系統(tǒng)設(shè)計(jì)中利用CPLD與SRAM實(shí)現(xiàn)超前觸發(fā),,即在觸發(fā)前預(yù)存定長的信號轉(zhuǎn)換數(shù)據(jù),。將觸發(fā)電平編碼以數(shù)字形式鎖存在CPLD內(nèi)部,與經(jīng)過低精度ADC轉(zhuǎn)換的數(shù)字信號進(jìn)行比較,。當(dāng)滿足觸發(fā)條件后CPLD能記錄下SRAM內(nèi)當(dāng)前數(shù)據(jù)的地址,,同時(shí)啟動定時(shí)計(jì)數(shù)器,計(jì)數(shù)器滿后停止向SRAM內(nèi)填充數(shù)據(jù),,一次采樣操作完成,。
3.1.3 NandFlash的啟動過程
處理器選用帶有豐富控制器ARM9內(nèi)核的S3C2410。結(jié)合處理器上運(yùn)行嵌入式操作系統(tǒng)的特點(diǎn),,選用64MB的Nand Flash K9F1208UOM存儲程序代碼和受掉電保護(hù)的數(shù)據(jù),,2個(gè)16位的HY57V561632級聯(lián)組成64 MB的SDRAM存儲運(yùn)行程序代碼和數(shù)據(jù)。系統(tǒng)的多階段啟動過程(Bootloader)如下所述:在第一階段,,處理器首先進(jìn)行硬件設(shè)備初始化并加載第二階段的運(yùn)行代碼至SDRAM,,設(shè)置好堆棧后轉(zhuǎn)入第二階段的入口;第二階段首先初始化所要使用的硬件設(shè)備,,然后檢測系統(tǒng)內(nèi)存映射關(guān)系,,把操作系統(tǒng)的內(nèi)核映像和根文件系統(tǒng)從NandFlash加載數(shù)據(jù)到SDRAM的內(nèi)存空間中,再為內(nèi)核設(shè)置啟動參數(shù),,最后調(diào)用系統(tǒng)內(nèi)核,,完成操作系統(tǒng)的啟動過程。
3.2 相關(guān)軟件
3.2.1 嵌入式操作系統(tǒng)的移植
該系統(tǒng)平臺基于嵌入式Iinux操作系統(tǒng)設(shè)計(jì),,充分利用其強(qiáng)實(shí)時(shí)性和可移植性的特點(diǎn),。移植操作系統(tǒng)以適應(yīng)于本硬件平臺需要編寫二部分代碼:一是前文所述的啟動代碼Bootloader,;二是內(nèi)核代碼與硬件密切相關(guān)的部分。內(nèi)核代碼與硬件密切關(guān)聯(lián)的代碼大部分位于arch子目錄中,,而附加設(shè)備的驅(qū)動程序通常位于drivers子目錄內(nèi),。
3.2.2 數(shù)字濾波方式
系統(tǒng)對速度傳感器與加速度傳感器的二種輸入信號采用不同的濾波過程以適應(yīng)其各自的特點(diǎn)。對于速度傳感器的安裝諧振場振蕩器而言,,恰當(dāng)?shù)臄?shù)字濾波可以與之互補(bǔ),,從而拓展傳感器的使用頻率范圍。因此這種信號的數(shù)字濾波方式是在頻域分析的基礎(chǔ)上,,以恰好濾去安裝諧振場振蕩器為原則,。可通過比較濾波前后幅值譜曲線的方式來驗(yàn)證濾波是否恰當(dāng),,選擇安裝諧振峰左側(cè)第一谷處頻率作為低通截止頻率,;用于加速度傳感器的數(shù)字濾波,其使用原則與速度傳感器一樣,,但它的濾波過程是在積分之后進(jìn)行,。
3.2.3 顯示處理與分析和測試程序
系統(tǒng)首先提供測試結(jié)果的原始曲線,用來反映現(xiàn)場測試時(shí)的原始記錄狀態(tài),。但是原始曲線未經(jīng)任何處理,,常常不能清晰地反映樁身完整性特征。因此,,為了準(zhǔn)確地分析測量結(jié)果,,單一的原始曲線是不夠的,還需要經(jīng)過具有物理意義的處理手段進(jìn)行處理,。這些處理手段包括旋轉(zhuǎn),、指數(shù)放大和平滑等。
另一點(diǎn)值得一提的是,,為了提高時(shí)域分析結(jié)果的準(zhǔn)確性與可靠性,,以及分析所用處理手段的合理程度,提交曲線可以引入頻域曲線與頻域分析結(jié)果,。對速度傳感器而言,,它為原始的幅值譜,對加速度傳感器而言,,它應(yīng)是積分譜,。
4 結(jié)束語
本文提出的設(shè)計(jì)方案具有低成本和寬頻響的特點(diǎn)。由于實(shí)驗(yàn)條件限制,,數(shù)據(jù)采集的速度瓶頸是2個(gè)模/數(shù)轉(zhuǎn)換器的轉(zhuǎn)換速率,,如果選用高速率的模/數(shù)轉(zhuǎn)換器,并將高精度模/數(shù)轉(zhuǎn)換器選為16位,系統(tǒng)的性能將得到大幅度提高,。