0 引言
鉛酸蓄電池由于其成本低、容量大、安全可靠等特點(diǎn),在通信、電動汽車、軍事、航空航天等各個領(lǐng)域都有廣泛的應(yīng)用。電池的性能好壞、使用壽命的長短直接影響到電子產(chǎn)品的使用壽命和使用安全;而充電器的好壞又直接影響到電池的使用壽命。因此研究低成本又有智能管理功能的充電器是有實際應(yīng)用價值的課題。
1 目前智能充電器的幾種結(jié)構(gòu)[1]
1.1 基于專用芯片的管理系統(tǒng)
現(xiàn)在,UNITRODE 公司已開發(fā)出系列電池管理專用芯片。因為電池管理中采用最多的就是控制充電電壓及充放電電流,電池管理芯片正是抓住了這一點(diǎn),為VRLA 電池研制了具有四狀態(tài)管理的專用控制芯片,可以智能地實現(xiàn)帶溫度補(bǔ)償?shù)乃臓顟B(tài)管理方案:涓流充電模式、大功率充電模式、過充電模式和浮充電模式。不同的電池要有不同的芯片控制,因此,用專用芯片做管理系統(tǒng)其靈活性較差,
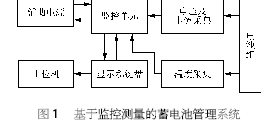
1.2 基于監(jiān)控測量的蓄電池管理系統(tǒng)
在給電池充電的過程中,涉及到電池工作電壓、工作電流、溫度等參數(shù),這些都是表征電池狀態(tài)的重要參數(shù)。采用傳感器提取這些參數(shù),然后再配合故障診斷、遙控遙測、自動報警和事故現(xiàn)場處理等功能,就可以組成一個電池管理系統(tǒng)。如圖1所示。
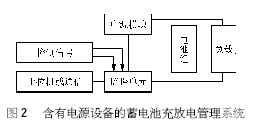
1.3 與電源設(shè)備一起構(gòu)成的蓄電池充放電管理系統(tǒng)
在通訊、供電系統(tǒng)中,為了保證電網(wǎng)掉電時蓄電池組能及時補(bǔ)充電能,在規(guī)定時間內(nèi)向負(fù)載供電,保證通信或電力合閘系統(tǒng)的正常運(yùn)轉(zhuǎn),通常是將電池組直接掛接在電源模塊輸出端。當(dāng)電網(wǎng)正常工作時,電池組工作在浮充狀態(tài),起到平滑濾波和保持容量(補(bǔ)充自放電的容量損失)的作用。一旦電網(wǎng)掉電,蓄電池組立即投入工作,當(dāng)電網(wǎng)恢復(fù),電源模塊立即對電池進(jìn)行充電。如圖2 所示。
這樣的一個系統(tǒng)由于和電源模塊聯(lián)系起來,所以,可以從充放電過程上來優(yōu)化電池工作狀態(tài),電池充電成為可控的過程,建立在這樣一個系統(tǒng)上的監(jiān)控單元應(yīng)該具有第一種監(jiān)控系統(tǒng)中所有功能,并且可以和電源模塊直接“對話”,根據(jù)要求對電池進(jìn)行管理,并且可以實時監(jiān)控電池的放電狀態(tài),對電池的工作進(jìn)行優(yōu)化[2]。因此,電池組的工作會更加可靠,可控性和智能化程度也會更高。但是這樣一個系統(tǒng)存在的主要問題是:
(1)沒有解決電池組串聯(lián)運(yùn)行過程中不均衡 現(xiàn)象的問題,這也是電池失效的重要原因之一;
(2)一般只完成了電池生產(chǎn)廠家提供的充電曲線,對于電池在使用過程中發(fā)生的其它問題控制不夠全面,例如深度放電后的涓充問題等。
在將來,充電器的發(fā)展方向是智能化、數(shù)字化、集成化。智能化可以使電池的管理做到全自動,無需人員監(jiān)管,真正做到免維護(hù)。數(shù)字化和集成化可以減少管理系統(tǒng)的體積和重量,減少系統(tǒng)的復(fù)雜度。
2 目前幾種充電方式[3]
鉛酸蓄電池的充電方法目前主要有恒流、恒壓、恒壓限流、脈沖充電、Reflex充電法。
2.1 恒流充電
恒流充電方式是一種簡單的充電方法。但是,恒流充電有其局限性:對電池過充電就會造成電池壽命的縮短,而過小電流又會延長充電時間。
2.2 恒壓充電
恒壓充電用簡單的控制方法很容易就能實現(xiàn)。在充電的初始階段,由于電池的電壓很低而造成充電電流很大,這對電池會造成損害。當(dāng)電池電壓達(dá)到一定值之后,電流就會隨之減小。這種充電方法的缺點(diǎn)就是會造成溫度上升和電池的壽命減少,并且在開始時電流很大,而后來快充滿時電流又很小,就無法充分利用充電器的容量。
2.3 恒壓限流法
恒壓限流法實際上是將恒壓充電和恒流充電相結(jié)合,又可稱為混合充電法。在充電開始階段,由于電池電壓過低,為避免電流過大而損壞電池,就采用恒流充電法來限制充電電流。但電壓達(dá)到預(yù)定值時,進(jìn)入恒壓充電方式。恒壓限流方式是大多數(shù)電池廠商推薦的充電方式。由于蓄電池充電電壓較低,充電后期電流很小,因此電解液中產(chǎn)生的氣泡很少,可以節(jié)省電能、降低蓄電池的溫升,避免損壞電池的極板。恒壓限流方式是一種很有效的充電方式,加上過充判斷、浮充控制、溫度補(bǔ)償?shù)染涂梢孕纬梢粋€簡單的充電管理系統(tǒng),蓄電池可以在這個系統(tǒng)下更好地工作。
2.4 脈沖充電[4]
在充電過程中,只要充電電流不超過蓄電池可接受的電流,蓄電池內(nèi)部就不會產(chǎn)生大量的氣泡。蓄電池中產(chǎn)生的極化現(xiàn)象會阻礙充電,并且使出氣率和溫升顯著升高。因此,極化電壓是影響充電速度的重要因素。用周期性的脈動電流給電池充電可以使電池有時間恢復(fù)其原來狀態(tài),減小極化現(xiàn)象的影響,解決快速充電面臨的難題。但是目前這種充電方式還在研究階段,對于采用多大的脈沖周期,占空比又是多少之類的具體問題還沒有一個定論。
2.5 ReflexTM充電方式
Reflex 充電方法是脈沖電流法的改進(jìn):一個周期是由一個正脈沖后加一個負(fù)脈沖,然后才是空閑時段。這樣就強(qiáng)制消除電池的極化現(xiàn)象,使得電池充電時可以更快而又不損害電池的使用壽命。這種充電方式與脈沖充電方式一樣,仍然處于研究階段。
3 數(shù)字式智能充電器的設(shè)計
3.1 系統(tǒng)結(jié)構(gòu)和充電方案的設(shè)計
本文中設(shè)計的系統(tǒng)是一個針對12 V/(200~500Ah)的鉛酸蓄電池智能充電系統(tǒng)。采用半橋作為主功率拓?fù)洌_關(guān)頻率取80kHz左右。
對于一個智能管理系統(tǒng),控制模塊無異于它的大腦。充電器的所有動作都是由它來決定和控制的,所以控制模塊的選擇關(guān)系到整個系統(tǒng)的優(yōu)劣。由于系統(tǒng)需要多個A/D 轉(zhuǎn)換器,但不需要擴(kuò)展存儲器也不需要通訊,根據(jù)以上特點(diǎn)我們選擇了MICROCHIP 公司的PIC 系列PIC16C73 單片機(jī)。
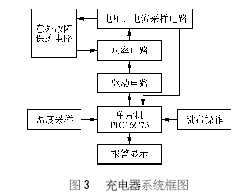
圖3 所示為智能充電器的系統(tǒng)框圖。單片機(jī)是智能充電器的核心部件,它根據(jù)電流、電壓采樣以及溫度采樣做出溫度補(bǔ)償后的PWM波形輸出,經(jīng)過驅(qū)動電路提供給功率電路,并且決定了智能充電器的工作狀態(tài),可以在必要的情況下做出保護(hù)動作。意外故障保護(hù)電路可以在單片機(jī)失效的情況下對電路進(jìn)行強(qiáng)制保護(hù),起到雙重保險的作用。報警顯示部分用若干個LED表示系統(tǒng)的運(yùn)行狀態(tài),簡單有效。
充電方式采用恒壓限流法。恒壓限流充電模式分兩個階段,第一階段是恒流階段,即系統(tǒng)給定電流值,給電池以恒定電流充電,當(dāng)電池的電壓達(dá)到系統(tǒng)給定的轉(zhuǎn)化值,就轉(zhuǎn)為第二階段———恒壓階段。恒壓轉(zhuǎn)化值會影響充入電量的多少。
由圖4 可知,當(dāng)恒壓轉(zhuǎn)化值(Vref)設(shè)置的較低時,充入的電量不足(圖中陰影部分就是少充入的容量),沒有充分利用電池的容量,長期工作,會引起電池容量丟失,這就要求把恒壓轉(zhuǎn)化值設(shè)高。但是恒壓值較高,容易在充電末期引起過充電,這同樣會導(dǎo)致電池容量丟失。
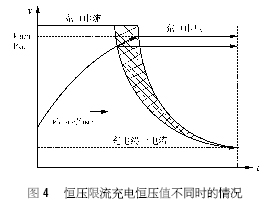
為了解決這個矛盾,系統(tǒng)引進(jìn)了第三個階段———浮充階段,這樣就可以把恒壓轉(zhuǎn)化值設(shè)置的比普通恒壓限流模式高,這樣可以保證充入足夠的電量,在充電末期轉(zhuǎn)入浮充階段,用稍低的電壓浮充充電,從而保證不會過充電。
三階段充電方法保證了充電末期不過充,同時又能達(dá)到滿充的目的,是一種成本較低的通用蓄電池充電解決方案。
3.2 軟件系統(tǒng)的設(shè)計
圖5 為系統(tǒng)軟件的程序流程圖。根據(jù)電池的端電壓決定充電器工作在何種充電狀態(tài)。
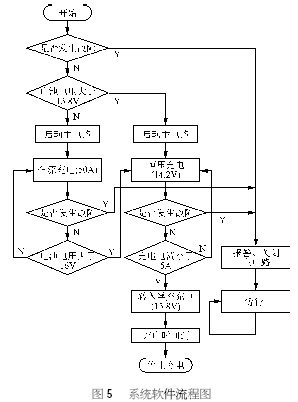
我們做的是全數(shù)字化的改良型PI 調(diào)節(jié)環(huán),由于PI 調(diào)節(jié)的積分環(huán)在前期對誤差進(jìn)行積累,為了不讓積累的誤差影響系統(tǒng)的穩(wěn)定性,所以我們在誤差等于0 時,對原有積累的誤差清零。當(dāng)誤差等于±1 時,只進(jìn)行積分運(yùn)算,減慢調(diào)整速度,避免產(chǎn)生振蕩。
鉛酸蓄電池的充電電壓需要根據(jù)環(huán)境溫度進(jìn)行調(diào)整,以-4 mV/℃的補(bǔ)償系數(shù)來調(diào)整。因此我們加入了溫度補(bǔ)償?shù)墓δ堋?br />
4 實驗結(jié)果
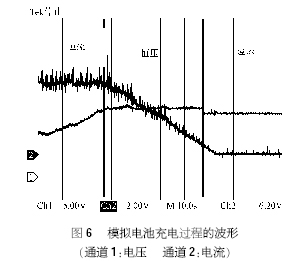
圖6 為用電子負(fù)載模擬電池三階段充電過程的波形圖。從圖6 中我們可以看出智能充電系統(tǒng)能夠方便地實現(xiàn)各個充電狀態(tài)的轉(zhuǎn)換。
5 結(jié)語
用PIC 單片機(jī)可以實現(xiàn)全數(shù)字化的電池充電管理,結(jié)構(gòu)簡單,成本較低,并且具有很高的靈活性,通過改變軟件內(nèi)設(shè)置的恒流參考值和恒壓參考值就可以改變系統(tǒng)的恒流電流和恒壓電壓值,使得系統(tǒng)在不改變系統(tǒng)硬件設(shè)計的情況下實現(xiàn)給多種不同容量的鉛酸蓄電池充電。另外可以實現(xiàn)有效的電池充電管理和保護(hù)功能,達(dá)到智能化控制。
