
CMOS" title="CMOS">CMOS傳感器" title="圖像傳感器">圖像傳感器產(chǎn)生于20世紀(jì)80年代,由于當(dāng)時CMOS工藝的制造技術(shù)不高,以至于傳感器在應(yīng)用中的雜訊較大,商品化的進(jìn)程一直很慢。至今,隨著工藝的不斷提高,CMOS圖像傳感器的應(yīng)用范圍也不斷擴(kuò)大,涉及到數(shù)碼產(chǎn)品、通訊、工業(yè),醫(yī)療等各領(lǐng)域。與CCD相比,CMOS圖像傳感器具有體積小,功耗低,成本低等特點(diǎn)。Cypress公司的CMOS圖像傳感器IBIS5" title="IBIS5">IBIS5-B-1300是一款高性能、大動態(tài)范圍的圖像傳感器。圖像傳感器的正常工作需要有正確的驅(qū)動時序信號,本文就圖像傳感器IBIS5-B-1300,給出采用VHDL語言設(shè)計的驅(qū)動時序和仿真結(jié)果。
1 IBIS5-B-1300圖像傳感器
1.1 芯片簡介
Cypress公司的IBIS5-B-1300將模擬圖像獲取、數(shù)字化和數(shù)字信號處理的功能集成在單一芯片中,是一款高性能的CMOS圖像傳感器。這款130萬像素(1 280×1 024)的圖像傳感器可以采用SXGA或VGA格式輸出,幀頻可達(dá)27.5 f/s(1 280×1 024)或106 f/s(640×480)。
其主要特點(diǎn)如下:
(1)6.7μm的高填充因子像素單元。它可使器件的靈敏度較高,噪聲較小。
(2)高的動態(tài)范圍(單斜率積分下為64 dB)。當(dāng)采用雙斜率積分或多斜率積分時,動態(tài)范圍可進(jìn)一步提高。
(3)片載可調(diào)整增益和偏置的輸出放大器。它能使信號的抖動限制在片載10 b ADC的輸入范圍之內(nèi)。
(4)片載40 MHz的10 b ADC。它可直接對輸出模擬信號進(jìn)行模/數(shù)轉(zhuǎn)換,該ADC在電氣上與圖像傳感器分離,如果需要,可選擇不經(jīng)模/數(shù)轉(zhuǎn)換而直接輸出模擬信號。
(5)隨機(jī)開窗模式和亞采樣模式。隨機(jī)開窗模式可以只對感興趣的區(qū)域進(jìn)行讀出;亞采樣模式可以很好地滿足圖像壓縮的需要。
(6)片載時序與控制邏輯序列發(fā)生器、內(nèi)部寄存器。它可使得設(shè)計者用較少的信號來控制傳感器的工作。
1.2 工作原理
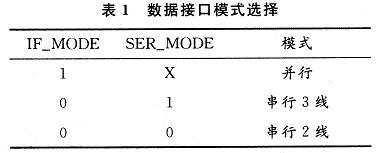
IBIS5-B-1300內(nèi)部有12個寄存器,提供傳感器工作所需的參數(shù)及工作方式。對寄存器寫入的數(shù)據(jù)決定了傳感器的工作狀態(tài)。寄存器的數(shù)據(jù)寫入接口有3種:并行接口、串行三線接口、串行兩線接口。可通過芯片的IF_MODE和SER_MODE管腳接不同的值來選擇不同的數(shù)據(jù)接口模式(如表1所示)。
并行接口使用16 b并行輸入來載入新的寄存器值。串行3線接口(或串轉(zhuǎn)并接口)使用串行接口將數(shù)據(jù)移入寄存器緩沖器,當(dāng)完整的數(shù)據(jù)字移入寄存器緩沖器時,數(shù)據(jù)字才被載入當(dāng)前正在編碼的寄存器。串行2線是一個單向的接口,本文暫不做分析。
IBIS5-B-1300具有兩種快門方式:卷簾快門和同步快門,用寄存器(0000)的bitO進(jìn)行設(shè)定,“1”為卷簾快門,“0”為同步快門。時序如圖1,圖2所示。

在卷簾快門模式下,幀頻Frame period=(Nr.Lines×(RBT+Pixel Period*Nr.Pixels))。
在同步快門模式下,幀頻Frame period="Tint"+Tread out="Tint"+(Nr.Lines×(RBT+Pixel Period×Nr.Pixels))。其中,Tint為積分(曝光)時間;Nr.Lines為每幀讀出的行數(shù);Nr.Pixels為每行讀出的像素數(shù);RBT為行空白時間(典型值為3.5 ms);Pixel Period為1/40 MHz="25" ns。
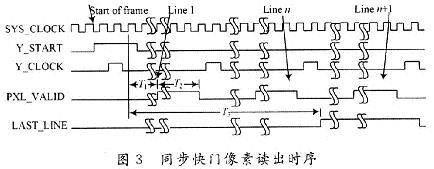
卷簾快門中有兩個y方向的移位寄存器,一個指向正在被讀出的行,另一個指向正在被復(fù)位的行,兩個指針由同一時鐘y_clock(行時鐘)驅(qū)動,它們之間的差值代表了光積分時間。在卷簾快門模式下,像素的讀出和復(fù)位同時進(jìn)行,每行像素的復(fù)位和讀出是順序進(jìn)行的(見圖3)。像素的積分時間可以通過寄存器INT_TIME來修改。在這種模式下,像素在不同的時刻感光,因而在采集動態(tài)圖像時會產(chǎn)生模糊。
在同步快門模式下,所有像素的光積分在同一時刻進(jìn)行的。所有像素同時被復(fù)位,在經(jīng)過光積分后,像素的值被存儲在每個像素的存儲節(jié)點(diǎn)上,然后逐行依次讀出。像素的光積分和讀出是串行的,在像素讀出時,積分被禁止,因而可以避免卷簾快門所產(chǎn)生的動態(tài)圖像模糊的問題。此外,同步快門支持多斜率積分,可獲得比卷簾快門更高的動態(tài)范圍。
綜上分析,在使用這款成像器芯片時,對快門方式要根據(jù)應(yīng)用的場合進(jìn)行選擇,在對快速運(yùn)動的物體進(jìn)行捕獲或要求有高的動態(tài)范圍時應(yīng)選擇同步快門;而在對圖像的幀速率要求較高或要對圖像進(jìn)行連續(xù)采集時應(yīng)選擇卷簾快門。
2 基于FPGA" title="FPGA">FPGA的CMOS控制時序的設(shè)計
2.1 現(xiàn)場可編程門陣列FPGA
隨著集成電路的發(fā)展,大規(guī)模可編程邏輯器件廣泛用于電路設(shè)計領(lǐng)域,它具有功耗低,可靠性高的特點(diǎn),同時大大減小了電路板的尺寸。FPGA的內(nèi)部結(jié)構(gòu)決定了FPGA在時序設(shè)計方面的優(yōu)越性。該設(shè)計選用Xilinx公司的Spartan3系列FPGA芯片XC3$50作為硬件設(shè)計平臺。Spar-tan3基于VirtexⅡFPGA架構(gòu),采用90 nm技術(shù),8層金屬工藝,內(nèi)嵌硬核乘法器和數(shù)字時鐘管理模塊。從結(jié)構(gòu)上看,它將邏輯、存儲器、數(shù)字運(yùn)算、數(shù)字處理器、I/O以及系統(tǒng)管理資源完美地結(jié)合在一起,使之具有更高層次、更廣泛的應(yīng)用。
2.2 控制時序的設(shè)計
該設(shè)計采用VHDL硬件描述語言,根據(jù)自頂向下的設(shè)計方法,將時序控制部分分為三個模塊:復(fù)位模塊、寄存器配置模塊和快門模塊。由于寄存器有兩種配置方式,快門模式也有兩種,因而后兩部分都可以再細(xì)分為兩個小模塊。三個大的模塊有嚴(yán)格的先后關(guān)系,必須在前一模塊已完成后,才可開始后一模塊。圖4顯示模塊的劃分及其關(guān)系。

復(fù)位模塊是用來產(chǎn)生圖像傳感器所需的SYS_RE_SET信號,使傳感器正常復(fù)位,內(nèi)部寄存器清零,為寄存器的配置做好準(zhǔn)備。
寄存器配置模塊是用來配置圖像傳感器內(nèi)部的12個寄存器,提供傳感器工作所需的參數(shù)和方式。其中,參數(shù)有積分時間、積分方式(單斜率或多斜率)、X序列發(fā)生器的時鐘間隔、SS序列發(fā)生器的時鐘間隔、亞采樣方式、開窗位置及大小等。
快門模塊用于產(chǎn)生傳感器工作所需的一些控制信號,針對快門方式的不同給出所需的時序控制信號。在同步快門的設(shè)計中,該設(shè)計采用單斜率積分,在此設(shè)計基礎(chǔ)上多斜率積分容易實(shí)現(xiàn)。
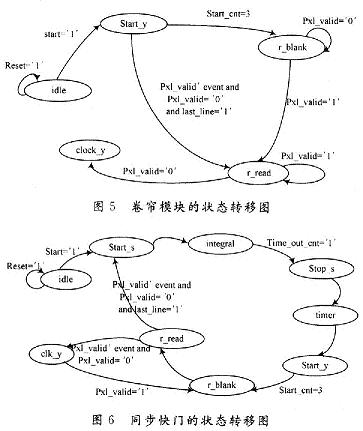
該設(shè)計采用VHDL對各模塊時序進(jìn)行編程。其中,快門模塊使用狀態(tài)機(jī)來實(shí)現(xiàn)各狀態(tài)之間的轉(zhuǎn)換(圖5顯示了卷簾模塊的狀態(tài)轉(zhuǎn)移圖,圖6顯示了同步快門的狀態(tài)轉(zhuǎn)移圖)。全局時鐘和ADC時鐘采用DCM即數(shù)字時鐘管理單元來實(shí)現(xiàn)。
3 實(shí)驗(yàn)結(jié)果
3.1 仿真結(jié)果
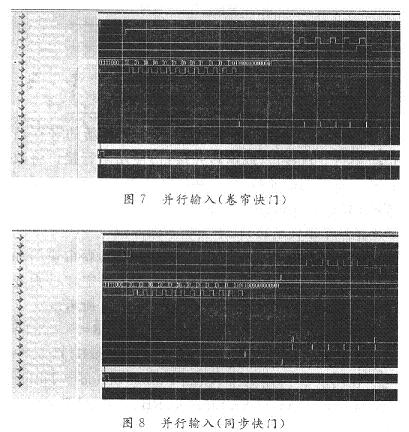
時序控制電路設(shè)計完畢后,需要對各部分進(jìn)行功能仿真、邏輯綜合以及綜合后仿真,最后對整個系統(tǒng)進(jìn)行綜合、布局布線,完成時序仿真。對各模塊編程并仿真通過后,將各模塊加載到主函數(shù)top中,采用并行的寄存器配置方式,對卷簾和同步兩種快門方式進(jìn)行仿真,在Modelsim中的仿真結(jié)果如圖7,圖8所示。
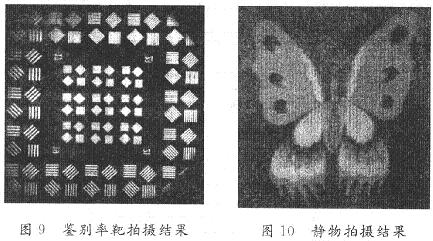
3.2 成像結(jié)果
將此驅(qū)動時序應(yīng)用于相機(jī)系統(tǒng),在全幀輸出模式(1 280×1 024)下,對鑒別率靶和靜物進(jìn)行拍攝,實(shí)驗(yàn)結(jié)果如圖9,圖10所示。由所拍攝結(jié)果可以看出,圖像清晰穩(wěn)定,無明顯變形,CMOS圖像傳感器滿足了成像的需求。
4 結(jié)語
圖像傳感器驅(qū)動時序的正確與否對其能否正常工作起著決定性的作用。本文在分析CMOS圖像傳感器IBIS5-B-1300工作時序的基礎(chǔ)上,設(shè)計了兩種寄存器配置方案和兩種快門方式,并用FPGA內(nèi)嵌的數(shù)字時鐘管理單元(DCM)完成了系統(tǒng)時鐘和ACD時鐘的設(shè)計。實(shí)驗(yàn)結(jié)果表明,所設(shè)計的驅(qū)動時序可以滿足該圖像傳感器的驅(qū)動要求。