
摘 要: 將基于共享機(jī)制的遺傳算法" title="遺傳算法">遺傳算法" title="小生境遺傳算法" title="小生境遺傳算法">小生境遺傳算法">小生境遺傳算法應(yīng)用到足球機(jī)器人" title="足球機(jī)器人">足球機(jī)器人路徑規(guī)劃" title="路徑規(guī)劃">路徑規(guī)劃中,對(duì)比其他算法說明其在求解多峰值函數(shù)優(yōu)化計(jì)算問題時(shí)具有時(shí)間最優(yōu)性,并能保持解的多樣性,具有很高的全局尋優(yōu)能力和收斂速度" title="收斂速度">收斂速度。通過仿真試驗(yàn)證明了小生境遺傳算法在路徑尋優(yōu)過程中的有效性和正確性。
關(guān)鍵詞: 路徑規(guī)劃 小生境遺傳算法 全局尋優(yōu)
足球機(jī)器人系統(tǒng)是一個(gè)典型的且非常具有挑戰(zhàn)性的多智能體系統(tǒng)。在足球機(jī)器人比賽中,路徑規(guī)劃的主要目的是在充滿對(duì)抗的賽場上規(guī)劃出一條滿足某項(xiàng)評(píng)價(jià)指標(biāo)的無碰撞路徑。路徑規(guī)劃主要應(yīng)用于機(jī)器人底層策略中。作為足球機(jī)器人基本動(dòng)作實(shí)現(xiàn)的基礎(chǔ),路徑規(guī)劃的優(yōu)劣將直接影響動(dòng)作的實(shí)時(shí)性和準(zhǔn)確性。因此,每個(gè)足球機(jī)器人研究者都把它作為一個(gè)研究重點(diǎn)。全局路徑規(guī)劃一般包括環(huán)境建模和搜索策略2個(gè)子問題。其中環(huán)境建模的主要方法有:可視圖法、自由空間法和柵格法[1]等。目前常用的搜索技術(shù)有:梯度法[4][5]、 A*等圖搜索方法、枚舉法和隨機(jī)搜索法等。而這些方法也存在一些問題:梯度法易陷入局部最小點(diǎn),圖搜索方法和枚舉法不能用于高維的優(yōu)化問題,隨機(jī)搜索法計(jì)算效率太低。本文將基于小生境的遺傳算法用于足球機(jī)器人路徑規(guī)劃中,改進(jìn)了傳統(tǒng)算法的性能,同時(shí)具有很高的全局尋優(yōu)能力和收斂速度,同時(shí)可進(jìn)一步提高解的精度。
1 小生境遺傳算法[2][6]
在自然界中,特征、性狀相似的物種往往相聚在一起,并在同劣種交配繁衍后代。在基本的遺傳算法(SGA)中,交配完全是隨機(jī)的,雖然這種隨機(jī)化的雜交形式在尋優(yōu)的初級(jí)階段保持了解的多樣性,但在進(jìn)化的后期,大量個(gè)體集中于某一極值點(diǎn)上,它們的后代造成了近親繁殖。遺傳算法由于其強(qiáng)大的全局搜索能力,求解多峰值函數(shù)的優(yōu)化計(jì)算時(shí),一般只能找到個(gè)別的幾個(gè)最優(yōu)解,甚至得到的是局部最優(yōu)解;由于搜索的隨機(jī)性,因而解的精度不高。為了使優(yōu)化算法能夠找到全部的最優(yōu)解,引進(jìn)小生境的概念。
本文使用一種可標(biāo)記進(jìn)化方向的小生境遺傳算法DRN-GA(Direction Record Niche Genetic Algorithm),特點(diǎn)是:基于“分享機(jī)制”更好地保持解的多樣性,同時(shí)具有很高的全局尋優(yōu)能力和收斂速度;利用進(jìn)化過程中的有用信息,為每個(gè)個(gè)體標(biāo)記進(jìn)化方向。執(zhí)行DRN-GA算法后,若以每個(gè)個(gè)體為初始點(diǎn),按標(biāo)記的進(jìn)化方向繼續(xù)局部尋優(yōu),會(huì)進(jìn)一步提高解的精度。
1.1 個(gè)體編碼結(jié)構(gòu)
個(gè)體編碼中除應(yīng)包含決策變量的編碼外,還要有記憶進(jìn)化方向的部分。為適應(yīng)本算法,設(shè)計(jì)個(gè)體編碼方案如下示:
1.2 小生境實(shí)現(xiàn)原理及適應(yīng)度函數(shù)的確立
小生境技術(shù)就是將每一代個(gè)體劃分為若干類,每類中選出若干適應(yīng)度較大的個(gè)體作為一個(gè)類的優(yōu)秀代表組成一個(gè)種群,再在種群中以及不同種群之間通過雜交、變異產(chǎn)生新一代個(gè)體群,同時(shí)采用預(yù)選擇機(jī)制、排擠機(jī)制或分享機(jī)制完成選擇操作。基于這種小生境技術(shù)的遺傳算法NGA(Niched Genetic Alogorithm)可以更好地保持解的多樣性,同時(shí)具有很高的全局尋優(yōu)能力和收斂速度,特別適用于復(fù)雜多峰函數(shù)的優(yōu)化問題。
在普通遺傳算法的進(jìn)化過程中,每一代進(jìn)行選擇、交叉、編譯操作之前加入如下操作:通過個(gè)體之間的相似程度的共享函數(shù)調(diào)整群體中個(gè)體的適應(yīng)度,從而在群體的進(jìn)化過程中,算法能依據(jù)該調(diào)整后的新適應(yīng)度進(jìn)行選擇操作,以維護(hù)群體的多樣性,創(chuàng)造出小生境的進(jìn)化環(huán)境。共享函數(shù)是表示群體中兩個(gè)個(gè)體之間密切關(guān)系程度的一個(gè)函數(shù),可記為S(dij),其中dij表示個(gè)體i和個(gè)體j之間的某種關(guān)系。適應(yīng)度共享函數(shù)的直接目的是將搜索空間的多個(gè)不同峰值在地理上區(qū)分開來,每個(gè)峰值處接受一定比例數(shù)目的個(gè)體,比例大小與峰值高度有關(guān)。為實(shí)現(xiàn)這樣的分布,共享法將個(gè)體的目標(biāo)適應(yīng)度降低,即適應(yīng)度值fi除以一個(gè)niche計(jì)數(shù)mi獲得共享函數(shù),niche計(jì)數(shù)mi作為個(gè)體鄰集密集程度的估計(jì)。mi=![]() 其中,d[i,j]是個(gè)體i和j的距離,Sh[d]是共享函數(shù),此函數(shù)遞減,Sh[0]=1和Sh[d≥σshare]=0。
其中,d[i,j]是個(gè)體i和j的距離,Sh[d]是共享函數(shù),此函數(shù)遞減,Sh[0]=1和Sh[d≥σshare]=0。
采用一種將海明距離測度(基因型差異)與適應(yīng)度距離(表現(xiàn)型差異)相結(jié)合的方法。若d1(xi,xj)為任意兩個(gè)個(gè)體xi和xj的海明距離,d2(xi,xj)是適應(yīng)度距離,這時(shí)共享函數(shù)可定義為:

其中,σ1和σ2是niche的半徑,即分別為基因型和表現(xiàn)型的作為一個(gè)niche內(nèi)的個(gè)體最大距離。個(gè)體的適應(yīng)度函數(shù)在共享后變?yōu)槿缦滦问剑?BR> 
1.3 進(jìn)化方向的確立
設(shè)單變量函數(shù)y=g(x),且x1-x2〈ρ,ρ為一較小正數(shù)。設(shè)目標(biāo)函數(shù)為J=max[g(x)]。進(jìn)化示意圖如圖1所示。由圖1知,x1比x2更優(yōu)。根據(jù)x1〈x2,g(x1)〉g(x2)及x1-x2〈ρ可知,在x1的一個(gè)鄰域內(nèi)g(x)是下降的,可推出,存在一很小正數(shù)ε,使得g(x1-ε)〉g(x1),即x1-ε比x1更優(yōu)的點(diǎn),所以x1的進(jìn)化方向?yàn)?1。

2 小生境遺傳操作步驟
小生境遺傳操作步驟:(1)根據(jù)編碼方案,把路徑點(diǎn)編碼成位串形式,轉(zhuǎn)化為染色體(路徑)。(2)選擇合適的參數(shù):群體的大小(所含個(gè)體數(shù)目)、交叉概率Pc和變異概率Pm。(3)隨機(jī)產(chǎn)生一個(gè)初始群體即N條路徑![]() 。(4)根據(jù)適應(yīng)值函數(shù)計(jì)算每條路徑的適應(yīng)值f(pi(t)),為適應(yīng)度較大者標(biāo)記進(jìn)化方向,根據(jù)個(gè)體的適應(yīng)度按比例選擇N個(gè)個(gè)體。(5)選擇:計(jì)算每一條路徑的選擇概率P=
。(4)根據(jù)適應(yīng)值函數(shù)計(jì)算每條路徑的適應(yīng)值f(pi(t)),為適應(yīng)度較大者標(biāo)記進(jìn)化方向,根據(jù)個(gè)體的適應(yīng)度按比例選擇N個(gè)個(gè)體。(5)選擇:計(jì)算每一條路徑的選擇概率P= 及累計(jì)概率qi=∑pj,j=1,…,i。(6)交叉:對(duì)每條路徑產(chǎn)生[0,1]間隨機(jī)數(shù)r,如果r〈Pc,則該條路徑參加交叉操作,如此選出參加交叉的一組路徑后,隨機(jī)配對(duì);對(duì)每一對(duì),產(chǎn)生[0,1]間的隨機(jī)數(shù)以確定交叉的位置。(7)變異:如果變異概率為Pm,則可能變異的位數(shù)的期望值為P·n·N(n為染色體串長,N為群體)。(8)如果新個(gè)體數(shù)未達(dá)到M,則轉(zhuǎn)向第(5)步繼續(xù)進(jìn)行遺傳操作,否則代數(shù)加1,d=d+1;將新群體的M 條路徑的適應(yīng)值由大到小進(jìn)行排序,保存適應(yīng)值最大的路徑點(diǎn);如果d≠g(g是設(shè)定的代數(shù)),則轉(zhuǎn)向第(4)步,否則選用g代替f中最優(yōu)的路徑上的點(diǎn)。
及累計(jì)概率qi=∑pj,j=1,…,i。(6)交叉:對(duì)每條路徑產(chǎn)生[0,1]間隨機(jī)數(shù)r,如果r〈Pc,則該條路徑參加交叉操作,如此選出參加交叉的一組路徑后,隨機(jī)配對(duì);對(duì)每一對(duì),產(chǎn)生[0,1]間的隨機(jī)數(shù)以確定交叉的位置。(7)變異:如果變異概率為Pm,則可能變異的位數(shù)的期望值為P·n·N(n為染色體串長,N為群體)。(8)如果新個(gè)體數(shù)未達(dá)到M,則轉(zhuǎn)向第(5)步繼續(xù)進(jìn)行遺傳操作,否則代數(shù)加1,d=d+1;將新群體的M 條路徑的適應(yīng)值由大到小進(jìn)行排序,保存適應(yīng)值最大的路徑點(diǎn);如果d≠g(g是設(shè)定的代數(shù)),則轉(zhuǎn)向第(4)步,否則選用g代替f中最優(yōu)的路徑上的點(diǎn)。
3 精確優(yōu)化
DRN-GA執(zhí)行后,得到的種群每個(gè)個(gè)體中都保存了進(jìn)化方向。局部尋優(yōu)沿進(jìn)化方向以步長step尋找更優(yōu)解, 對(duì)每個(gè)個(gè)體沿進(jìn)化方向繼續(xù)搜索,可進(jìn)一步提高解的精度。兩算法可串行執(zhí)行。精確優(yōu)化結(jié)構(gòu)示意圖如圖2所示。

4 仿真
算法的搜索能力和優(yōu)化精度在路徑規(guī)劃中的應(yīng)用性能,可以通過下述函數(shù)及其仿真圖形驗(yàn)證。函數(shù)精度為0.01,每個(gè)變量所占的二進(jìn)制編碼長度為9,個(gè)體編碼為20位,種群數(shù)目為100,終止代數(shù)為100,交叉概率為Pc=0.6,變異概率Pm=0.002,運(yùn)行次數(shù)為40。
(1)Gauss函數(shù)
選取函數(shù):
f1(x,y)=xsin(4πx)-ysin(4πy+π)+1
x,y∈[-1,2],f1*(1.6289,1.6289)=4.2539
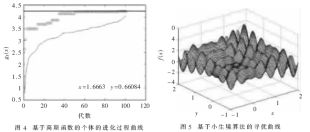
采用高斯函數(shù)和基于小生境算法的尋優(yōu)曲線及其個(gè)體的進(jìn)化過程曲線分別如圖3~圖6所示。
小生境遺傳算法與基本遺傳算法的性能對(duì)比如表1所示。

(2)Chaos-cat mapping函數(shù)[3]
選取函數(shù):
 X是一個(gè)兩輸入向量,[X1,X2]∈[0,100]2。基于Chaos-cat mapping函數(shù)和小生境算法的尋優(yōu)曲線和個(gè)體進(jìn)化過程曲線分別如圖7~圖10所示。
X是一個(gè)兩輸入向量,[X1,X2]∈[0,100]2。基于Chaos-cat mapping函數(shù)和小生境算法的尋優(yōu)曲線和個(gè)體進(jìn)化過程曲線分別如圖7~圖10所示。

?

?

?

改進(jìn)算法與基本遺傳算法的性能對(duì)比如表2所示。

從上述圖及表中可以看出,在求解多峰值函數(shù)的優(yōu)化計(jì)算問題時(shí),采用小生境遺傳算法可以在很短的時(shí)間內(nèi)尋到最優(yōu)解,從而達(dá)到節(jié)省時(shí)間的目的,同時(shí)可以很好地保持解的多樣性,具有很高的全局尋優(yōu)能力和收斂速度。仿真結(jié)果有效地證明了小生境遺傳算法在路徑尋優(yōu)過程中的有效性和正確性。
參考文獻(xiàn)
1 王醒策,張汝波,顧國昌.基于勢場柵格法的機(jī)器人全局路徑規(guī)劃[J].哈爾濱工程大學(xué)學(xué)報(bào),2003;(4):170~174
2 Holland J H.Adaptation in natural and artificial systems[M].Michigan:The University Of Michigan Press,Ann Arbor,1975
3 宋春雨.基于混沌映射同步理論的加密算法及其掩蓋保密通信系統(tǒng)設(shè)計(jì)[M].哈爾濱:哈爾濱工業(yè)大學(xué)出版社,2001
4 吳麗娟,徐心和.基于遺傳算法的足球機(jī)器人比賽中障礙回避策略的設(shè)計(jì)[J].機(jī)器人,2001;(3):142~145
5 Ge S S,Cui Y J.New potential functions for robot path plan-ning.IEEE Transactions on Robotics and Automation,2000;16(5)
6 Sugibara K,Smith J.Genetic algorithms for adaptive motion planning of autonomous mobile robots.In:Problems IEEE Trans SMC SIM1997,USA,1997