
引 言
較之傳統(tǒng)的單電源供電而言,并聯(lián)電源具有很多優(yōu)點,如可實現(xiàn)大容量、高效率,能夠達到較高的可靠性,能夠根據(jù)需要配置成為冗余系統(tǒng),能夠?qū)崿F(xiàn)電源的模塊化等。而幾個DC/DC模塊并聯(lián)運行時,如果能夠?qū)崿F(xiàn)各模塊的交錯運行,則可以減小總的電壓和電流紋波幅值,提高紋波頻率,從而提高輸出電壓電流的質(zhì)量。對一臺CCM模式運行的N模塊并聯(lián)電源系統(tǒng)而言,實現(xiàn)交錯運行將使得系統(tǒng)的紋波幅值較之單模塊大為減小,而紋波頻率則提高N倍。
交錯運行方案已被廣泛采用于DC/DC并聯(lián)電源系統(tǒng)中,不過現(xiàn)有方案多采用集中式控制,通過一個獨立的控制模塊產(chǎn)生一系列頻率相同而相位差為2πPN的觸發(fā)脈沖來驅(qū)動相應的變換器。這種方案優(yōu)點是控制簡單,但其缺點也顯而易見,即該方案難以適應模塊數(shù)目變化的情況。此外集中控制單元的采用也使得系統(tǒng)的可靠性極大地取決于控制單元的可靠性,提高了系統(tǒng)的運行風險。為了解決集中式控制的不足,有文獻提出了一種基于交錯線的自動交錯控制方案,該方案采用分布式控制,能夠適應模塊數(shù)目變化的情況,而且分布式控制的采用也降低了系統(tǒng)由于集中式控制單元而帶來的運行風險。較之傳統(tǒng)的集中式控制方案而言,這種控制方案的優(yōu)勢是很明顯的,但其缺點也很明顯,那就是交錯線的引入一方面使得系統(tǒng)的模塊化無法真正實現(xiàn),另一方面,交錯線極易受到干擾,這使得系統(tǒng)的可靠性受到影響。
為了解決現(xiàn)有交錯運行控制方案的缺點,本文研究了一種無交錯線自動交錯控制方案,這種方案采用分布式控制,而且不需要交錯線,能夠提高系統(tǒng)運行的可靠性,并且實現(xiàn)真正的模塊化。
無交錯線自動交錯原理
基于無交錯線自動交錯控制方案的三模塊并聯(lián)系統(tǒng)的電路結(jié)構(gòu)圖如圖1所示,其中主電路采用普通BUCK變換器。由于模塊2、3的結(jié)構(gòu)與模塊1完全一樣,故而簡化之。
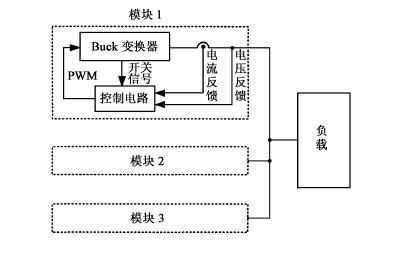
圖1 三模塊并聯(lián)系統(tǒng)結(jié)構(gòu)圖
從圖1可以看出,三個參與并聯(lián)的模塊只有輸出端通過負載相互連接,此外模塊之間再無其他連接線。在每個模塊中,主電路向控制電路反饋輸出電壓、本模塊輸出電流以及本模塊主電路主開關管的開關信號,而控制電路向主電路提供PWM控制信號來控制主電路主開關管的導通與關斷。
該方案原理如圖2所示,主要由脈沖整形單元、異地時鐘獲取環(huán)節(jié)、鎖相環(huán)電路以及PWM控制信號發(fā)生電路構(gòu)成。
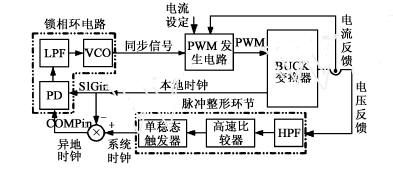
圖2 控制電路原理框圖
由圖可知,系統(tǒng)時鐘是通過提取輸出電壓中的尖峰脈沖成分并對其進行處理而得到的。由于不同模塊通過的傳輸路徑的差別,因此提取到的尖峰脈沖幅值不一,必須首先進行“整形”,這可以通過高速比較器來實現(xiàn)。經(jīng)過高速比較器后得到的系統(tǒng)開關信號中,對應于每次開關時刻可能有多個窄方波。為了確保對應于每個開關時刻只有一個開關信號,還需要用單穩(wěn)態(tài)觸發(fā)器對高速比較器輸出信號進行處理。此后,得到的一系列脈寬相等幅值相同的窄方波便為與系統(tǒng)每個開關動作對應的系統(tǒng)時鐘,如圖3所示。其中,波形R1是經(jīng)過高通濾波后的電壓尖峰脈沖,波形1是經(jīng)過高速比較器“整形”后得到的一系列窄脈沖,而波形2則是單穩(wěn)態(tài)觸發(fā)器輸出的對應于系統(tǒng)各次開關動作的系統(tǒng)時鐘的。
得到系統(tǒng)時鐘后,便可以通過系統(tǒng)時鐘與本地時鐘之間的邏輯運算來獲得異地時鐘。為了實現(xiàn)系統(tǒng)中各模塊的交錯運行,則必須實現(xiàn)各模塊對應時鐘的交錯運行,在本方案中,這通過各模塊控制電路中的鎖相環(huán)電路來實現(xiàn)。
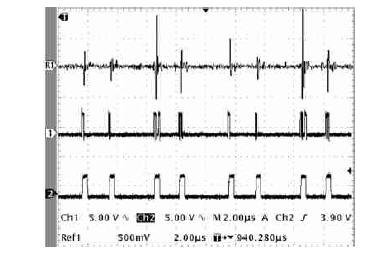
圖3 系統(tǒng)時鐘信號的提取
以兩模塊并聯(lián)的情況為例,圖4所示波形2為本地模塊時鐘,波形1為異地模塊時鐘,由圖可知,此時,本地模塊時鐘頻率小于異地模塊,鑒相器檢測模塊時鐘的上升沿得到3所示波形,低通濾波后得到本地VCO輸入,是一個漸升的直流電壓,從而使得本地VCO輸出頻率提高,將此VCO的輸出脈沖作為本地模塊的 SYNC同步,則可以使本地時鐘頻率上升。而對異地模塊而言,其VCO輸入是一個漸降的直流電壓,則可以使其時鐘頻率下降。這樣通過本地模塊和異地模塊時鐘頻率的反方向調(diào)整,最終即可實現(xiàn)頻率同步。
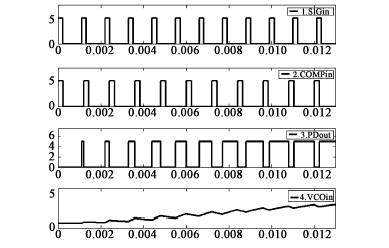
圖4 兩模塊并聯(lián)系統(tǒng)頻率同步的實現(xiàn)
如果兩個模塊的VCO壓頻特性一致(這可以通過調(diào)節(jié)鎖相環(huán)的外部電路參數(shù)實現(xiàn)),且我們事先設定他們的初始振蕩頻率(offset frequency)也就是VCOin=0V時的振蕩頻率相同,那么,最終實現(xiàn)頻率同步時,兩模塊的VCOin也一定相等,則兩模塊的相位必然交錯180 度。
圖5為三模塊交錯結(jié)果示意圖,其中波形1為本地模塊檢測到的系統(tǒng)時鐘,為一系列等寬的窄方波脈沖,每個窄方波對應系統(tǒng)中某個模塊的一次開關動作(開通或者關斷);波形2為從系統(tǒng)時鐘里除去本地時鐘后剩下的部分,即異地時鐘,反映了系統(tǒng)中本地模塊之外的其他模塊的開關時鐘信息。在本地模塊控制電路中,鎖相環(huán)電路根據(jù)所檢測的異地模塊開關時鐘信息(波形2)與本地開關脈沖(波形3)進行鑒相,鑒相器輸出結(jié)果為一周期變化的矩形方波,如波形4所示。在一個周期內(nèi),該方波上升沿對應本周期內(nèi)異地時鐘信號的第一個上升沿,下降沿對應本地開關信號的上升沿。除了本周期的第一個上升沿之外的其他異地時鐘信號的所有邊沿均為無效信號,在系統(tǒng)中不起作用。對于系統(tǒng)中其他兩個模塊,也是如此,對應的鑒相器輸出結(jié)果分別如波形5、6所示。
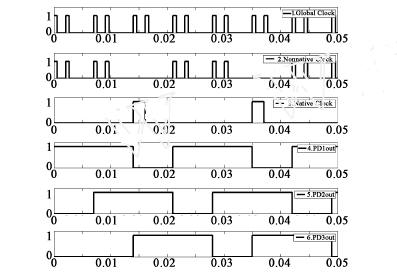
圖5 三模塊并聯(lián)系統(tǒng)交錯示意圖
本文所提的方案能夠?qū)崿F(xiàn)系統(tǒng)的自動交錯運行,具體過程如圖6所示。系統(tǒng)本來有三個模塊并聯(lián)運行,每個模塊交錯120度,分別記作模塊1、模塊2、模塊3。其中模塊1和模塊2的開關脈沖如圖中波形1、2中實線波形所示。
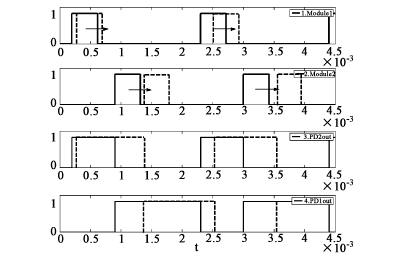
圖6 自動交錯的實現(xiàn)
在某個時刻,模塊3退出運行,系統(tǒng)變成兩模塊并聯(lián)運行。在變化瞬間,對模塊2而言,其控制電路中鑒相器的輸出發(fā)生突變,輸出矩形方波占空比降低,如圖中波形3中實線波形所示,這導致模塊2的開關頻率降低,在圖中表現(xiàn)為它的開關脈沖“右移”。
對于模塊1而言,在系統(tǒng)發(fā)生變化的瞬間,其鑒相器的輸出不會發(fā)生突變,而隨著模塊2的開關頻率降低,則模塊1控制電路中鑒相器的輸出矩形方波占空比也將逐漸降低,而這也將導致模塊1的開關頻率逐漸降低,在圖中也表現(xiàn)為它的開關脈沖“右移”。
經(jīng)過一段時間的調(diào)整后,模塊1和模塊2將達到一個新的穩(wěn)定狀態(tài),兩者的開關頻率將再次相同,此時,兩個模塊必然互相交錯180度。系統(tǒng)達到新的交錯狀態(tài),如圖6中的虛線波形所示。
在本方案中,PWM信號是通過SG3525芯片產(chǎn)生的。鎖相環(huán)輸出信號用作PWM信號發(fā)生電路的同步端,而所產(chǎn)生的PWM脈沖占空比則由電流設定與電流反饋的誤差進行調(diào)節(jié)。
實驗結(jié)果
為了驗證本文所提無交錯線自動交錯控制方案是否可行,我們設計了一臺基于該控制方案的實驗樣機。樣機由三個相同的小功率BUCK電路并聯(lián)而成,輸入電壓30~50V,開關頻率95~105KHz,負載為純電阻,8~15Ω。
圖7為三模塊并聯(lián)的BUCK變換器系統(tǒng)波形,其中信號R1、R2和R3為三個模塊的PWM開關信號,由圖可見,此三個信號彼此交錯120度,表明系統(tǒng)工作在交錯運行狀態(tài)。
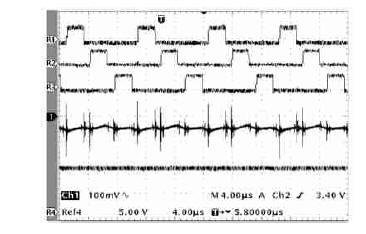
圖7 三模塊并聯(lián)交錯運行波形圖
信號1為系統(tǒng)輸出電壓的交流成分,包括紋波和電壓尖峰脈沖,對應的刻度為50mV/div。此時的電壓紋波峰2峰值為24.7mV,是比較低的,而紋波頻率則為系統(tǒng)開關頻率的三倍,符合前文對交錯運行效果的分析。
信號R4為此時的輸出電壓波形,刻度為5V/diV,此時輸出電壓為9.6V,電壓平直程度較好,無明顯紋波成分。
圖8顯示了該系統(tǒng)自動交錯運行功能的實現(xiàn)。初始系統(tǒng)有三個模塊并聯(lián)并且運行在交錯狀態(tài),其中信號1、2和信號R2為初始參與并聯(lián)運行的三個模塊的PWM主開關信號,彼此交錯120度。在某個時刻,其中的一個模塊(對應PWM主開關信號2)因成了一條直線。此時,系統(tǒng)的自動交錯功能開始起作用。由圖8可見剩余兩模塊(對應PWM主開關信號1和R2)由彼此交錯120度逐漸向彼此交錯180度過渡,在經(jīng)過若干周期后實現(xiàn)彼此交錯180度運行,即達成了兩模塊并聯(lián)時的交錯運行狀態(tài)。信號R1顯示的是這個過程中系統(tǒng)輸出電壓紋波變化情況。
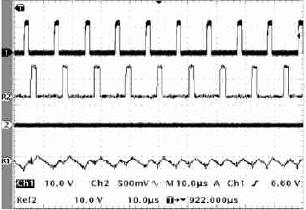
圖8 自動交錯實現(xiàn)過程
為了驗證交錯運行的實際效果,我們還設計了一組對照實驗,通過使兩模塊并聯(lián)系統(tǒng)分別運行在并聯(lián)同步、并聯(lián)不控以及并聯(lián)交錯運行狀態(tài),比較各自輸出電壓紋波之間的差別來驗證交錯運行確實能夠降低輸出電壓的紋波幅值,并且提高輸出電壓的紋波頻率。
在圖9中,兩個模塊的PWM主開關信號頻率相同且彼此同相,因此處于同步運行狀態(tài),此時,兩模塊出電壓紋波的波峰無相差,二者彼此重疊,因此,輸出電壓的紋波比較明顯,幅值比較高,峰2峰值為1.1V,紋波的頻率與系統(tǒng)開關頻率一致。
在圖10中,兩個模塊的PWM主開關信號相互獨立,二者的頻率有差別,體現(xiàn)為兩個信號的相位差呈現(xiàn)周期性變化,而表現(xiàn)在輸出電壓上則是輸出電壓的紋波幅值時大時小,在0.5V至1.0V間呈現(xiàn)周期性變化,變化的周期跟兩個PWM主開關信號的頻率差有關。
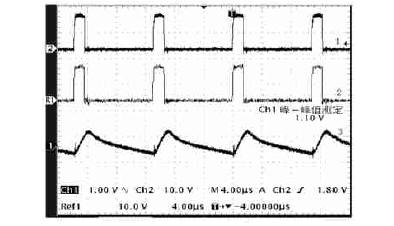
圖9 兩模塊并聯(lián)系統(tǒng)同步運行

圖10 兩模塊并聯(lián)系統(tǒng)獨立運行
在圖11中,兩模塊的PWM主開關信號頻率相同,相位互相交錯180度,因此處在交錯運行狀態(tài),此時兩模塊輸出電壓的紋波波峰彼此錯開,表現(xiàn)為輸出電壓紋波幅值較低,峰2峰值為0.56V,而紋波頻率則提升為系統(tǒng)開關頻率的兩倍。
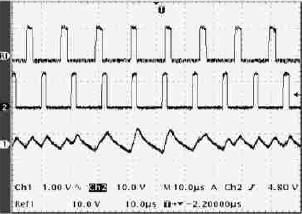
圖11 兩模塊并聯(lián)系統(tǒng)交錯運行
通過這組對照實驗可以看出,并聯(lián)系統(tǒng)的交錯運行確實能夠降低系統(tǒng)輸出電壓的紋波幅值,并且提高紋波頻率。
結(jié) 論
通過以上分析可知,本文所提方案在原理上是可行的,可以實現(xiàn)并聯(lián)系統(tǒng)的交錯運行。當系統(tǒng)參與并聯(lián)的模塊數(shù)目發(fā)生變化時,系統(tǒng)能夠自動進行調(diào)整并最終達到新的交錯狀態(tài)。樣機實驗的結(jié)果也表明,本方案確實能夠達到預期的效果。