
SAR(specific absorption rate, 電磁波吸收比值)天線平臺從機載慣性導(dǎo)航設(shè)備獲得飛機的即時偏流角、俯仰角、滾動角數(shù)據(jù),利用這些數(shù)據(jù)控制天線平臺的運動,使平臺在方向位保持與飛行地速方向一致,在俯仰和滾動方向保持水平。天線平臺的跟蹤性能的好壞,將直接影響SAR的成像質(zhì)量,所以有必要對天線平臺的伺服性能進(jìn)行測試。
本文介紹了一種基于 PXI總線技術(shù)的SAR天線穩(wěn)定平臺測試模塊。該測試模塊是SAR天線平臺自動測試系統(tǒng)的主要子系統(tǒng),主要完成仿真轉(zhuǎn)臺位置信號解碼及輸出、平臺跟蹤誤差信號采集以及信號分析處理等功能。
PXI總線技術(shù)簡介
PXI總線技術(shù)是NI發(fā)布的一種全新的開放性、模塊化的儀器總線規(guī)范,是PCI總線在儀器領(lǐng)域的擴展。它將CompactPCI規(guī)范定義的PCI總線技術(shù)發(fā)展成適合于試驗、測量與數(shù)據(jù)采集場合應(yīng)用的機械、電氣和軟件規(guī)范。PXI總線與臺式PCI規(guī)范具有完全相同的性能,是在 PCI總線內(nèi)核技術(shù)上增加了成熟的技術(shù)規(guī)范和要求形成的。它通過增加用于多板同步的觸發(fā)總線和參考時鐘、用于進(jìn)行精確定時的星形觸發(fā)總線以及用于相鄰模塊間高速通訊的局部總線來滿足試驗和測量用戶的要求。PXI規(guī)范在CompactPCI機械規(guī)范中增加了環(huán)境測試和主動冷卻要求,以保證多廠商產(chǎn)品的互操作性和系統(tǒng)的易集成性。它定義Microsoft Windows NT 和Windows 95為其標(biāo)準(zhǔn)軟件框架,并要求所有的儀器模塊都必須帶有按 VISA規(guī)范編寫的Win32設(shè)備驅(qū)動程序,使PXI成為一種系統(tǒng)級規(guī)范,保證系統(tǒng)的易于集成與使用,從而進(jìn)一步降低最終用戶的開發(fā)費用。
測試模塊的結(jié)構(gòu)
作為基于Windows平臺的PXI總線測試卡,該儀器模塊包括PXI插卡和主機驅(qū)動程序軟件兩部分。PXI插卡負(fù)責(zé)測試數(shù)據(jù)的處理,主機驅(qū)動程序負(fù)責(zé)通信。
PXI插卡的結(jié)構(gòu)
PXI插卡從功能上分為增量式編碼器解碼模塊、RS-232接口模塊、 DSP主處理器以及PXI總線接口三部分,該測試卡的結(jié)構(gòu)如圖1所示。增量式編碼器解碼模塊與422差分接收器配合,用于天線仿真轉(zhuǎn)臺兩軸位置數(shù)據(jù)的解碼;DSP主處理器完成測試數(shù)據(jù)的處理,PXI接口模塊主要完成PCI總線信號到本地總線的轉(zhuǎn)換接口;RS-232接口模塊接受PSD(光敏位置探測器) 的串行輸出信號,PSD在測試系統(tǒng)中用于探測天線平臺的跟蹤仿真轉(zhuǎn)臺運動的誤差
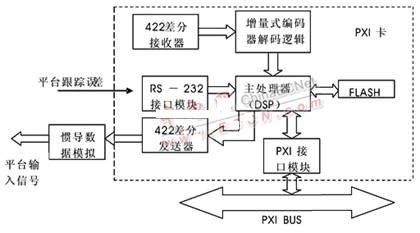
圖1PXI插卡的結(jié)構(gòu)
PSD串行輸出信號的讀取
測試系統(tǒng)采用PSD處理電路通過標(biāo)準(zhǔn)異步串口每5ms發(fā)送一幀數(shù)據(jù),用TI TMS320VC5510作為主處理器,滿足了數(shù)據(jù)存儲空間的要求(內(nèi)部有多達(dá)176KB RAM),但它只有用于同步通信的McBSP,不能直接實現(xiàn)異步串行通信,需要配合DSP的DMA通道通過軟件實現(xiàn)異步通信。將PSD發(fā)送的每一個字節(jié)作為一幀數(shù)據(jù),以起始位的下降沿作為幀同步信號,采用過采樣的方法,將每一位(包括起始位)作為一個16位Word,停止位僅采8位WORD。將一個字節(jié)通過DMA通道緩沖到固定緩沖區(qū),當(dāng)一幀數(shù)據(jù)(10個WORD)全部采完之后,發(fā)送DMA中斷通知DSP進(jìn)行處理。對于串行通信普遍存在的開機錯位亂碼現(xiàn)象,通過對特殊位的判斷進(jìn)行丟棄處理。
增量式編碼器解碼模塊設(shè)計
該測試模塊需要從天線平臺測試仿真轉(zhuǎn)臺接受平臺的位置信息,在各類運動控制系統(tǒng)中,常采用增量式光電編碼器作為反饋檢測元件,其輸出為相差90度的A、B 兩相信號以及周期脈沖復(fù)位信號Z,A、B兩相信號相差的正負(fù)決定運動的正反方向,A、B兩相信號的脈沖輸出計數(shù)決定位置運動的大小,Z為過零復(fù)位脈沖。整個解碼邏輯設(shè)計如圖2所示,由于該測試系統(tǒng)采用的仿真轉(zhuǎn)臺的位置信息有方位、橫滾兩個方向,需要兩組解碼器分別解碼兩個方向的位置信息。
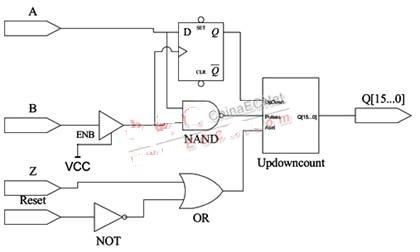
圖2 解碼邏輯設(shè)計