
在舞臺(tái)上,,有時(shí)為了營(yíng)造某種特殊效果,,需要關(guān)閉除探照燈以外的所有現(xiàn)場(chǎng)燈。探照燈必須照在演員身上,。由于探照燈高高懸掛在天花板上,,當(dāng)演員移動(dòng)時(shí),依靠人工來(lái)完成探照燈方向調(diào)節(jié)非常不方便,,而通過(guò)遙控調(diào)節(jié)則很方便,,有時(shí)演員的位置又是固定的,這可能需要多臺(tái)探照燈透視照射一個(gè)固定位置(例如舞臺(tái)的中央),。如果探照燈能夠?qū)⑦@些位置以及燈的亮度預(yù)存到某個(gè)頻道,,需要時(shí)再直接調(diào)則會(huì)方便很多。
針對(duì)此應(yīng)用,,本文設(shè)計(jì)了一種支持頻道存儲(chǔ)的遙控探照燈系統(tǒng)來(lái)實(shí)現(xiàn)上述功能,。該系統(tǒng)還可應(yīng)用在監(jiān)獄,、各種高空作業(yè)和曠野,、海面等工作場(chǎng)所,對(duì)遠(yuǎn)距離巡查,、追蹤,、搜索、拯救和作業(yè)施工進(jìn)行全方位,、多角度照明,。
因?yàn)檎丈潼c(diǎn)的位置不定,要求探照燈可以上下左右360度自由移動(dòng),,所以本系統(tǒng)采用了兩個(gè)電機(jī),,一個(gè)控制探照燈上下轉(zhuǎn)動(dòng),另一個(gè)控制探照燈左右轉(zhuǎn)動(dòng),,此外,,有時(shí)兩臺(tái)探照燈離得很近。
當(dāng)控制某一臺(tái)探照燈時(shí),,不能影響鄰近的探照燈,,這就要求遙控控制信號(hào)的角度不能太大。相反,,如果角度過(guò)小的話,,探照燈又很難接收到信號(hào),,會(huì)使控制很不方便,因此信號(hào)的角度也不能太小,,另一方面,,為便于操作,探照燈的可控制距離應(yīng)盡可能地遠(yuǎn),。
針對(duì)上述要求,,本文采用了紅外與激光通信相結(jié)合的方法,在發(fā)送探照燈預(yù)選信號(hào)時(shí)采用激光發(fā)送,,而發(fā)送探照燈轉(zhuǎn)動(dòng)控制,、亮度控制時(shí)等命令時(shí)采用紅外發(fā)送,在場(chǎng)景存儲(chǔ)及調(diào)出摸式的最后確認(rèn)(控制哪臺(tái)探照燈)時(shí)采用激光發(fā)送,,從而實(shí)現(xiàn)準(zhǔn)確,,方便的調(diào)節(jié),燈的亮度控制應(yīng)盡可能采用微調(diào)來(lái)滿足各種亮度的需求,,因此,,將燈的亮度從最亮到熄滅劃分為256個(gè)段。
硬件系統(tǒng)設(shè)計(jì)
1,、總體結(jié)構(gòu)
該系統(tǒng)共包括5個(gè)模塊:CPU模塊,、電源模塊、電機(jī)模塊,、燈控模塊和通信模塊,。其中,通信模塊又包括紅外通信模塊,、激光通信模塊和指示燈顯示模塊,,總體硬件原理框圖如圖1所示。
|
|
|---|
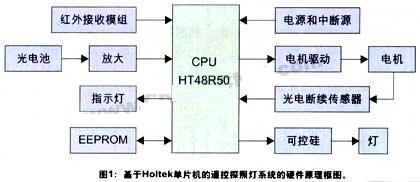
紅外接收模組接收紅外信號(hào)后送入CPU進(jìn)行分析,,以確定命令的性質(zhì),,遙控器發(fā)送的激光信號(hào)由光電池接收,經(jīng)放大后送入CPU,。由光電繼續(xù)器,、電機(jī)驅(qū)動(dòng)及電機(jī)組成的閉環(huán)電路用來(lái)控制電機(jī)的位置,以控制探照燈的照射點(diǎn),,在電源模塊中產(chǎn)生一個(gè)2倍工頻的信號(hào),,該信號(hào)連接到CPU的中斷腳,中斷程序通過(guò)可控硅控制燈的亮度,,EEPROM用來(lái)存儲(chǔ)頻道,、探照燈位置和亮度,指示燈用來(lái)顯示探照燈當(dāng)前的狀態(tài),。
2,、CPU模塊
處于成本的考慮,,該系統(tǒng)的各個(gè)子功能模塊須盡量減少硬件,并盡可能用軟件代替硬件,,所以該系統(tǒng)的紅外通信模塊,、激光通信模塊的解調(diào)都完全由軟件實(shí)現(xiàn),這就使得CPU中無(wú)需這些專用模塊,,從而降低了成本,,電機(jī)的驅(qū)動(dòng)也沒(méi)有采用專用的驅(qū)動(dòng)芯片,而是由通用I/O接口通過(guò)三極管來(lái)驅(qū)動(dòng)電機(jī)轉(zhuǎn)動(dòng),。
由于節(jié)省了許多專用模塊,,因此必然會(huì)增加對(duì)CPU通用I/O的需要,這就要求CPU中要有足夠的通用I/O接口,,此外,,系統(tǒng)還必須能穩(wěn)定可靠地工作,并具有較強(qiáng)的抗干擾能力,。
基于以上原因,,本方案選擇了Holtek公司的低價(jià)位I/O型單片機(jī)HT48R50A-1,這是一款基于RISC結(jié)構(gòu),、低功率,、安全靜態(tài)CMOS設(shè)計(jì)的高性能8位單片機(jī),該單片機(jī)的工作電壓在8MHz時(shí)為3.3V-5.5V,,4MHz時(shí)為2.2V-5.5V,,它的功率損耗低,在5V/4MHz條件下的典型值為2mA,,不使用看門狗定時(shí)器和RTC時(shí),,3V下靜態(tài)電流小于1μA,此外,,它還具有工業(yè)級(jí)的工作溫度(-40℃-85℃)。
HT48R59A-1器件的其他特性還包括:具有4096×14位程序存儲(chǔ)器ROM,、160×8位數(shù)據(jù)存儲(chǔ)器RAM,、6級(jí)堆棧;具有表格讀取功能,,支持直接和間接兩種尋址模式,;共有63條功能強(qiáng)大的指令。支持位操作,,大多數(shù)指令 執(zhí)行時(shí)間只需要一個(gè)指令周期,;
片內(nèi)有32個(gè)具有上拉功能的雙向輸入輸出接口,PA接口具有喚醒功能,;有一個(gè)外部中斷輸入和事件計(jì)數(shù)輸入,。蜂鳴器驅(qū)動(dòng)并支持PFD,;內(nèi)置晶體及電阻電容振蕩電路,擁有看門狗定時(shí)器,;具有預(yù)分頻器及中斷功能的定時(shí)器,;CPU在沒(méi)有任務(wù)時(shí)可以進(jìn)入暫停模式以降低功耗,且具有低電位復(fù)位(LVR)特性,。
3,、通信模塊
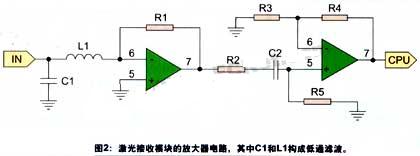
紅外接收模組可以直接將接收到的紅外信號(hào)變?yōu)門TL電平,激光接收模組則不同,,由光電池接收到的激光信號(hào)非常微弱須經(jīng)放大后才能被單片機(jī)識(shí)別,。64頁(yè)圖2為放大電路,其中C1和L1構(gòu)成低通濾波,,第一級(jí)運(yùn)放和R1,、R2將光電池的電流信號(hào)轉(zhuǎn)換為電壓信號(hào),C2和C5為高通濾波,,第二級(jí)運(yùn)放和R3,、R4將電壓放大成TTL電平。
|
|
|---|
4,、燈控模塊
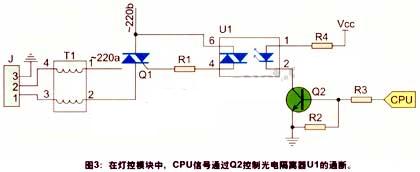
硬件原理如圖3所示,,T1為濾波電感,Q1為可控硅,,U1為光電隔離器,,CPU信號(hào)通過(guò)Q2控制U1的通斷,當(dāng)U1導(dǎo)通時(shí),,Q1導(dǎo)通,,當(dāng)U1關(guān)斷時(shí),反相電壓使Q1截止,,通過(guò)控制可控硅的導(dǎo)通時(shí)間可實(shí)現(xiàn)控制燈的亮度控制,。
|
|
|---|
5、電機(jī)模塊
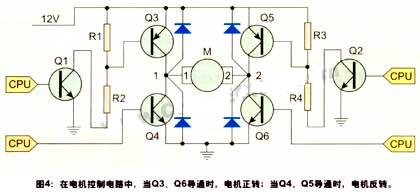
該系統(tǒng)有兩個(gè)相同的直流電機(jī)模塊,。由通用I/O接口通過(guò)三極管控制轉(zhuǎn)停(如圖4),。當(dāng)Q3、Q6導(dǎo)通時(shí),,電機(jī)正轉(zhuǎn),;當(dāng)Q4、Q5導(dǎo)通時(shí),,電機(jī)反轉(zhuǎn),;當(dāng)Q3的通斷由Q1通過(guò)R1、R2分壓實(shí)現(xiàn)控制,當(dāng)Q1導(dǎo)通時(shí),,R1兩端的壓降使Q3導(dǎo)通,。
|
|
|---|
6、電源模塊
該系統(tǒng)由220V工頻交流電供電,,電源模塊的功能是輸出兩個(gè)電源(5V的單片機(jī)電源和12V的直流電機(jī)電源)和一個(gè)中斷源,。中斷源用來(lái)產(chǎn)生兩倍工頻的中斷信號(hào)給單片機(jī),從而調(diào)節(jié)探照燈的亮度,,因此,,該系統(tǒng)采用了一個(gè)220V轉(zhuǎn)雙12V變壓器,并通過(guò)二極管,、三端穩(wěn)壓器和校正電容實(shí)現(xiàn)輸出,。
軟件設(shè)計(jì)
軟件分兩部分:主程序和中斷程序,主程序的主要任務(wù)有:接收紅外,、激光信號(hào),、進(jìn)行解調(diào),判斷遙控器所發(fā)的命令是什么,,并執(zhí)行該命令,;控制電機(jī)轉(zhuǎn)動(dòng)并檢測(cè)反饋信號(hào),準(zhǔn)確定位探照燈位置,,根據(jù)命令存儲(chǔ)或調(diào)出指定的頻道,;根據(jù)探照燈當(dāng)前狀態(tài)控制指示燈的亮滅。具體程序流程圖如圖5(詳見(jiàn)本刊網(wǎng)站)所示,,中斷程序的主要任務(wù)是:對(duì)燈控I/O引腳的低電平進(jìn)行延時(shí),,以達(dá)到調(diào)節(jié)燈亮度的目的。
試驗(yàn)結(jié)果表明,,該系統(tǒng)性能穩(wěn)定,,可準(zhǔn)確地完成燈控、轉(zhuǎn)動(dòng),,以及某個(gè)頻道的存儲(chǔ)及調(diào)出等功能,,并具有操作方便的優(yōu)點(diǎn),已得到多家公司的認(rèn)可,。