
1.引 言
傳感器是能感受規(guī)定的被測(cè)量并按照一定的規(guī)律轉(zhuǎn)換成可用輸出信號(hào)的器件或裝置,作為信息系統(tǒng)的關(guān)鍵基礎(chǔ)器件,近年來(lái),已經(jīng)受到國(guó)內(nèi)外的廣泛關(guān)注。傾斜傳感器作為經(jīng)典的傳感器之一,也正在被新材料、新原理、多功能、新結(jié)構(gòu)所取代,與數(shù)字技術(shù)、通信技術(shù)的結(jié)合越來(lái)越密切,朝著集成化、智能化和微型化方向發(fā)展。
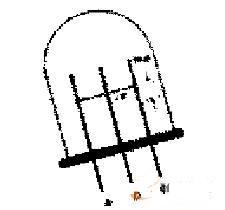
圖一
2.傾斜傳感器原理
為了測(cè)知被測(cè)物體與標(biāo)準(zhǔn)水平面的傾斜角度,常常用到一種電解質(zhì)型傳感器.圖為一雙軸傳感器在輕微傾斜時(shí)單軸向示意圖,傳感器由密封圓筒構(gòu)成,圓筒之間充滿整個(gè)容量一半左右的流體介質(zhì),電解質(zhì)為呈粘滯性液體,圓筒中裝有電極,并且浸泡在電解液中,各電極分別有管腳引出。當(dāng)傳感器傾斜時(shí),液面因?yàn)橹亓Ρ3炙剑瑑呻姌O間傳導(dǎo)率與電極浸入液體的長(zhǎng)度成正比。例如圖中所示的傾角下,電極a、b之間的傳導(dǎo)率大于電極b、c之間的傳導(dǎo)率。可見,在電特性上,傳感器類似于分壓計(jì),阻抗的變化和傾斜的角度成正比,傳感器輸出信號(hào)隨傾斜角度變化的關(guān)系如圖二所示,注意當(dāng)傾角大于20°時(shí)輸出信號(hào)變得非線性。可以證明,傳感器可以測(cè)量的傾角范圍為電解液容量、電極間距和電極長(zhǎng)度的函數(shù)。傳感器在某種程度上類似于鉛酸電池,電流能引起電解質(zhì)的化學(xué)反應(yīng),最終結(jié)果使電解質(zhì)失去導(dǎo)電性,所以為了防止電解反應(yīng)的發(fā)生,傳感器的激勵(lì)必須為頻率足夠高的交變電流。對(duì)于某些電解液,這個(gè)頻率可以為25Hz,而有些電解液則需要達(dá)到 1000Hz到4000Hz。
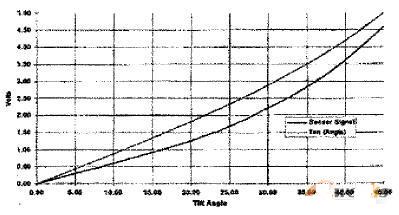
圖二 傳感器輸出特性
3. 傾斜傳感器在艦載天線控制中的應(yīng)用
3.1艦艇的前進(jìn)、海浪顛簸都會(huì)導(dǎo)致艦載天線隨機(jī)座發(fā)生傾斜,所以為了保證天線能夠連續(xù)準(zhǔn)確地跟蹤衛(wèi)星,就要對(duì)天線軸架進(jìn)行實(shí)時(shí)調(diào)整。由于天線的轉(zhuǎn)動(dòng)控制除了方位(Azimuth)與俯仰(Level),還有一個(gè)俯仰的垂直面(Cross level),因此要用到三個(gè)檢測(cè)電機(jī)轉(zhuǎn)速的角速度傳感器和一個(gè)檢測(cè)水平度的傾斜傳感器。如圖所示:
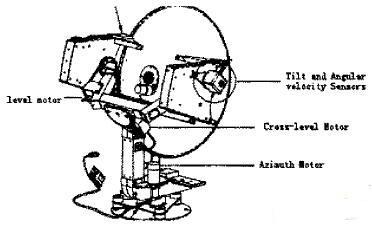
圖三 艦載衛(wèi)星天線示意圖
3.2傳感器參數(shù)及應(yīng)用
測(cè)量范圍±45°;輸入電壓+5v;輸出+1~4vDC或4~20mA;分辨率為0.01°;非線性為±2°;工作溫度為-40°C~+80°C;承受沖擊能力為1000g,1msec。
對(duì)于雙軸傳感器則即有與單軸傳感器類似的屬性,又包含自身的復(fù)雜性。由于雙軸共享中心電極,四個(gè)外圍電極理想地分布于正方形的四個(gè)角,所以每個(gè)軸向的獨(dú)立測(cè)量要用到兩種方法:一是同一時(shí)刻只有一個(gè)軸向激勵(lì),二是雙軸向同時(shí)加載不同頻率的激勵(lì),如圖所示,電極a、c間的激勵(lì)信號(hào)頻率為電極d、e間的二倍,要注意方法一中正交的兩個(gè)軸向分別為對(duì)角線ac和de方向,而方法二中正交的兩個(gè)軸向則是外圍電極正方形的邊緣ae和ad方向。
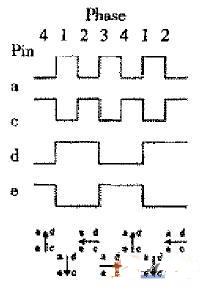
圖四 外圍電極波形
3.3傳感器接口電路

圖五 輸入電路框圖
從圖中可以看出,由于傳感器輸出為微弱的模擬信號(hào),所以必須把傳感器輸出的模擬量進(jìn)行預(yù)處理,又稱信號(hào)調(diào)理,并且經(jīng)過(guò)A/D轉(zhuǎn)換變成數(shù)字量,處理器才能對(duì)其進(jìn)行分析處理。具體到電解質(zhì)型傾角傳感器,以某型艦載天線為例,實(shí)際應(yīng)用電路如下圖所示:
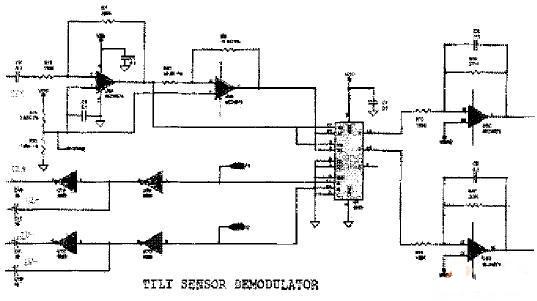
圖六 傳感器應(yīng)用電路
圖中U5構(gòu)成傳感器輸出CTR端信號(hào)的反相放大電路,F(xiàn)1,F(xiàn)2來(lái)自處理器輸出端口控制信號(hào),為頻率50HZ、相位差180°的方波,經(jīng)過(guò)反相器作為傳感器的LV和CL電極驅(qū)動(dòng),既可實(shí)現(xiàn)每對(duì)電極上信號(hào)極性的交替變化,又能提供水平和垂直水平二維傾斜度測(cè)量的選擇。F1,F(xiàn)2同時(shí)又作用于多路輸入選擇器 U6的控制端A和B,對(duì)應(yīng)于每對(duì)電極上信號(hào)極性的變化,選擇控制相應(yīng)極性的信號(hào)作為輸出。
4.結(jié)束語(yǔ)
電解質(zhì)型傾角傳感器具有良好的復(fù)現(xiàn)性、可靠性和較高的精度,在應(yīng)用中需要特別注意的是:⑴驅(qū)動(dòng)信號(hào)F1,F(xiàn)2必須為直流分量為零的交流電壓信號(hào),因?yàn)橹绷鲿?huì)使電解質(zhì)產(chǎn)生電解反應(yīng)而失去導(dǎo)電性,對(duì)傳感器造成不可逆轉(zhuǎn)的損壞。⑵避免使用波峰焊接以及化學(xué)有機(jī)溶劑洗刷,以防止傳感器輸出特性的改變和電解液泄露。
本文作者創(chuàng)新點(diǎn):為確保其可靠運(yùn)行,應(yīng)在處理器端口引腳和傳感器之間接上CMOS 反相器。微處理器可以設(shè)置成每秒喚醒一次或幾次進(jìn)行新的測(cè)量,同時(shí)采樣驅(qū)動(dòng)信號(hào)中點(diǎn)電壓作為參考,這樣每次測(cè)量分兩步完成:首先計(jì)算傳感器信號(hào)減去參考信號(hào)的值,然后加上反相驅(qū)動(dòng)信號(hào)并計(jì)算參考信號(hào)減去傳感器信號(hào)的值,將兩次測(cè)量結(jié)果相減得到所需傾斜值的2 倍且使系統(tǒng)產(chǎn)生的偏差相抵消。