
引言
LD(激光二極管)由于其波長范圍寬、制作簡單、成本低、易于大量生產(chǎn),而且體積小、重量輕、壽命長,因而品種發(fā)展快,目前已超過300種,應(yīng)用范圍覆蓋了整個光電子學(xué)領(lǐng)域,成為當今光電子科學(xué)的核心技術(shù),廣泛應(yīng)用于激光測距、激光雷達、激光通信、激光模擬武器、激光警戒、激光制導(dǎo)跟蹤、引燃引爆、自動控制、檢測儀器等領(lǐng)域,并形成了廣闊的市場。
LD缺點是輸出特性受溫度影響很大,見圖1。

隨著溫度的升高,需要有更多的載流子注入來維持所需的粒子數(shù)反轉(zhuǎn),LD的閾值電流升高,這會導(dǎo)致LD的能量轉(zhuǎn)化效率降低,將電能轉(zhuǎn)換為熱能,發(fā)射波長也隨著溫度的變化發(fā)生漂移。如果LD不能快速有效地制冷,則不儀會影響其輸出特性,甚至?xí)p壞LD。
為了保證LD有較長的工作壽命,必須采取ATC(自動溫度控制)措施,通過控制LD管芯溫度來維持LD正常工作的溫度。
一般ATC是采用半導(dǎo)體TEC(熱電制冷器)。TEC是一種沒有運動部分的小型熱泵,常被運用于空間有限和高可靠性的場合。TEC的功能實現(xiàn)取決于供電電流的方向,通過改變電流方向?qū)崿F(xiàn)制熱或者制冷。本文介紹的芯片MAX1968,是用來控制T
EC實現(xiàn)LD的ATC。
1 LD熱電溫度控制原理
LD溫度控制的基本原理是:溫度傳感器實時地測量安放在TEC冷端的激光管溫度,期望的工作溫度由設(shè)定點的電壓來表示,它與溫度傳感器產(chǎn)生的表示LD實際溫度的電壓通過運放進行比較,產(chǎn)生一個偏差電壓,此信號經(jīng)過相應(yīng)的硬件和控制算法處理后,輸出一定的電壓經(jīng)過驅(qū)動電路送給TEC模塊,TEC根據(jù)流過電流的方向,對LD進行制冷或加熱,使得LD穩(wěn)定在所要求的溫度值。LD的溫度控制系統(tǒng)必須滿足精度高,響應(yīng)速度快、穩(wěn)定性好的要求,而且要能實現(xiàn)雙向控制,以適應(yīng)外界溫度變化和LD本身工作條件的不確定性。同時,還要考慮到LD的保護問題。
TEC控制器按輸出的工作模式可分成線性模式和開關(guān)模式。傳統(tǒng)LD的熱電溫度控制大多采用線性模式的TEC控制器,一個簡單的線性驅(qū)動TEC電路由兩個推挽功率三極管構(gòu)成,雖然具有電流紋波小且容易設(shè)計和制造的優(yōu)點,但功率效率低、控制精度不高,電路集成度較低,而且存在溫度控制“死區(qū)”問題。
本文介紹的MAX1968是高度集成、高性價比、高效率的開關(guān)型TEC模塊驅(qū)動器,采用直接的電流控制。
2 MAX1968功能及其特點
MAX1968是一款適用于Peltier TEC模塊的開關(guān)型驅(qū)動芯片,工作于單電源,能夠提供±3 A雙極性輸出,其功能框圖如圖2所示。
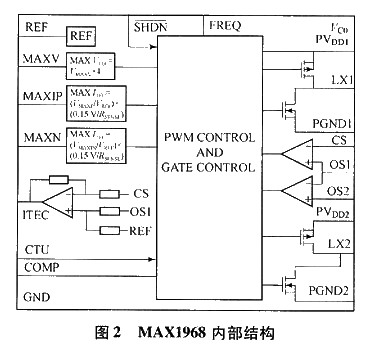
MAX1968主要由兩個開關(guān)型同步降壓穩(wěn)壓器組成,100%的占窄比實現(xiàn)了低壓差操作。在兩個同步降壓穩(wěn)壓器輸出端配有高效MOSFET,由LX1、LX2引出,經(jīng)過LC濾波驅(qū)動TEC。兩個穩(wěn)壓器同時工作產(chǎn)生一個差動電壓,直接控制TEC電流,實現(xiàn)TEC電流的雙向控制,雙極性工作避免了線性驅(qū)動所存在的“死區(qū)”問題,以及輕載電流時的非線性問題,能夠?qū)崿F(xiàn)無“死區(qū)”溫度控制。外部控制電路的輸出電壓加在TEC電流控制輸入端CTL1,直接設(shè)置TEC電流。一般TEC+接OS2,TEC-接OS1,OS1和OS2不是功率輸出,而是用來感測通過TEC的電流,流過TEC的電流由下式確定:

式中:RSENSE為TEC電流的感應(yīng)電阻;VCTL1為外部控制電路的輸出電壓;VREF為參考電壓(1.5 V)。
假設(shè)正向電流為加熱,則VCTL1>1.5 V為加熱,電流的流向從OS2到OS1,OS1、OS2、CS這3個引腳的電壓關(guān)系為:VOS2>VOS1>VCS,反之則制冷。
開關(guān)穩(wěn)壓器是按周期運作的,以把功率傳輸?shù)揭粋€輸出端,這種轉(zhuǎn)換方法會在基頻及諧波上產(chǎn)生很大的噪聲分量,但是在MAX1968中是相位轉(zhuǎn)換并提供互補同相工作周期,所以紋波波形大大減小,抑制了紋波電流和電氣噪聲進入TEC模塊,進而影響LD工作性能。FREQ用來設(shè)置內(nèi)部振蕩器的開關(guān)頻率,當FREQ接地頻率為500 kHz,F(xiàn)REQ接電源頻率為1 MHz。
MAX1968片內(nèi)帶有的MOSFET驅(qū)動器,減少了外部元件,芯片工作在較高的開關(guān)頻率下,可以用更小的電感和電容,從而減少PCB(印制電路板)的面積、降低成本。
為了確保電流控制環(huán)的穩(wěn)定,在COMP端接一補償電容,此電容的值可由下式確定:

式中:f為電流控制環(huán)的頻率,一般不大于LX1端的濾波諧振頻率;gm為環(huán)的跨導(dǎo),典型值為100μA/V;RTEC為TEC阻抗。
將SHDN引腳置低,MAX1968還可以工作在省電模式。
芯片還提供了一系列的保護和監(jiān)測功能:
a) 限制流過TEC最大的正向和反向電流,而且是獨立控制的。可根據(jù)使用的TEC在REF和GND之間通過分壓電阻,在引腳MAXIP和MAXIN端設(shè)置。
b) ITEC為狀態(tài)輸出,用以監(jiān)測TEC的電流,是通過CS與OS1之間的電流感應(yīng)電阻取樣,此輸出電壓與流過TEC的電流成正比。
c) TEC電壓限制功能,MAX1968為TEC提供了最大壓差控制,在REF和GND之間通過分壓電阻設(shè)置VMAx,VMAx在0~1.5 V內(nèi)變化,而通過TEC的電壓為VMAX的4倍。
d) 模擬控制信號直接精確地設(shè)置TEC電流,消除了TEC中的浪涌電流。
3 MAX1968應(yīng)用電路設(shè)計方案

要保證LD正常工作,首先要確定LD的正常工作溫度。LD現(xiàn)在一般都做成內(nèi)帶背光檢測光敏二極管,TEC和溫度傳感器的LD組件其半導(dǎo)體制冷器和溫度傳感器都緊貼在LD的管芯上,這樣制冷效果很好,而且溫度傳感器檢測到的溫度能正確地反應(yīng)LD的工作溫度。MAX1968是一個TEC控制器,用于設(shè)定和穩(wěn)定TEC的溫度。每個加載在MAX1968電流控制輸入端的電壓對應(yīng)一個目標溫度設(shè)定點。適當?shù)碾娏魍ㄟ^TEC將驅(qū)動TEC對LD供熱或是制冷。LD的溫度由溫度傳感器來測量并反饋給MAX1968,用于調(diào)整系統(tǒng)回路和驅(qū)動TEC工作。TEC控制器
為了完成此工作,需要一個精密的輸入放大器,用以準確測量目標溫度和LD實際溫度之間的差別;需要一個補償放大器,用以優(yōu)化TEC對溫度間隔的反應(yīng)。MAX1968能高效率工作以減小熱量,而且體積小,系統(tǒng)外部元件少,所以可廣泛應(yīng)用于激光器、各種光電儀器和光通信、自動測試設(shè)備和生物技術(shù)實驗室沒備等ATC系統(tǒng)。圖3為利用MAX1968設(shè)計LD的溫度控制系統(tǒng)。
系統(tǒng)中主控回路采用負反饋,將溫度傳感器輸出的電壓與給定電壓比較,所得誤差值經(jīng)放大和一定的控制電路或控制算法后,送入MAX1968,以控制TEC上的電壓、電流的大小和方向,進而實現(xiàn)制冷或制熱。
下面簡單介紹LD溫度控制系統(tǒng)中有關(guān)溫度傳感器、給定溫度值等部分的選擇方案。
3.1 溫度傳感器的選擇
溫度傳感器的選擇至少要考慮4方面因素:線性度、溫度范圍、靈敏性以及其大小。常用的溫度傳感器有負溫度系數(shù)的熱敏電阻、RTD(電阻溫度檢測器,包括鉑電阻、銅電阻等)、集成溫度傳感器(如LM335、AD590或AD592等),它們的有關(guān)參數(shù)比較見表1。
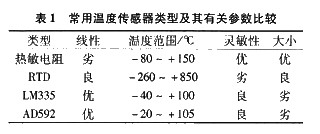
最常用的是熱敏電阻,其靈敏度高,體積小,價格低,但是其阻值與溫度呈非線性關(guān)系,所以在應(yīng)用中通常要進行線性化處理。RTD的阻值隨著溫度的變化線性增加,但其靈敏性較差,一般用在穩(wěn)定性要求不高的場合。LM335、AD590在整個溫度范圍內(nèi)都具有很好的線性,而且靈敏度很高,LM335是電壓輸出型,溫度每變化1 K,其電壓改變10 mV;AD590是電流輸出型,溫度每變化1 K,其電流變化1 mA。它們的溫度穩(wěn)定性可達到0.01℃,在LD溫度控制系統(tǒng)中應(yīng)用也很廣泛。
3.2 給定溫度值的設(shè)定
采用電阻分壓器直接設(shè)定溫度值,其電路簡單,操作方便,但調(diào)節(jié)比較麻煩,而且精度不高。
利用單片機設(shè)定相對某一溫度的給定電壓數(shù)字量,經(jīng)D/A轉(zhuǎn)換器芯片(如MAX5144)轉(zhuǎn)換為模擬給定值。這種方法電路較復(fù)雜,但可通過程序直接將給定值設(shè)定在期望值附近,數(shù)字調(diào)節(jié)的精度很高,而且單片機還可應(yīng)用于控制電路后續(xù)的處理和顯示電路中。
3.3 控制方法
溫度傳感器所提供的反饋信號與設(shè)定的溫度值比較后得到的誤差項經(jīng)過放大處理送給控制電路。最常用的控制電路是由分立元件所構(gòu)成的模擬PID,也可以是數(shù)字PID控制,但是有一點要注意,數(shù)字PID容易在系統(tǒng)引入噪聲,需要進行適當處理,否則會影響系統(tǒng)的性能。除了上面兩種控制方法,還有一種較為常用的方法就是在系統(tǒng)中利用單片機作為微控制器,通過A/D、D/A轉(zhuǎn)換和PID算法,輸出模擬量給MAX1968的CTL1,以驅(qū)動TEC實現(xiàn)對LD的加熱或制冷,軟硬件結(jié)合,可以提高整個系統(tǒng)的穩(wěn)定性和精度。
3.4 其他注意事項
元器件選定后構(gòu)建LD溫度控制系統(tǒng)最重要的工作就是機械安裝。如果熱沉不合適或者器件之間的熱傳導(dǎo)很差,不僅會使得系統(tǒng)性能下降,甚至可能會導(dǎo)致器件的損壞。
從概念上說,熱沉的作用很簡單:提供一個恒溫表面,通常接近室溫。熱沉的性能將影響系統(tǒng)最大溫度范圍和溫度穩(wěn)定性。為了有效地散熱,熱沉最好是帶有翅狀的突起,熱沉表面積越大,熱量消散越快。如果熱沉設(shè)計不好,系統(tǒng)會陷入熱量失控的惡性循環(huán),即熱沉不能及時將泵浦進去的熱量轉(zhuǎn)移走,則TEC冷端的溫度會升高,傳感器感測到這個溫升后,控制器將增加輸出電流以補償溫度的升高,而隨著電流的增加又泵浦更多的熱量進入熱沉,進一步升高TEC冷端的溫度。這樣不斷循環(huán)下去直到到達電流的極限值,這時系統(tǒng)將不再受控,激光器也無法穩(wěn)定在設(shè)定的溫度值。所以熱沉應(yīng)能及時將激光器和TEC冷端所產(chǎn)生的熱量消散掉。
TEC模塊安裝到熱沉中有不同的方法,對具體的TEC,制造商會推薦適當?shù)陌惭b方式,為實現(xiàn)優(yōu)化溫度控制,從待冷卻(或加熱)的器件到TEC表面的熱通路應(yīng)有高的熱傳導(dǎo)率和短的物理長度,溫度傳感器也盡可能靠近激光器以提高測量準確度。同時,還要盡量減小輻射和對流所帶來的損失。
4 結(jié)束語
本文介紹TEC驅(qū)動芯片MAX1968的控制原理及其特點,并給出了該芯片的應(yīng)用設(shè)計方案,同時討論了構(gòu)成系統(tǒng)的各部件選擇方案或原則,對不同的LD和TEC只要恰當?shù)剡x擇外圍器件,用MAX1968構(gòu)建的溫度控制系統(tǒng)可以快速穩(wěn)定地達到所設(shè)定的溫度值,穩(wěn)定性可達到0.01℃。