
摘 要: 論述了差分" title="差分">差分GPS算法模型。通過算法比較,確定了將雙差算法模型作為高精度數(shù)據(jù)處理" title="數(shù)據(jù)處理">數(shù)據(jù)處理軟件的解算模型。在此基礎上,給出了通過已知坐標解算出未知坐標的全過程, 設計了以A12 OEM板為核心的GPS接收系統(tǒng)。實驗測量結果表明,此GPS接收系統(tǒng)可以實現(xiàn)高精度的定位。
關鍵詞: 差分GPS 基線解算 A12 OEM板 外圍電路
GPS利用最簡單的C/A碼定位,精度可達到14米。美國為了防止別的國家把GPS用于軍事目的,采用SA政策,人為地將誤差引入衛(wèi)星時鐘和衛(wèi)星數(shù)據(jù)中,故意降低GPS的定位精度" title="定位精度">定位精度。近幾年來,國內外學者在研究GPS定位精度方面取得了重大進展。利用載波相位差分技術可以進行高精度定位,將動態(tài)精度提高到厘米級,而靜態(tài)精度甚至可以提高到毫米級。載波相位差分技術應用雙差算法來實現(xiàn)坐標的解算,可以有效地消除星鐘誤差和星歷誤差,更重要的是它可以消除接收機的收鐘誤差。因此顯著地提高了定位精度。
GPS通過數(shù)據(jù)處理來提高精度的同時,接收機的硬件對精度也有著直接的影響。而GPS-OEM板是封裝極其簡單、便于二次開發(fā)的GPS傳感器,能完成GPS主要數(shù)據(jù)采集以及簡單的定位解算功能;通過對外圍電路的設計,再聯(lián)系自開發(fā)的數(shù)據(jù)后,處理軟件可得到高精度的定位。
本文以載波相位差分為例,討論靜態(tài)高精度差分算法模型及數(shù)據(jù)處理方法,設計了以A12 OEM板為核心的低成本高精度GPS接收系統(tǒng)。此系統(tǒng)包括電源、系統(tǒng)設置電路、通信和時間標志信息輸出等外圍電路。試驗結果證明,該GPS接收系統(tǒng)測量精度" title="測量精度">測量精度達到毫米級。
1 高精度GPS算法
1.1載波相位差分算法模型[1]
利用載波相位進行測量,就其本身而言,測量精度可達0.5~2.0mm。然而GPS測量會受到多種誤差的影響,如衛(wèi)星軌道誤差、衛(wèi)星鐘差以及電離層和對流層的折射誤差的影響。為了提高定位精度,有必要研究各種誤差規(guī)律,建立改正模型對其進行改正。但由于這種改正往往難以完全正確地反映規(guī)律,所以,觀測值中仍然存在殘余影響。雖然可通過在觀測方程中加入相應的附加參數(shù)來消除其影響,然而大量的多余未知參數(shù)不但增加了平差計算的工作量,而且還影響定位未知參數(shù)的可靠性。一種簡單有效消除或減弱誤差影響的方法是將這些觀測量進行不同的線性組合。
1.1.1靜態(tài)相對定位
在GPS相位定位中,常用的三種差分(線性組合)是單差、雙差和三差。由于GPS接收機使用穩(wěn)定性較差的石英鐘,它難以用模型來表示。如果將每個觀測歷元的接收機鐘差都作為未知數(shù)求解,則將使解算基線向量的法方程中的未知數(shù)個數(shù)大大增加。而使用雙差模型后,接收機鐘差的影響被消除了,它既不涉及鐘差模型,又使法方程中未知數(shù)個數(shù)大大減少,這也是雙差模型的最大優(yōu)勢。所以本文在研究算法時,采用的是雙差模型來解算。
1.1.2 雙差分觀測方程
若在求單差分的基礎上再對不同衛(wèi)星S j和Sk求差,便可得到雙差觀測方程:

1.2 數(shù)據(jù)處理
1.2.1 基線向量解算的數(shù)學模型[2~3]
由GPS衛(wèi)星定位原理可知,設在GPS標準時刻ti,在測站1、2同時對衛(wèi)星S j和Sk進行載波相位測量,用向量解算方法由雙差觀測值模型解算基線向量,由基線向量與站星之間的關系可得站星雙差相位觀測方程為:
式中,衛(wèi)星S j和Sk在選擇j=1的衛(wèi)星為參考衛(wèi)星時,k=2,3,4……。對于j=1,k=2;j=1,k=3,……,其站星雙差觀測值誤差方程可仿照公式(6)、(7)寫出,對不同觀測歷元(即ti時刻)可分別列出類似的各歷元時刻的一組誤差方程。
1.2.2 基線解算
t1歷元在1、2測站上同時觀測了s個衛(wèi)星,在連續(xù)觀測的情況下,共有n=M(s-1)個誤差方程,其中M為觀測歷元個數(shù)。
將所有誤差方程寫成矩陣形式:V=AX+L(7)
其中j為歷元個數(shù),j=n/(k-1)。
按各類雙差觀測值等權且彼此獨立,即權陣P為單位陣,組成法方程:
NX+B=0 (8)
式中,N=ATA;B=ATL。可解得X為:
X=-N-1B=ATA-1(ATL)(9)
若1點坐標已知,可求得2點坐標:
2 接收機的設計
2.1 A12 OEM板
A12 OEM板是法國Thales Navigation公司生產(chǎn)的模塊式GPS單頻單板定位設備,其原理框圖[4~5]如圖1所示。A12 OEM板采用的是單3.3V電源供電,其內嵌有定位XA處理器,具有快速軟件執(zhí)行速率,并可通過RS232串行接口對存儲在閃存中的定位解算軟件進行更新或升級;具有12通道代碼差分,集GPS接收、定位于一體;帶有完整載波相位數(shù)據(jù)輸出,能夠跟蹤L1頻率的C/A碼及載波相位;12個獨立的并行相關通道用于跟蹤全部GPS可見衛(wèi)星,各個通道可同時跟蹤1顆GPS衛(wèi)星的信號。
由于采用代碼及載波跟蹤GPS的L1頻段,A12 OEM板具有較高的定位精度,工作時能為用戶提供三維位置、速度、時間和其他狀態(tài)信息。根據(jù)GPS衛(wèi)星星座的空間布置,接收機有12條并行通道,在同一時刻最多可觀測到12顆衛(wèi)星。同時,它作為GPS接收機核心部分,既可以配置成參考站,又可以配置成移動單元,廣泛用于定位和導航領域。
2.2 外圍電路設計[5]
A12 OEM板及PC機的正常運行需要運行如圖2所示的相應外圍電路。定位信號由天線接收,經(jīng)過低噪聲前置放大后,進入射頻前端。射頻前端具有變頻作用,將射頻信號轉換為中頻信號。中頻信號經(jīng)采樣信號采樣、量化后,轉換為數(shù)字中頻信號。數(shù)字中頻信號進入相關通道經(jīng)過處理后,解譯出導航電文。微處理器接收導航電文數(shù)據(jù),進行相應處理后給出所需的定位信號或提供特定的應用服務。
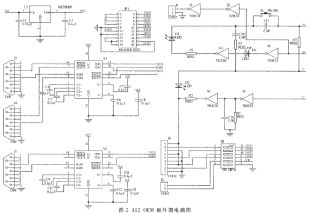
本設計中,射頻前端和相關通道部分選用Philips半導體公司生產(chǎn)的SAA1575 和 UAA1570芯片。其中,UAA1570能夠與外圍電路組合完成射頻前端的功能。A12 OEM板有兩種接口:JP1連接器是通常使用的20引腳輸入/輸出及供電接口,用于外圍應用電路的連接,J1連接器是BNC型的RF天線接口,用于連接GPS射頻天線。
A12 OEM板與外圍應用電路組合構成GPS接收機,實現(xiàn)與PC機的通信。通過OEM板接收、采集衛(wèi)星信息,運行存儲于EEPROM中,并根據(jù)定位原理編寫的解算軟件計算出相應的結果,從而實現(xiàn)PC機利用專用軟件完成對GPS接收機的設置及控制。該電路為此類GPS接收機提供了三個串行口:主串行口J4、差分串行口J5和可選擇串行口J3。其中,主串行口用于與導航計算機通信,差分串行口用于差分修正信息的輸入或輸出。對于電源、差分信息、時間標志信息的輸出則設有相應的發(fā)光二極管指示其工作狀態(tài)。整個電路結構簡單、緊湊,各種功能易于實現(xiàn)。
2.2.1 電源電路
電源電路主要為整個接收機系統(tǒng)提供電源,同時產(chǎn)生接收機運行時所需的高電平,為此采用了三端穩(wěn)壓電源模塊mc78m05以及0.1μF、0.33μF的電容組成電源電路,以提供5V的主電源Vcc(其允許誤差為±5%)。
2.2.2 系統(tǒng)設置電路
為使該系統(tǒng)正常運行,電路中通過DIP(S8)開關、跳線(J6)完成系統(tǒng)的初始設置。本方案中采用的默認設置為:DIP1~DIP3設為關閉狀態(tài),DIP4~DIP6設為打開狀態(tài);跳線分別使得J6-8和J6-9、J6-5和J6-6、J6-2和J6-1連通,從而將S8-1端、S8-2端設為高電平,S8-3端設為低電平;復位按鈕RESET默認為開。
2.2.3 通信電路
通信電路以MAX202為核心部件。MAX202芯片是一款較為常用的電平轉換芯片,可以實現(xiàn)RS-232電平與TTL電平的雙向轉換。該芯片內部有電壓倍增電路和轉換電路,僅需外接幾個小電容和+5V電源便可工作,使用十分方便;芯片中還有兩路發(fā)送、接收串行通信接口,與JP1連接器各相應引腳的連接總是從“出”到“入”和從“入”到“出”,因此要注意其發(fā)送、接收引腳的對應。MAX202需四個0.1μF電容配合,且要保證電容極性連接正確。A12 OEM板通過RS-232接口輸出二進制的測量數(shù)據(jù)信息,只有每次傳送的歷書是新的GPS衛(wèi)星信號時,接收的信息才為有效信息。
2.3 1PPS信息輸出電路
時間標志信息輸出電路用74HC14實現(xiàn)對時間信號的處理。74HC14是施密特觸發(fā)器,可驅動10個LS-TTL負載。由于施密特觸發(fā)器屬于電平觸發(fā),可用來將緩慢上升和下降的輸入信號加快,在電路中用于不規(guī)則波形的整形及變換。因此用它將A12 OEM板輸出的時間波形變換成規(guī)則的脈沖信號,從而輸出秒脈沖時間信息1PPS(1 Pulse Per Second)。標準GPS時間的秒脈沖輸出1PPS的誤差精度在±250ns范圍內。在絕對模式時,1PPS的調整精度為±250ns;在相對模式時,1PPS的調整精度為±1ms。時間標記信息輸出1PPS排除了時鐘漂移,每秒輸出一次并與GPS時間同步。
3 測量實驗與結果分析
在定位解算計算機上運行GPS監(jiān)控軟件,用戶通過該程序控制計算機與GPS接收機的通信,從而執(zhí)行相應的定位操作并顯示相應的輸出信息。為配合監(jiān)控軟件工作,利用外圍應用電路中的DIP開關及跳線對該接收系統(tǒng)進行設置,并把主串行口J4連接到計算機的串行接口COM1或COM2,把差分串行接口J5連接到差分信息源或其他GPS接收機的DGPS信息輸出端;在BNC插座J1上連接GPS天線。系統(tǒng)連接好后再接通外圍應用電源。所有的操作命令和數(shù)據(jù)請求都通過外圍應用電路及軟件發(fā)送、接收或解碼。在高精度定位中,用于位置解算的誤差源主要包括SA誤差、電離層誤差和對流層誤差等。采用差分技術可有效降低以上三種誤差。
本次實驗借用同濟大學GPS基準站的觀測數(shù)據(jù),在同濟大學中德學院大樓519室和西南樓門前草坪完成。系統(tǒng)連接好后,運行GPS監(jiān)控軟件并將串行接口的傳輸速率設置為默認值為9 600bps。靜止狀態(tài)觀測四小時,在水平方向上沿正東、正西、正南或者正北方向以1mm間隔移動至20mm,每移動一次觀測半小時,在豎直方向上也以1mm間隔移動至20mm,每移動一次觀測半小時。使用計算機采集到的數(shù)據(jù),用處理軟件進行數(shù)據(jù)處理。
實驗時把單點" title="單點">單點定位和差分定位的精度做了比較,解算是用自編仿真軟件對GPS基準站的數(shù)據(jù)進行處理,以精確測出基準站坐標為(-2848181.61685953 4647549.59891956 3311986.31800702)。下面介紹測量結果及分析。
(1) 單點定位和差分定位的比較
圖3和圖4分別給出了單點獨立定位和差分定位的X坐標和Y坐標的比較曲線。從圖中可以看出單點獨立定位與差分定位結果在X坐標上的偏差約為2米左右,而Y坐標的偏差約為4米左右。在本測量系統(tǒng)中X坐標測量值的精度要優(yōu)于Y坐標測量精度。
圖5給出了單點獨立定位和差分定位的高程坐標的比較曲線。從圖中可以看出,單點獨立定位與差分定位結果在高程坐標上的偏差約為10米左右。在GPS測量系統(tǒng)中,X、Y坐標測量值的精度要優(yōu)于高程坐標測量精度。
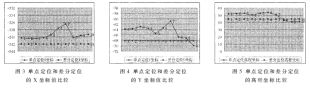
通過比較可以得出以下結論:經(jīng)過差分運算可以有效地剔除GPS測量系統(tǒng)誤差,提高測量精度。
(2) 精度分析
平差后矢量的技術指標
移動前后靜態(tài)測量時間約為1小時;本次測量的實際空間位移約為10mm,移動傾角為70°;水平方向位移分量為10×cos70=3.42mm;垂直分量為10×sin70=9.40mm。
測量數(shù)據(jù)的處理:
X1-X2=395035mm-395041mm=-6mm
Y1-Y2=147369mm-147373mm=-4mm
Z1-Z2=113931mm-113929mm=2mm
可得到定位誤差為:
δxy=3.42-7.2=-3.78mm
δz=9.4-2=7.4mm
根據(jù)仿真實驗分析可得,精度達到毫米級,水平方向定位精度較好,垂直方向較差。
本文論述了GPS的載波相位差分算法以及數(shù)據(jù)處理的數(shù)學模型,這是GPS定位技術軟件方面的核心部分。同時,設計了以A12 OEM板為核心的 GPS接收機,結合自行開發(fā)的數(shù)據(jù)處理軟件進行了測量實驗,結果表明,能實現(xiàn)高精度定位,定位精度滿足工程要求。實驗表明,該方案是完全可行的,并且由于采用了自行設計的后處理軟件開發(fā)工具,其成本相當?shù)汀4私邮諜C最突出的特點是體積小、功耗低(A12 OEM板的封裝尺寸為39mm×60mm×10mm,功耗<250mW),在實際應用中非常有意義。
參考文獻
1 李天文. GPS原理及應用.北京:科學出版社,2003:94~107
2 劉大杰. 全球定位系統(tǒng)(GPS)的原理與數(shù)據(jù)處理.上海:同濟大學出版社,2003
3 李曙光,荊便順,蘇彥民. GPS系統(tǒng)SA誤差模型的分析和建立. 長安大學學報(自然科學版),2002;(3)
4 施久亮. 用AT91R40008設計高動態(tài)GPS接收機.單片機與嵌入式系統(tǒng)應用,2004;(6)
5 劉基余. GPS衛(wèi)星導航定位原理與方法.北京:科學出版社,2003:147~196
6 高洪民等.12通道GPS接收機及其外圍電路設計.電子產(chǎn)品世界,2002;(8)