
摘 要: 隨著車載轉(zhuǎn)臺工作對監(jiān)控系統(tǒng)測量精度要求的不斷提高,傳統(tǒng)的調(diào)平方法已無法滿足車載系統(tǒng)對快速、實(shí)時性的發(fā)展要求。在分析了傳統(tǒng)調(diào)平方法的不足之后,提出了一種對車載轉(zhuǎn)臺水平度進(jìn)行動態(tài)監(jiān)測的方案,利用電子水平儀的特點(diǎn),采用通過DSP控制雙方向同步顯示" title="同步顯示">同步顯示的方法進(jìn)行監(jiān)測。實(shí)驗(yàn)結(jié)果表明,該方法在滿足系統(tǒng)操作方便、成本低的要求的同時,保證了車載轉(zhuǎn)臺的水平精度,具有很強(qiáng)的工程應(yīng)用價值。
關(guān)鍵詞: 轉(zhuǎn)臺 調(diào)平 水平儀 DSP
?
轉(zhuǎn)臺是廣泛應(yīng)用于航空、航天、兵器、航海等領(lǐng)域的光機(jī)電一體化設(shè)備,車載轉(zhuǎn)臺系統(tǒng)憑借其優(yōu)異的機(jī)動性能,得到了廣泛應(yīng)用。然而與陸基轉(zhuǎn)臺不同的是,即使是落地測量,地表的差異、周圍環(huán)境的變化都將導(dǎo)致車載轉(zhuǎn)臺的水平度發(fā)生明顯改變,水平基準(zhǔn)的改變則會影響整個轉(zhuǎn)臺的精度,為此必須對轉(zhuǎn)臺的水平機(jī)構(gòu)進(jìn)行調(diào)整。
傳統(tǒng)的轉(zhuǎn)臺調(diào)平方法是將一臺數(shù)字式電子水平儀以平行于B、C連線的方向擺放到轉(zhuǎn)臺A點(diǎn)上,如圖1所示,測量A處的水平值,然后將轉(zhuǎn)臺旋轉(zhuǎn)180°,再一次測量A處的水平值,兩次測量值的差值即為B處和C處的水平值差,通過調(diào)整B或C點(diǎn)的調(diào)平機(jī)構(gòu),使得三點(diǎn)的水平值達(dá)到相同。這樣,一個由三點(diǎn)所確定的轉(zhuǎn)臺被視為水平。
這種傳統(tǒng)的調(diào)平方法雖然在陸基轉(zhuǎn)臺上應(yīng)用起來非常方便,可是要在車載轉(zhuǎn)臺上仍采用該方法,就會給工作帶來很多的不便。圖2為電子水平儀應(yīng)用在車載轉(zhuǎn)臺系統(tǒng)的工作模型。工作過程中的不足點(diǎn)具體體現(xiàn)在以下三方面:
(1)原有電子水平儀的測量底座對溫度的變化較為敏感,導(dǎo)致不同溫度下的測量結(jié)果有較大差異,所以氣候條件惡劣、周圍環(huán)境干擾大會對水平儀的測量結(jié)果產(chǎn)生很大影響;
(2)工作過程中,因水平儀安裝在轉(zhuǎn)臺上,會隨著轉(zhuǎn)臺工作位置的不斷變換而發(fā)生改變。因此調(diào)平人員不能隨時看到水平儀的讀數(shù),無法掌握恰當(dāng)?shù)恼{(diào)平時刻;
(3)調(diào)平時,調(diào)平人員要同時兼顧在載車上讀數(shù)與載車下調(diào)平的雙重工作,這樣勢必會影響調(diào)平的精確度和快速性。
因此,為了克服傳統(tǒng)調(diào)平方法應(yīng)用在車載轉(zhuǎn)臺上時產(chǎn)生的種種弊端,提出了對車載轉(zhuǎn)臺水平度進(jìn)行動態(tài)監(jiān)測的方法。該方法應(yīng)用到目前的車載轉(zhuǎn)臺設(shè)備中,保證了車載轉(zhuǎn)臺的水平精度,對提高車載設(shè)備的機(jī)動性能起著很重要的作用,并且對今后的車載自穩(wěn)定系統(tǒng)的研究也有著深遠(yuǎn)的意義。
1 新型動態(tài)監(jiān)測系統(tǒng)的工作原理
對車載轉(zhuǎn)臺的水平度進(jìn)行動態(tài)監(jiān)測,其主導(dǎo)思想就是將車載設(shè)備的水平度通過數(shù)字式電子水平儀同步傳送至中心機(jī)和載車側(cè)壁的數(shù)碼管上,使得在中心機(jī)上就可以實(shí)時監(jiān)測轉(zhuǎn)臺的水平度,同時調(diào)平人員調(diào)平時在載車側(cè)壁就可以看到水平儀測量出的水平值。該方法的實(shí)現(xiàn)主要是根據(jù)數(shù)字式電子水平儀會輸出與測量結(jié)果成正比的模擬電壓量的原理,只要將該電壓量進(jìn)行相應(yīng)的模數(shù)轉(zhuǎn)換即可。具體實(shí)現(xiàn)方法如下:
增加一臺電子水平儀,將兩臺電子水平儀全部密封固定在轉(zhuǎn)臺上方或下方,即可避免外界環(huán)境對測量結(jié)果的影響,另外將水平儀的測量值輸出到兩個方向同步顯示,一部分將顯示值引導(dǎo)到主控軟件的界面上,另一部分同步到載車的側(cè)壁上。具體的同步方式如圖3所示。
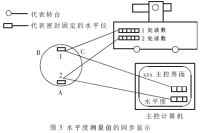
這樣,一方面調(diào)平人員可以根據(jù)中心機(jī)界面上水平度的實(shí)時顯示來監(jiān)測車載轉(zhuǎn)臺的水平度,以判斷是否需要調(diào)平;另一方面,在調(diào)平的過程當(dāng)中,調(diào)平人員可在車下根據(jù)載車側(cè)壁的顯示值進(jìn)行調(diào)平,提高了調(diào)平的精確度和快速性。
2 系統(tǒng)的硬件實(shí)現(xiàn)
2.1 硬件結(jié)構(gòu)
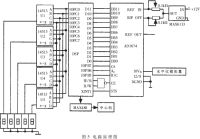
系統(tǒng)的硬件結(jié)構(gòu)框圖如圖4所示,由水平儀、A/D" title="A/D">A/D轉(zhuǎn)換芯片AD1674[1~2]、DSP、BCD-7段鎖存" title="鎖存">鎖存/譯碼/驅(qū)動器MC14513、外部電壓基準(zhǔn)MAX6133、MAX488接口芯片和中心機(jī)等部分組成。
2.2 硬件工作過程分析
在該系統(tǒng)中,A/D轉(zhuǎn)換和數(shù)碼顯示是相對較為重要的部分,下面介紹其具體的工作過程。
2.2.1 A/D轉(zhuǎn)換
當(dāng)水平儀自身顯示值為1時,它會輸出1mV的電壓值,因此該設(shè)計中AD1674采用了外部電壓基準(zhǔn),12V電壓經(jīng)由MAX6133后輸出4.096 V的基準(zhǔn)電壓,于是12位A/D轉(zhuǎn)換器在轉(zhuǎn)換過程中,1mV對應(yīng)一個字節(jié),這樣不但簡化了中間的數(shù)據(jù)運(yùn)算過程,而且減少了由于運(yùn)算帶來的誤差。AD1674將來自水平儀的模擬電壓信號轉(zhuǎn)換成12位的數(shù)字信號后,通過DSP的數(shù)據(jù)總線傳送到DSP中,DSP進(jìn)行相應(yīng)處理之后,輸出相應(yīng)的控制信號驅(qū)動載車側(cè)壁的數(shù)碼管,使之與水平儀同步顯示相同的測量值。
2.2.2 數(shù)碼顯示
DSP將從A/D轉(zhuǎn)換器讀取回來的數(shù)據(jù)在自身的寄存器內(nèi)部進(jìn)行十進(jìn)制數(shù)據(jù)轉(zhuǎn)換之后,再由IOPC口輸出顯示數(shù)字的BCD碼到BCD-7段鎖存/譯碼/驅(qū)動器MC14513中,由剩余閑置的I/O口產(chǎn)生BCD碼輸入鎖存信號。當(dāng)BCD碼被鎖存后,經(jīng)7段譯碼,相應(yīng)位的數(shù)碼管將產(chǎn)生相應(yīng)的顯示值[5]。與此同時,DSP將數(shù)據(jù)從其自身串口" title="串口">串口發(fā)出,通過MAX488芯片轉(zhuǎn)換成RS422信號后傳送至中心機(jī),并在中心機(jī)的界面上實(shí)時顯示。圖5為水平儀同步顯示部分的電路原理圖[3~4]。
3 軟件設(shè)計
該系統(tǒng)軟件部分主要包括數(shù)碼管顯示和中心機(jī)實(shí)時監(jiān)控兩部分。
3.1 數(shù)碼管顯示程序設(shè)計
數(shù)碼管顯示程序主要是采用DSP進(jìn)行控制,具體包括以下幾部分[5]:主程序、中斷初始化程序、十進(jìn)制子程序" title="子程序">子程序、串口發(fā)數(shù)子程序和顯示子程序。其中,主程序中開始啟動A/D轉(zhuǎn)換并等待中斷;中斷初始化程序主要負(fù)責(zé)設(shè)置外部中斷的響應(yīng)方式、外部中斷的開啟、總中斷的開啟;十進(jìn)制子程序把12位二進(jìn)制數(shù)據(jù)轉(zhuǎn)換成相應(yīng)的十進(jìn)制數(shù)據(jù);串口發(fā)數(shù)子程序?qū)腁/D轉(zhuǎn)換器讀取回來的數(shù)據(jù)量通過串口以固定波特率發(fā)送到中心機(jī);顯示子程序?qū)⒁@示數(shù)字的BCD碼發(fā)送到MC14513并置位相應(yīng)鎖存位。系統(tǒng)程序流程框圖如圖6所示。

3.2 實(shí)時監(jiān)控程序設(shè)計
實(shí)時監(jiān)控程序的任務(wù)是增加兩個對水平度進(jìn)行實(shí)時顯示的窗口,該窗口將從DSP傳送過來的RS422信號轉(zhuǎn)換為水平度的測量值顯示出來,采用Visual C++實(shí)現(xiàn),具體包括以下幾個方面:顯示窗口的創(chuàng)建、串口通信、水平度在窗口中的同步顯示[6]。實(shí)時監(jiān)控窗口如圖7所示。
4 實(shí)驗(yàn)結(jié)果及分析
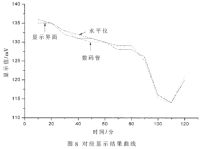
將其中一個電子水平儀輸出在顯示界面和數(shù)碼管上的值與水平儀自身所帶的顯示屏顯示結(jié)果進(jìn)行對比,采用定點(diǎn)等時間間隔連續(xù)測量法進(jìn)行檢測,同時記錄下當(dāng)時的顯示界面、數(shù)碼管顯示及水平儀顯示的數(shù)值。表1記錄了兩小時之內(nèi)的實(shí)驗(yàn)數(shù)據(jù)。
?
根據(jù)顯示數(shù)據(jù)繪制的曲線如圖8所示。表1和圖8的對比結(jié)果表明,采用該設(shè)計方法可以使得水平儀、數(shù)碼管以及顯示界面的同步顯示結(jié)果誤差僅在一個碼值之內(nèi)(2角秒),精度完全滿足車載轉(zhuǎn)臺的水平度控制要求(10角秒以內(nèi)),實(shí)現(xiàn)了在中心機(jī)上實(shí)時監(jiān)測載車系統(tǒng)的水平度,并且調(diào)平人員可根據(jù)載車側(cè)壁的數(shù)碼顯示值更加直觀、快捷地調(diào)整載車車體,使之水平。
參考文獻(xiàn)
1 AD1674 Data sheet.Analog Devices,2000
2 DATA-Acquisition databook.Analog Devices Corp, 1991
3 王鵬飛,崔文兵,陳 鈞.12位模/數(shù)轉(zhuǎn)換器在測試儀中的應(yīng)用[J].微電子技術(shù), 2000;28 (6)
4 葉麗娜.使用AD574/674A/1674A須注意的問題[J].電子技術(shù)應(yīng)用,1996;(9)
5 黃英哲, 董勝源. TMS320C240原理與C語言控制應(yīng)用實(shí)習(xí).北京:中國水利水電出版社,2003
6 李憲勇.Visual C++ 串口通信技術(shù)與工程實(shí)踐.北京:人民郵電出版社,2003